

基于时空预留方案的十字路口交通自动调节智能交通管理系统附matlab代码
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
⛄ 内容介绍
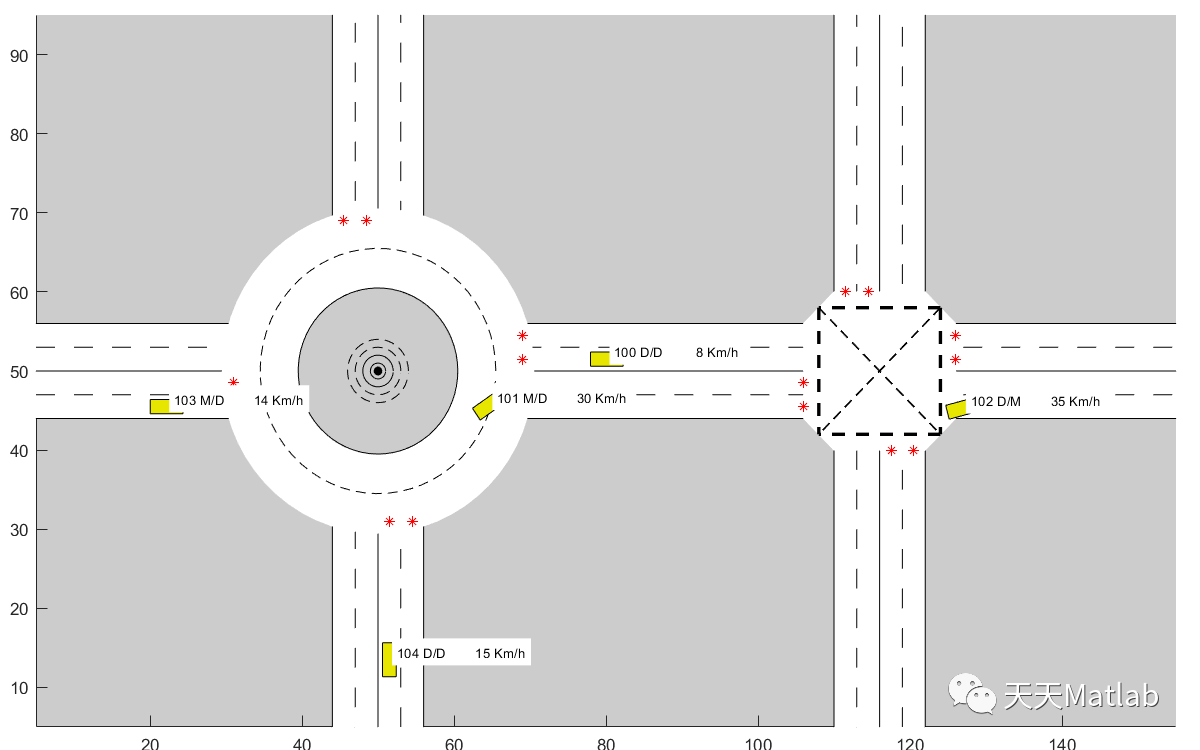
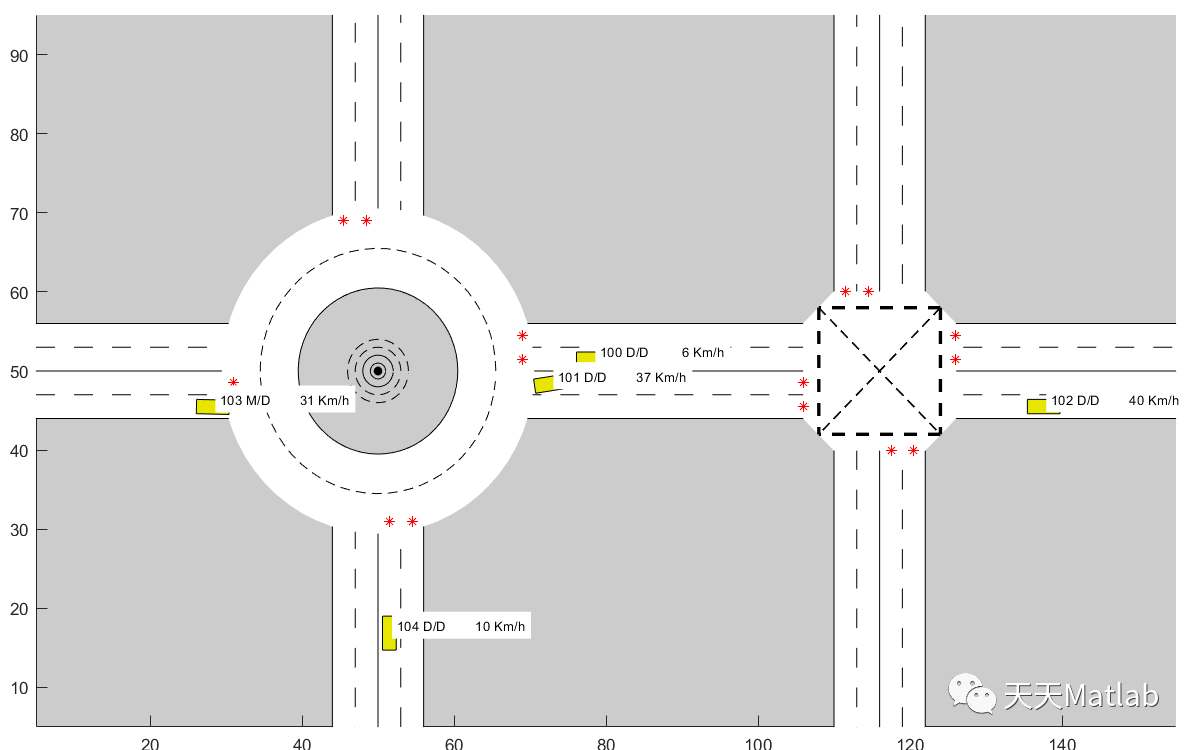
本文介绍了一种应用于十字路口交通自动调节的智能交通管理系统的传统算法。遗留算法的应用使智能交叉口能够容纳低比例的、没有装备或V2V和V2I通信有问题的车辆。所开发的智能交通管理技术是基于时空预留方案的,旨在最大限度地减少事故、交通拥堵以及由此产生的道路交通环境成本。三种智能交通管理算法应用于道路交叉口、环形交叉口和十字路口,其性能得到了分析。与传统的交通管理技术相比,使用所开发的智能交通管理技术的模拟结果表明,交通输出流量可以增加,交通流率可以提高,穿越交叉口的平均时间可以显著减少。当交通流量大时,这种减少更为明显。所进行的研究表明,在使用传统算法的智能交叉口中纳入低比例的未装备或有故障的V2V和V2I通信的车辆,对交通流的影响很小。
⛄ 部分代码
%--------------------------------------------------------------------------
% ISR-TrafSim v2.0
%
%--------------------------------------------------------------------------
% This Matlab file is part of the ISR-TrafSim: a Matlab
% library for traffic simulation and pose estimation in Urban environments,
% namely roundabouts and crossroads.
%
% http://www.isr.uc.pt/~conde/isr-trafsim/
%
%-CITATION---------------------------------------------------------------------------
% If you use this software please cite one of the following papers:
% 1) L.C.Bento, R.Parafita, S.Santos and U.Nunes, An Intelligent Traffic Management
% at Intersections legacy mode for vehicles not equipped with V2V and V2I Communications,
% 16th IEEE Int.Conf. Intelligent Transportation Systems, Netherlands, 2013.
% 2) L.C.Bento, R.Parafita and U.Nunes, Inter-vehicle sensor fusion for accurate vehicle
% localization supported by V2V and V2I communications, 15th IEEE Int.Conf. Intelligent
% Transportation Systems, USA, 2012.
% 3) L.C.Bento, R.Parafita and U.Nunes, Intelligent traffic management at intersections
% supported by V2V and V2I communications, 15th IEEE Int.Conf. Intelligent
% Transportation Systems, USA, 2012.
%
%-DESCRIPTION--------------------------------------------------------------
%
% Roundabout gestion module
%
%-DISCLAIMER---------------------------------------------------------------
% This program is distributed in the hope that it will be useful,but WITHOUT ANY WARRANTY;
% without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
% You can use this source code without licensing fees only for NON-COMMERCIAL research
% and EDUCATIONAL purposes only.
% You cannot repost this file without prior written permission from the authors.
%
%-AUTHORS------------------------------------------------------------------
% Urbano Nunes*
% Luis Conde Bento**
% Ricardo Parafita*
% Sergio Santos*
%
% *Institute of Systems and Robotics - University of Coimbra
% **School of Technology and Management - Polytechnic Institute of Leiria
%--------------------------------------------------------------------------
function [] = round_gest_isr_trafsim()
global s c
% s.round_notify_list -> [id ; node ; state; time; posx; posy; inroad; outroad; currentVel; maxVel; carType, CurrentRoad, timeoflastnotify]
% Delete layers if are no longer necessary
delete_layer_isr_trafsim();
% Add car to s.round_notify_list if car is not in there (no commu)
add_car_notify_round_isr_trafsim();
% Delete car withot V2I from list s.rg_count_tab & s.list_round_already_reserve
if(s.time>s.time_round_without_commu && s.time_round_without_commu~=-1)
%keyboard
id=s.car_round_without_commu;
s.time_round_without_commu=-1;
s.car_round_without_commu=[];
for i=1:size(s.rg_count_tab,2)
for p=3:10
if(isnan(s.rg_count_tab(p,i)))
s.rg_count_tab(p,i)=0;
s.rg_count_tab(2,i)=s.rg_count_tab(2,i)-1;
break
end
end
end
for i=2:size(s.list_round_already_reserve,1)
if(~isempty(find(s.list_round_already_reserve(i,:)==id)))
s.list_round_already_reserve(i,:)=[];
break
end
end
if(ismember(id,c.listactive))
pos=find(c.listactive==id);
road=find(s.rg_count_tab(1,:)==c.car(pos).rar);
for p=3:10
if(s.rg_count_tab(p,road)==0)
s.rg_count_tab(p,road)=id;
s.rg_count_tab(2,road)=s.rg_count_tab(2,road)+1;
break
end
end
end
end
% Process Algoritm
Exist_Car_withot_V2I=~isempty(s.list_round_without_commu); % Doesn't exist car without communication on the list
Exist_Notification=size(s.round_notify_list,2)>1; % Exist notifications
if(s.pause==1)
s.pause=0; % to pause only once
keyboard
end
if(Exist_Notification && ~Exist_Car_withot_V2I)
aux=2; % aux starts in 2 because first notification is NaN
while( aux <= size(s.round_notify_list,2) ) % For each new notification
cond1=s.round_notify_list(3,aux)==-1;
cond2=s.time>s.round_notify_list(4,aux)+2;
cond3=(dist_isr_trafsim(50,50,s.round_notify_list(5,aux),s.round_notify_list(6,aux)))<s.control_radius_round;
if(cond1 && cond2 && cond3)
id=s.round_notify_list(1,aux); % Car Id
n=find(c.listactive==id); % Car place on c.listactive
CarCommu=~isnan(s.round_notify_list(9,aux)); % If car have communications
if(CarCommu)
% Generate trajectory
traj=gen_traj_isr_trafsim(s.round_notify_list(7,aux),s.round_notify_list(8,aux));
% View road after roundabout
rafter=check_road_after_roundabout_isr_trafsim(traj);
% Try generate a velocity profile
vel_prof=reserve_space_isr_trafsim(round2(s.time,0.001),s.round_notify_list(5,aux),s.round_notify_list(6,aux),s.round_notify_list(9,aux),s.round_notify_list(10,aux),s.round_notify_list(11,aux),traj,rafter,n,'round',s.round_method);
% Order to send velocity profile
if(~isnan(vel_prof))
send_velocity_profile_isr_trafsim(n,aux,id,vel_prof,rafter,'round');
if(vel_prof(1,end)>s.round_last_time_used) % Store last time used by round gest mode
s.round_last_time_used=vel_prof(1,end);
%last_used_round=vel_prof(1,end)
end
%viewM(s.ocmap2,s.layer,0,s.occup_res2)
break
end
else
exist_exit_full=0;
if(s.round_notify_list(12,aux)==13 || s.round_notify_list(12,aux)==14)
for i=3:size(s.rg_count_tab,2)
if(s.rg_count_tab(2,i)>s.rg_car_limit)
exist_exit_full=1;
end
end
else
for i=1:size(s.rg_count_tab,2)
if(s.rg_count_tab(2,i)>s.rg_car_limit)
exist_exit_full=1;
end
end
end
previous_withouV2I_exit=s.time_round_without_commu==-1;
% To dont send cars when one of exits is already full
if(~exist_exit_full && previous_withouV2I_exit)
% Reserve space
[M,L]=reserve_all_paths_isr_trafsim(s.round_notify_list(12,aux),n,'wait','round');
% Add generated matrix in correct space
if(s.time>s.round_last_time_used)
last=s.time;
else
last=s.round_last_time_used;
end
for i=1:size(M,3)
current_layer=round2(last+L(i),0.01); % Layer to write
% Add layer if is necessary
exist_current_layer=find(s.layer==current_layer);
if(isempty(exist_current_layer))
create_layer(round2(current_layer,0.01));
end
% Write layer in correct position and verify if everything is ok
layer_pos=find(s.layer==current_layer);
if(nnz(s.ocmap2(:,:,layer_pos)&M(:,:,i))>0)
keyboard
end
s.ocmap2(:,:,layer_pos)=s.ocmap2(:,:,layer_pos)+M(:,:,i);
end
s.list_round_without_commu(end+1,:)=[id last+L(1) last+L(end) s.round_notify_list(12,aux)];
s.round_last_time_used=last+L(end);
%round=s.list_round_without_commu
% Agend time to empty list already reserved
s.time_round_without_commu=s.list_round_without_commu(3);
s.car_round_without_commu=s.list_round_without_commu(1);
%s.list_round_already_reserve(end+1,:)=NaN;
for i=1:size(s.rg_count_tab,2)
for p=3:10
if(s.rg_count_tab(p,i)==0)
s.rg_count_tab(p,i)=NaN;
break
end
end
end
s.rg_count_tab(2,:)=s.rg_count_tab(2,:)+1;
% To view the map (help on debug)
% viewM(s.ocmap2,s.layer,0,s.occup_res2,n,'round')
% Delete notification
s.round_notify_list(:,aux)=[];
% Driver ignores traffic rules
c.car(n).dri_ignore_trf_round=1;
%disp(['Ignore Round: ' num2str(id)]);
break
end
end
end
aux=aux+1;
end
elseif(Exist_Car_withot_V2I)
if(s.time>s.list_round_without_commu(2)) % s.time>s.list_round_without_commu(2) to
% Give permission to car to advance
n=find(c.listactive==s.list_round_without_commu(1));
c.car(n).nostop(end+1)=(s.list_round_without_commu(4));
% Add car to list already reserved
if(isempty(find(s.list_round_already_reserve==s.list_round_without_commu(1))))
[ll cc]=find(s.list_round_already_reserve(1,:)==s.list_round_without_commu(4));
s.list_round_already_reserve(end+1,cc)=s.list_round_without_commu(1);
end
% Delete car from list
[ll cc]=find(s.list_round_without_commu==s.list_round_without_commu(1));
s.list_round_without_commu(ll,:)=[];
end
end
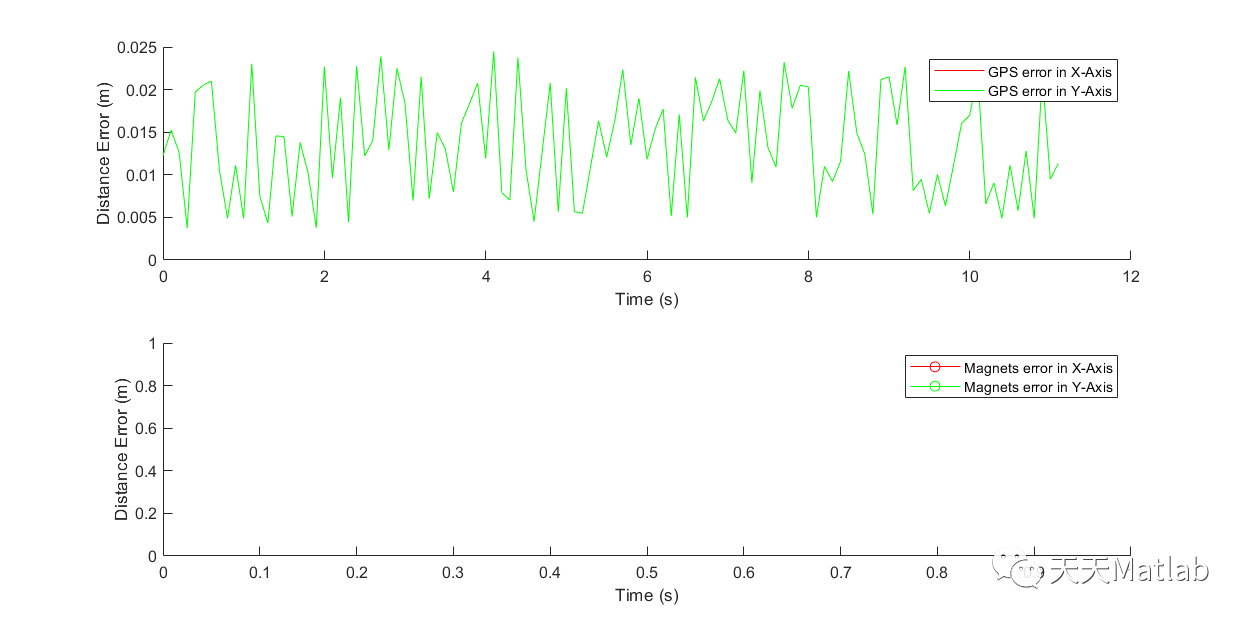
end⛄ 运行结果
⛄ 参考文献
1) L.C.Bento, R.Parafita, S.Santos and U.Nunes, An Intelligent Traffic Management at Intersections legacy mode for vehicles not equipped with V2V and V2I Communications, 16th IEEE Int.Conf. Intelligent Transportation Systems, Netherlands, 2013.
% localization supported by V2V and V2I communications, 15th IEEE Int.Conf. Intelligent Transportation Systems, USA, 2012.
supported by V2V and V2I communications, 15th IEEE Int.Conf. Intelligent Transportation Systems, USA, 2012.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |