

【路径规划】基于模拟退火粒子群结合DWA实现机器人全局局部动态规划附matlab代码
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
⛄ 内容介绍
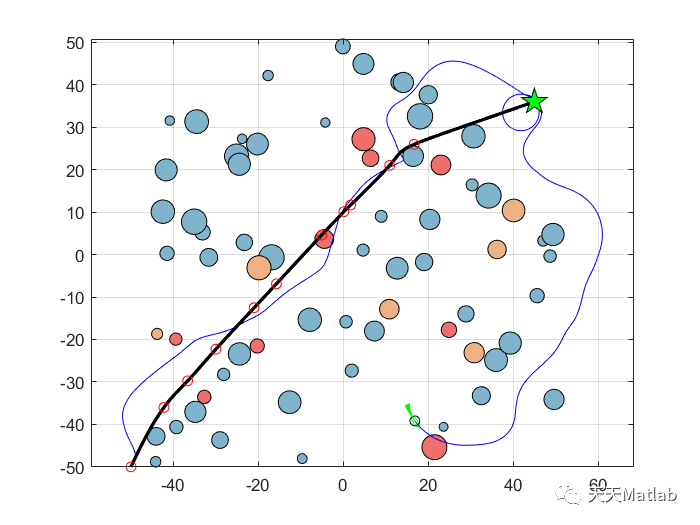
一种基于DWA的ROS机器人局部路径规划方法,包括,利用机器人SLAM建图构建全局地图并获取机器人的起始点和目标点;在构建的全局地图中,利用模拟退火粒子群算法进行全局路径规划,寻找最优路径;当机器人沿着全局最优路径运动时,利用机器人所携带的传感器实时检测局部环境信息更新地图信息;判断是否存在动态障碍物,若存在,则调用DWA算法进行局部路径规划,避开障碍物;当机器人到达局部目标点以后,继续沿着全局最优路径进行运动,并不断实时检测局部环境信息,若再出现障碍物,则继续调用DWA算法进行局部路径规划,直至机器人到达目标点.本发明能成功避开障碍物,评价函数的距离因子对障碍物同时通过较为狭窄的通道.
⛄ 部分代码
function PlotSolution(sol,model)
xs=model.xs;
ys=model.ys;
xt=model.xt;
yt=model.yt;
xobs=model.xobs;
yobs=model.yobs;
robs=model.robs;
XS=sol.XS;
YS=sol.YS;
xx=sol.xx;
yy=sol.yy;
theta=linspace(0,2*pi,100);
for k=1:numel(xobs) %填充障碍物(应该是)
fill(xobs(k)+robs(k)*cos(theta),yobs(k)+robs(k)*sin(theta),[0.5 0.7 0.8]);
hold on;
end
plot(xx,yy,'k','LineWidth',2);
plot(XS,YS,'ro');
plot(xs,ys,'bs','MarkerSize',12,'MarkerFaceColor','y'); %初始点
plot(xt,yt,'kp','MarkerSize',16,'MarkerFaceColor','g'); %终点
hold off;
grid on;
axis equal;
drawnow limitrate;
end
⛄ 运行结果
⛄ 参考文献
[1] 宋彬. 结合粒子群算法和改进蚁群算法的机器人混合路径规划[D]. 中国矿业大学.
[2] 王智文, 曹新亮, 王宇航. 一种基于DWA的ROS机器人局部路径规划方法:, CN112325884A[P]. 2021.
[3] 高岳林, 武少华. 基于自适应粒子群算法的机器人路径规划[J]. 郑州大学学报:工学版, 2020, 41(4):6.
[4] 薛盼为. 基于模拟退火—量子遗传算法的机器人路径规划研究[D]. 武汉理工大学, 2013.
[5] 孙波, 陈卫东, 席裕庚. 基于粒子群优化算法的移动机器人全局路径规划[J]. 控制与决策, 2005, 20(9):5.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |