

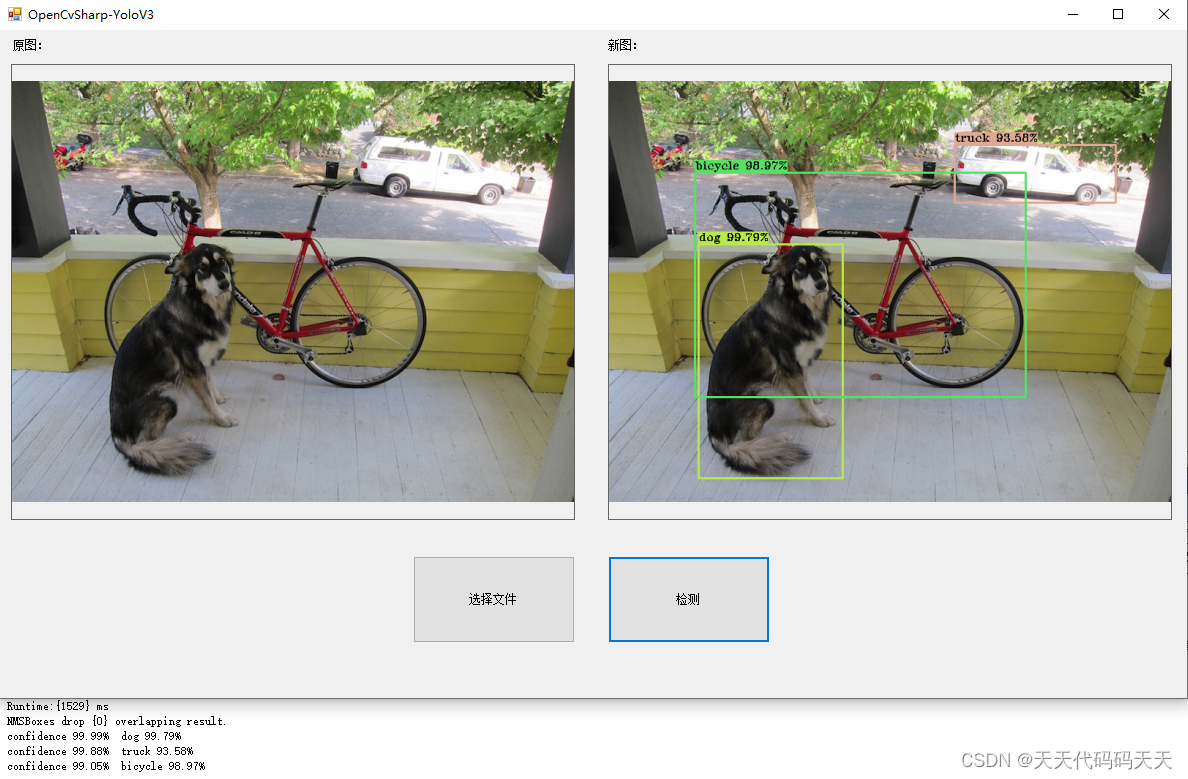
C#OpenCvSharp YOLO v3 Demo_pyqt yolo
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
效果
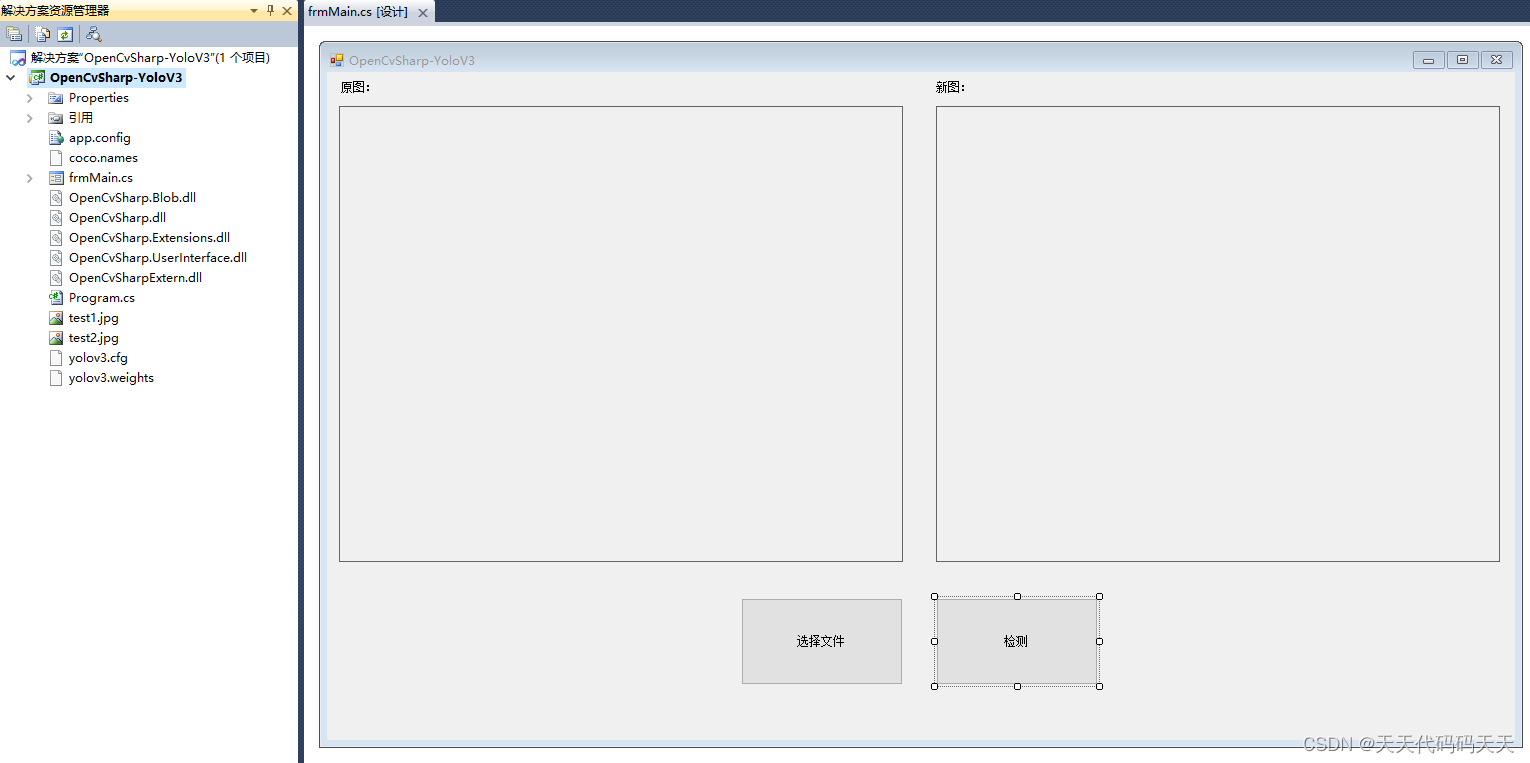
项目
代码
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Linq;
using System.Text;
using System.Windows.Forms;
using OpenCvSharp;
using System.IO;
using OpenCvSharp.Dnn;
using System.Diagnostics;
using OpenCvSharp.Extensions;
namespace OpenCvSharp_YoloV3
{
public partial class frmMain : Form
{
public frmMain()
{
InitializeComponent();
}
//random assign color to each label
private static readonly Scalar[] Colors = Enumerable.Repeat(false, 80).Select(x => Scalar.RandomColor()).ToArray();
//get labels from coco.names
private static readonly string[] Labels = File.ReadAllLines("coco.names").ToArray();
string cfg = "yolov3.cfg";
string model = "yolov3.weights";
const float threshold = 0.5f; //for confidence
const float nmsThreshold = 0.3f; //threshold for nms
Net net;
private void frmMain_Load(object sender, EventArgs e)
{
//load model and config, if you got error: "separator_index < line.size()", check your cfg file, must be something wrong.
net = CvDnn.ReadNetFromDarknet(cfg, model);
#region set preferable
net.SetPreferableBackend(3);
/*
0:DNN_BACKEND_DEFAULT
1:DNN_BACKEND_HALIDE
2:DNN_BACKEND_INFERENCE_ENGINE
3:DNN_BACKEND_OPENCV
*/
net.SetPreferableTarget(0);
/*
0:DNN_TARGET_CPU
1:DNN_TARGET_OPENCL
2:DNN_TARGET_OPENCL_FP16
3:DNN_TARGET_MYRIAD
4:DNN_TARGET_FPGA
*/
#endregion
}
private void button1_Click(object sender, EventArgs e)
{
if (bmp == null) return;
//get image
var org = OpenCvSharp.Extensions.BitmapConverter.ToMat(bmp);//bitmap转mat
Cv2.CvtColor(org, org, ColorConversionCodes.RGBA2RGB);//mat转三通道mat
//setting blob, size can be:320/416/608
//opencv blob setting can check here https://github.com/opencv/opencv/tree/master/samples/dnn#object-detection
var blob = CvDnn.BlobFromImage(org, 1.0 / 255, new OpenCvSharp.Size(416, 416), new Scalar(), true, false);
//input data
net.SetInput(blob);
//get output layer name
var outNames = net.GetUnconnectedOutLayersNames();
//create mats for output layer
var outs = outNames.Select(_ => new Mat()).ToArray();
#region forward model
Stopwatch sw = new Stopwatch();
sw.Start();
net.Forward(outs, outNames);
sw.Stop();
Console.WriteLine("Runtime:{" + sw.ElapsedMilliseconds + "} ms");
#endregion
//get result from all output
GetResult(outs, org, threshold, nmsThreshold);
Bitmap Bitmap1 = BitmapConverter.ToBitmap(org);
pictureBox2.Image = Bitmap1;
}
/// <summary>
/// Get result form all output
/// </summary>
/// <param name="output"></param>
/// <param name="image"></param>
/// <param name="threshold"></param>
/// <param name="nmsThreshold">threshold for nms</param>
/// <param name="nms">Enable Non-maximum suppression or not</param>
private static void GetResult(IEnumerable<Mat> output, Mat image, float threshold, float nmsThreshold, bool nms = true)
{
//for nms
var classIds = new List<int>();
var confidences = new List<float>();
var probabilities = new List<float>();
var boxes = new List<Rect2d>();
var w = image.Width;
var h = image.Height;
/*
YOLO3 COCO trainval output
0 1 : center 2 3 : w/h
4 : confidence 5 ~ 84 : class probability
*/
const int prefix = 5; //skip 0~4
foreach (var prob in output)
{
for (var i = 0; i < prob.Rows; i++)
{
var confidence = prob.At<float>(i, 4);
if (confidence > threshold)
{
//get classes probability
OpenCvSharp.Point max;
OpenCvSharp.Point minLoc;
Cv2.MinMaxLoc(prob.Row[i].ColRange(prefix, prob.Cols), out minLoc, out max);
var classes = max.X;
var probability = prob.At<float>(i, classes + prefix);
if (probability > threshold) //more accuracy, you can cancel it
{
//get center and width/height
var centerX = prob.At<float>(i, 0) * w;
var centerY = prob.At<float>(i, 1) * h;
var width = prob.At<float>(i, 2) * w;
var height = prob.At<float>(i, 3) * h;
if (!nms)
{
// draw result (if don't use NMSBoxes)
Draw(image, classes, confidence, probability, centerX, centerY, width, height);
continue;
}
//put data to list for NMSBoxes
classIds.Add(classes);
confidences.Add(confidence);
probabilities.Add(probability);
boxes.Add(new Rect2d(centerX, centerY, width, height));
}
}
}
}
if (!nms) return;
//using non-maximum suppression to reduce overlapping low confidence box
int[] indices;
CvDnn.NMSBoxes(boxes, confidences, threshold, nmsThreshold, out indices);
Console.WriteLine("NMSBoxes drop {" + (confidences.Count - indices.Length) + "} overlapping result.");
foreach (var i in indices)
{
var box = boxes[i];
Draw(image, classIds[i], confidences[i], probabilities[i], box.X, box.Y, box.Width, box.Height);
}
}
/// <summary>
/// Draw result to image
/// </summary>
/// <param name="image"></param>
/// <param name="classes"></param>
/// <param name="confidence"></param>
/// <param name="probability"></param>
/// <param name="centerX"></param>
/// <param name="centerY"></param>
/// <param name="width"></param>
/// <param name="height"></param>
private static void Draw(Mat image, int classes, float confidence, float probability, double centerX, double centerY, double width, double height)
{
//label formating
var label = Labels[classes] + " " + (probability * 100).ToString("0.00") + "%";
Console.WriteLine("confidence " + (confidence * 100).ToString("0.00") + "% " + label);
var x1 = (centerX - width / 2) < 0 ? 0 : centerX - width / 2; //avoid left side over edge
//draw result
image.Rectangle(new OpenCvSharp.Point(x1, centerY - height / 2), new OpenCvSharp.Point(centerX + width / 2, centerY + height / 2), Colors[classes], 2);
int baseline;
var textSize = Cv2.GetTextSize(label, HersheyFonts.HersheyTriplex, 0.5, 1, out baseline);
Cv2.Rectangle(image, new Rect(new OpenCvSharp.Point(x1, centerY - height / 2 - textSize.Height - baseline),
new OpenCvSharp.Size(textSize.Width, textSize.Height + baseline)), Colors[classes], Cv2.FILLED);
var textColor = Cv2.Mean(Colors[classes]).Val0 < 70 ? Scalar.White : Scalar.Black;
Cv2.PutText(image, label, new OpenCvSharp.Point(x1, centerY - height / 2 - baseline), HersheyFonts.HersheyTriplex, 0.5, textColor);
}
private string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.tiff;*.png";
Bitmap bmp;
private void button2_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
var imagebyte = File.ReadAllBytes(ofd.FileName);
bmp = new Bitmap(new MemoryStream(imagebyte));
pictureBox1.Image = bmp;
}
}
}Demo下载
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |