

基于贝叶斯的贪婪算法与状态交换来分布式地解决无人机协调巡逻问题附论文和matlab代码
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
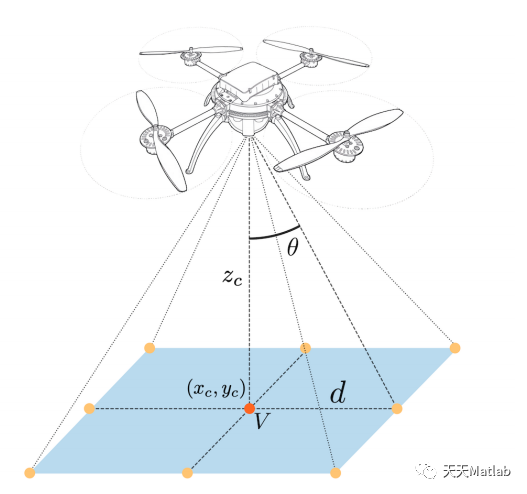
多摄像头监控系统已成为许多领域的现代趋势,无论是用于研究还是工业。这些系统越来越被用于增强公共场所(如公园、机场和银行)以及政府和军事设施等受限区域的安全性。此外,将摄像头安装在无人机上可以将这些监控系统的能力提升到一个全新的水平。事实上,飞行摄像头的使用可以大大增加网络的可重构性,并为环境提供新的视角和更广泛的覆盖范围。
项目摘要
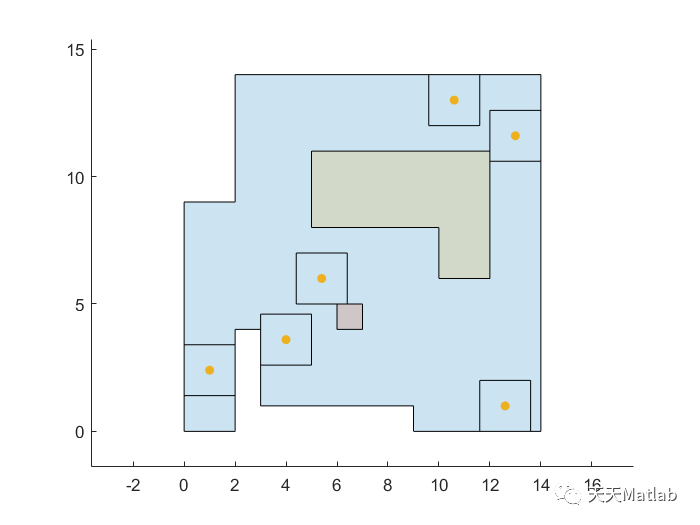
该项目旨在通过多个无人机载摄像头从顶部视角在已知环境中找到交互式监控问题的可能解决方案。采用基于贝叶斯的贪婪算法与状态交换来分布式地解决协调巡逻问题。将该策略的结果与通过线性规划获得的受限环境中的最佳路径进行比较。此外,还在大型环境中评估整体性能,其中最佳问题变得不可行。利用卡尔曼理论实施智能目标跟踪算法,该算法具有针对目标约束和信息损失最小化的摄像头变焦控制优化。进行了几次模拟,跟踪具有不同轨迹模型的目标,并改变滤波器的采样频率和检测的准确性。最后,对该算法对测量误差和摄像头故障的鲁棒性进行了测试。
📣 部分代码
%% Parameters
load('Data/C.mat') % load desired environment
env = C; % rename selected environment
Ts = 5; % setteling time for P before starting zoom
theta = 40; % angle (1m^2 from 2m)
gamma = 12; % trade off parameter
eFoV = 0.05; % percentage error of view
err = 0.05; % measure loss percentage
sigma_P = 0.25; % kalman prediction error sd
% Generate Camera
cam = Camera(env,theta,1,0,eFoV);
%% Coverage Factor Analysis
tx = 0:0.00001:1; % Real Uncertainty
ts = tinv((tx+1)/2,inf); % Real Coverage factors
% Approximated Uncertainty
u = @(k,beta) (1-exp(-k/beta));
% Interest Zone
lb = logical(ts >= 2);
hb = logical(ts <= 3);
bound = logical(lb.*hb);
% Cost Function
u0 = @(beta) norm((tx(bound)-u(ts(bound),beta)));
% Solve
beta = fmincon(u0,0.5,[],[],[],[],0,1);
figure()
plot(ts,tx)
hold on
plot(ts,u(ts,beta))
xlim([0 3.5])
%% Trade-off Parameter Analysis
% Gamma Test
y = [];
t = 1:5:100;
for g = t
[z,k] = cam.optimalZoom(g,sigma_P);
x = [z;k];
y = [y x];
end
figure()
plot(t,y(1,:))
hold on
plot(t,y(2,:))
% sigma_P Test
y = [];
t = 0.05:0.005:0.55;
for sigma_p = t
[z,k] = cam.optimalZoom(gamma,sigma_p);
x = [z;k];
y = [y x];
end
figure()
plot(t,y(1,:))
hold on
plot(t,y(2,:))⛳️ 运行结果
🔗 参考文献
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码、论文复现、期刊合作、论文辅导及科研仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
2.图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
3 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
4 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化
5 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
6 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
7 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
8 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
9 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |