

「自控元件及线路」11.1 编码器 (码盘)
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
本节介绍增量式、绝对式、混合式编码器的结构及原理
文章目录
一些精密仪器和电子设备需要检测其运动状态除了前面提到的旋转变压器以外还有更加精密的选择编码器和光栅
编码器
编码器俗称码盘是机械与电子结合的精密测量器件。一般用于检测旋转角度、移动距离和旋转或移动的速度。
其工作原理是将信息刻在码盘上通过光电原理或电磁原理将码盘的机械转角转换成脉冲或数字形式输出。
根据其结构和原理可以分为
- 旋转式、直线式
- 接触式、光电式、电磁式
根据输出信号的基本形式可以分为
- 增量式机械角->周期性电信号->计数脉冲。通过脉冲个数表示位移大小
- 绝对式机械角->数字码。通过数字码识别当前所处的位置
增量式码盘
原理
光电式编码器一般由透镜、码盘、光敏元件和放大整形电路组成。
对于增量式编码器还有光阑板。
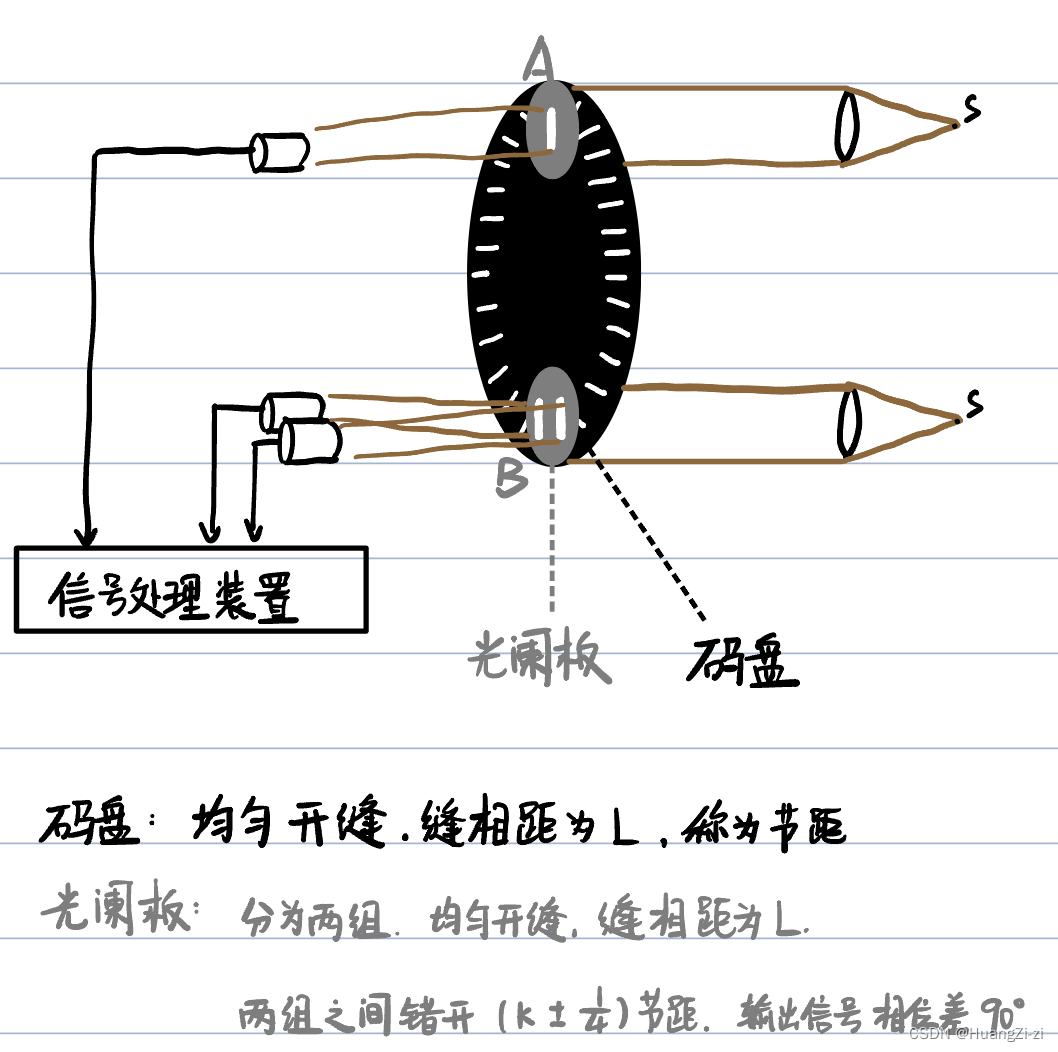
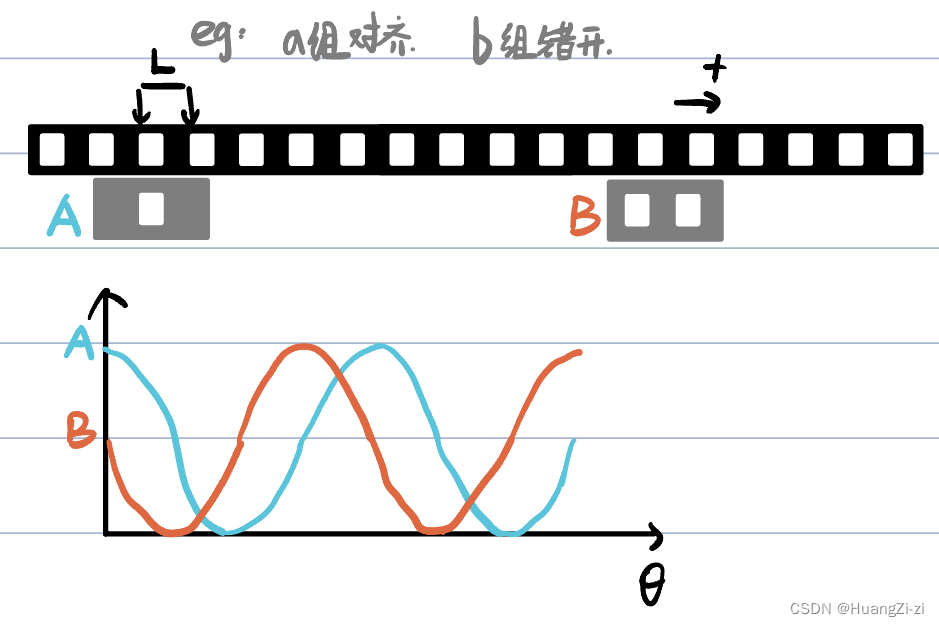
光线穿过码盘窄缝和光阑板窄缝照射到光电传感器上。当码盘转动时光强随转角周期性变化每转过一个节距L为一个周期。取光电传感器输出信号的基波则可以用正弦信号来表示光电传感器的输出。
根据两组光阑板产生相位差为90度的两路信号经过逻辑电路处理后就可以判别转动方向。进一步处理可以得到转角和转速。
假设编码器如上图信号处理的原理
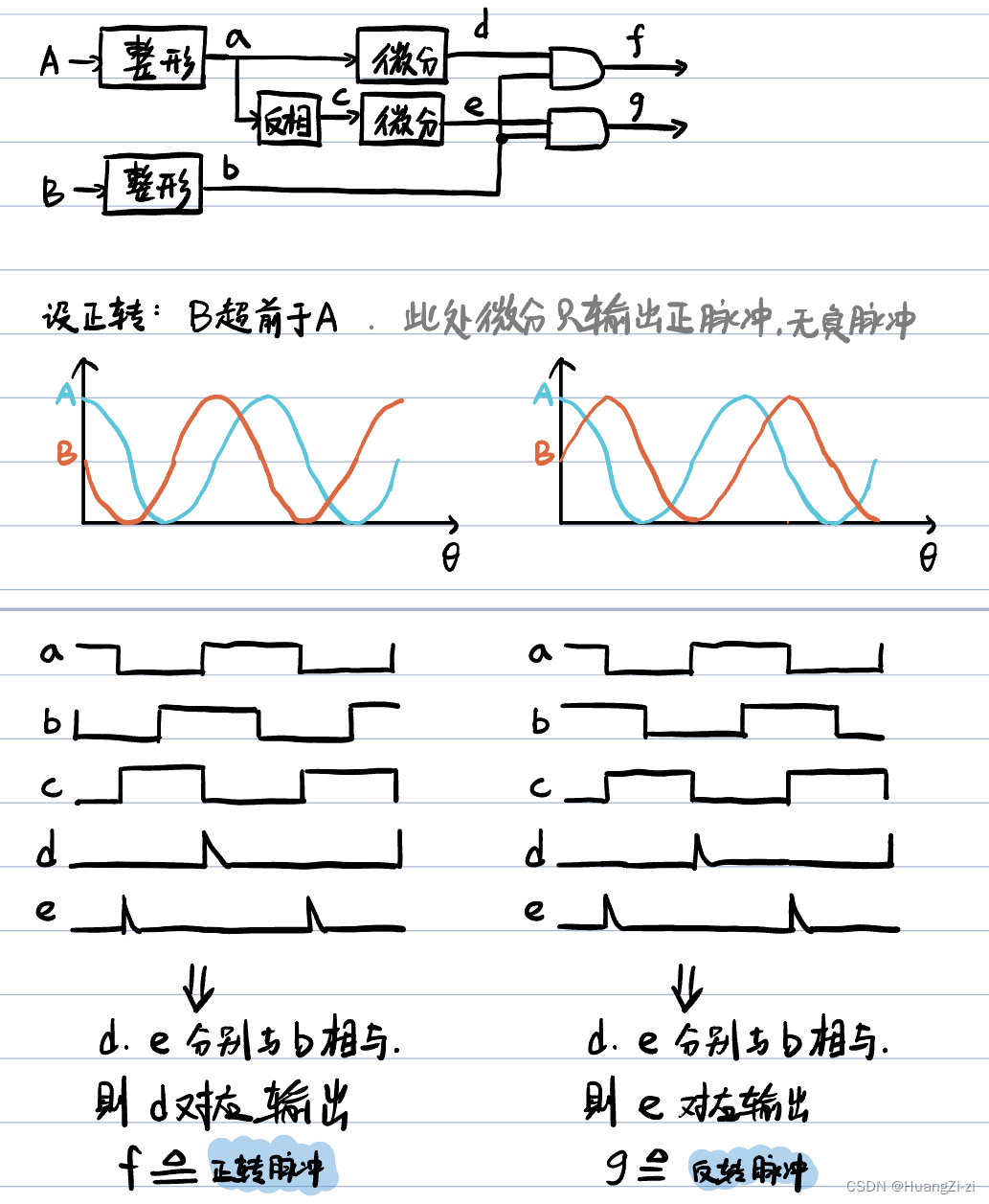
首先将光电传感器输出信号进行整形变为01逻辑信号。以B组光栅信号为基准如果正转则b高电平区间a从0变1如果反转则b高电平区间a从1变0。可以利用反相、微分、取与的逻辑运算分出正转脉冲和反转脉冲。
每输出一个脉冲表示码盘转过了一个节距对应一个固定的角度。将正、反转脉冲送入可逆计数器的加、减计数端求得脉冲数 N N N每个脉冲对应角度增量 Δ \Delta Δ则角位移增量 N Δ N\Delta NΔ
寻零
但光输出角度增量是不够的如果想要输出角位置还必须事先规定一个零位也称基准零点、绝对位置。
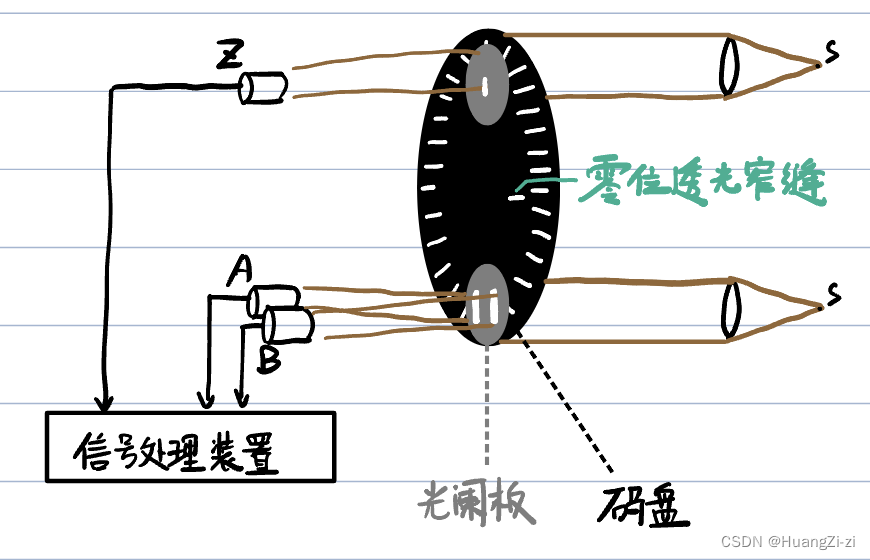
对于这个零位有单独的一条透光狭缝并有对应的输出Z。
再回过来看这个结构图实际上A B两组光阑板是刻在一起的另一个光阑板是为寻零准备的其对应的码盘上的狭缝也与A B不同。之前的画法是为了解释原理方便。
转角不受限时向一个方向转在一圈之内一定可以得到零位脉冲。
转角受限时先向一个方向转如果到达限位处仍未得到零位脉冲则反转。在另一处限位之前一定可以得到零位脉冲。如果得不到说明设计或者装配有问题
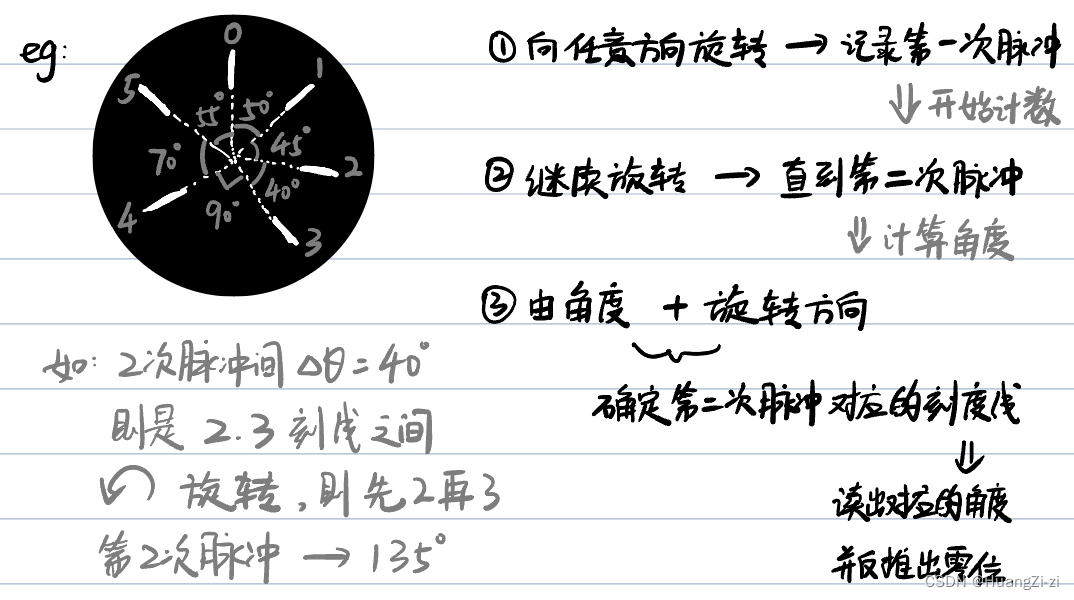
更快速的寻零方法
刻多条零位刻线不等距分布。读取两个相邻零位脉冲之间的正反转脉冲数结合对应的旋转方向、角度即可计算出绝对零位。
分辨率与倍频电路
一个脉冲对应的转角 表示码盘的分辨率和静态误差
Δ
θ
=
360
°
每转脉冲数
\Delta\theta\displaystyle = \frac{360\degree}{每转脉冲数}
Δθ=每转脉冲数360°
由此可知码盘的分辨率首先取决的那盘旋转一圈所产生的脉冲数码盘窄缝越多分辨率和精度就越高但相应的码盘直径也越大造价越高
在不增加码盘窄缝数量的情况下提高码盘分辨率可以使用倍频电路(也称电子细分电路)
例如四分频电路逻辑图


使用四分频计数脉冲频率提高四倍步距减小为原来的1/4
如果信号足够接近正余弦波形可以调整整形电路的跳变电压来得到更高的分频进一步提高测量精度
总结
- 每输出一个脉冲信号对应转过一个固定角度通过统计脉冲信号的数量来计算旋转的角度因此编码器输出的位置数据是固定的。
「也就是这个角度的整数倍而不能出现非整数倍」 - 采用固定脉冲信号旋转角度的起始位置可以任意设定
「也就是每个脉冲对应的旋转角度恒定不管零位窄缝在哪里不影响使用」 - 采用相对编码若旋转角度数据丢失需要重新定位(寻零)
「也就是在不知道零位时输出的脉冲只能用来测速。必须搭配零位才能计算出角度」
优点
- 精度高且可通过倍频电路进一步提高
- 结构简单成本较低
- 既可测角也可测速
- 无接触式测量可靠性高、寿命长
缺点
- 开机后必须寻零
- 误差不会自行消除。若由于干扰而丢失脉冲或窜入脉冲将产生累计误差
- 需要计数器、速度有一定限制
绝对值码盘
也叫绝对式编码器。以数码的形式输出信号用来表示某一个绝对位置。根据起点和终点的绝对位置之差可以运算出位移量。
原理
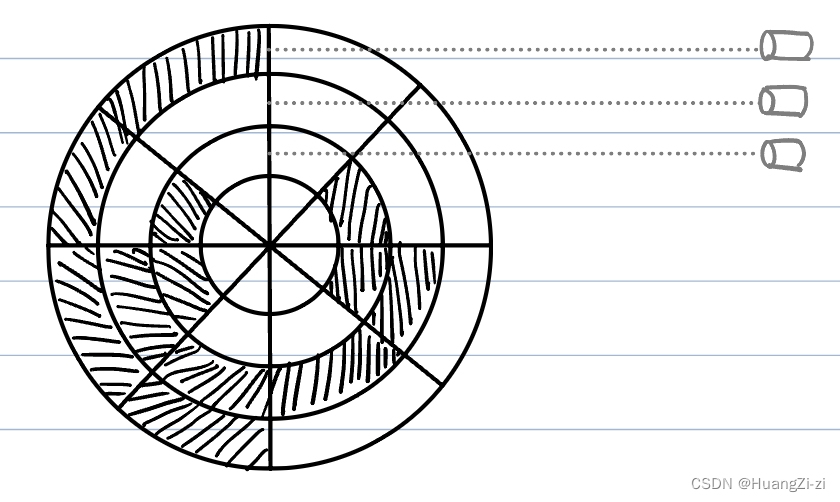
绝对式编码器由码盘、光源、光敏元件组成。
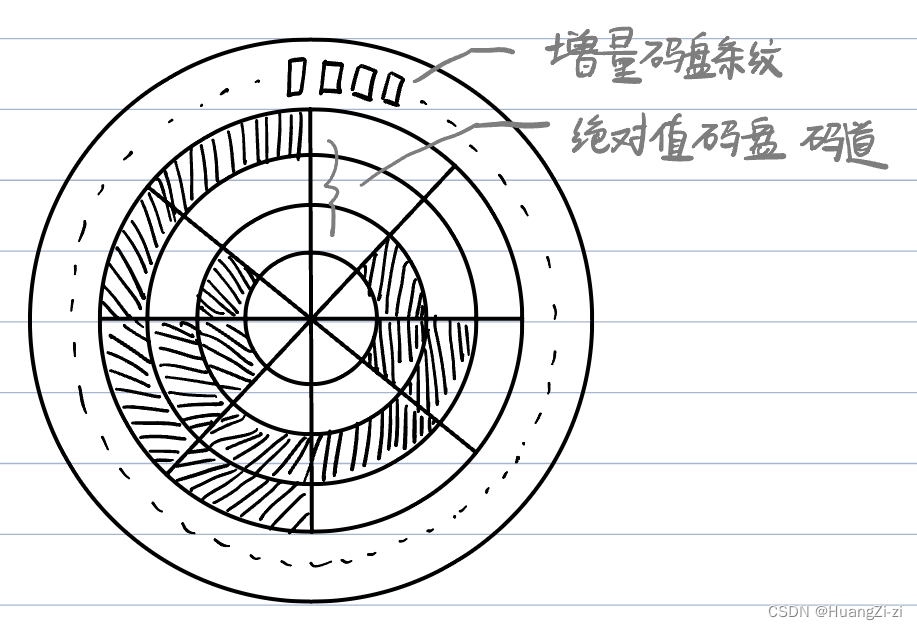
码盘按照扇形分区扇形上有一系列同心圆的光学码道。每个码道按照一定的编码规律分为透明和不透明的区域。
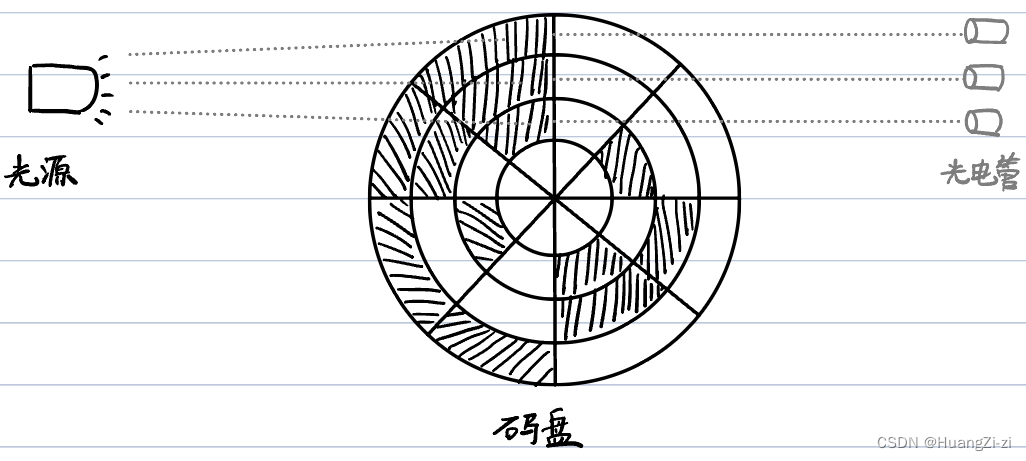
当光源的光透过码盘被接收则输出1
当光源的光被码盘遮挡则输出0
那么每一个扇形的分区就对应了一个二进制的编码而每一个编码又对应了一个转角因此读出各个码道输出的编码组合就可以表示出码盘所在的位置。
如上图采用二进制编码。有几个码道二进制就有几位
用
N
N
N表示码道数目则角度分辨率
Δ
θ
=
360
°
/
2
N
\Delta \theta=360\degree/2^N
Δθ=360°/2N
编码改进
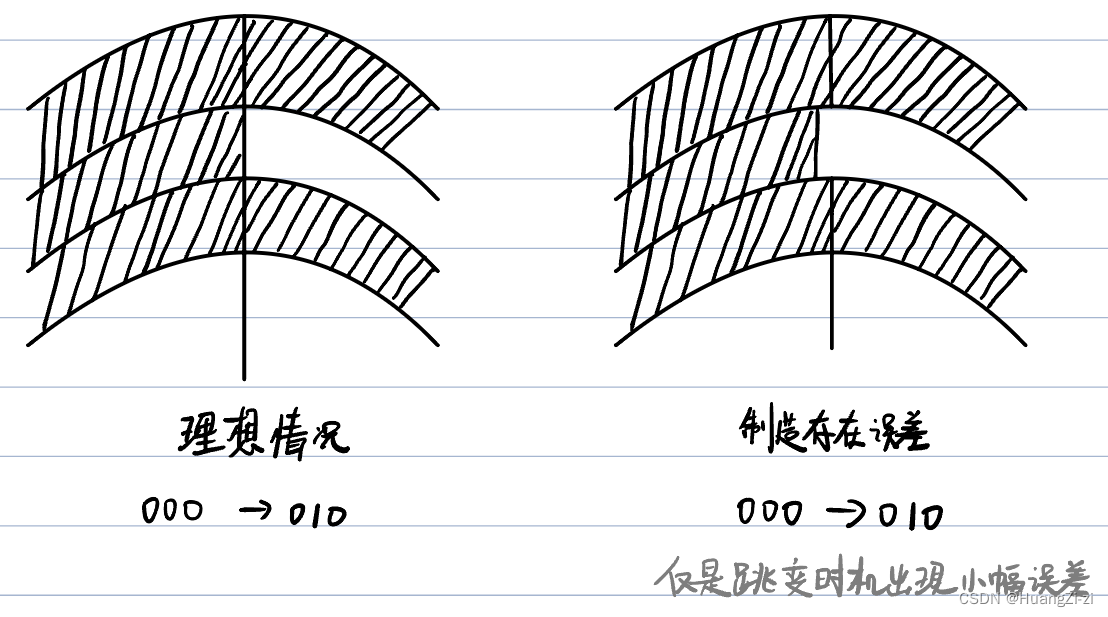
采用二进制编码会存在0000->1111之类的大幅度跳变如果制造精度不够就有可能出现各种干扰项

也就是在短时间内输出的角度值会发生多次跳变造成很大的误差
为了解决这个问题采用循环码编码也称格雷码
相邻的格雷码只有一位不同因此即使制造过程中存在误差也不会引入其他的信号不会造成大幅度跳变的误差。
总结
优点
- 精度高、无接触、寿命长
- 不需要寻零从输出数码可直接获得角度信号
- 没有累计误差即使某一次数码信号受到干扰下一次仍能输出正确的数码。
- 不需要计数器、允许转速高
缺点
- 结构复杂体积大
- 价格贵
混合式码盘
是一种新型绝对值码盘但同时含有增量码盘的结构。
绝对值码盘码道较少精度较低起粗测作用增量码盘部分起精测作用
其优点
- 输出模拟信号抗干扰能力优于脉冲信号
- 通电即可读取绝对位置不必寻零
- 采用增量码盘结构可以对输出信号进行倍频进一步提高精度
- 相比与同精度的绝对值码盘体积更小