一文搞懂go并发编程设计原理
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
前言
主要学习其设计原则大体流程权衡利弊
不要纠结于部分难懂的实现细节因为不同的人对相同接口的实现细节不一样就算是相同的人实现两次也可能不一样
context
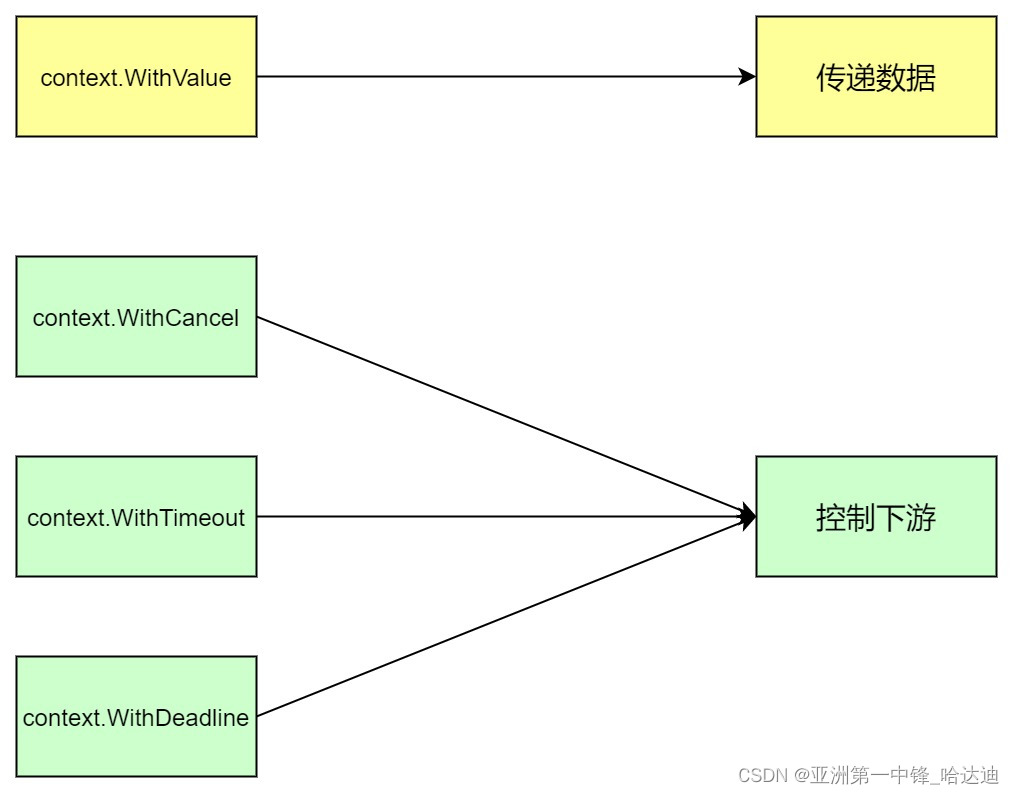
context的作用主要有两个
-
在整个请求的执行过程中传递一些业务无关的数据例如userIdlogId避免所有方法都要加这些参数
- 其他语言例如java用过ThreadLocal实现该功能
-
控制整个链路的取消超时
-
一般将context.Context作为方法的第一个参数就算现阶段用不着也建议加上减少后期代码修改。除非明确知道不需要context的功能例如utilhelper包下的工具方法
-
context不应该作为结构体的字段
- context代表一个请求上下文只应该在该请求的生命周期内被使用
- 如果放到结构体里请求的生命周期结束后还能访问该ctx违背了context的设计原则除非这个结构体的生命周期和请求相同例如http.Request
valueCtx
通过funcWithValue(parent Context, key, val any) Context可以向ctx中并发安全地设置一个键值对
-
为什么需要并发安全
- ctx可以在不同goroutine之间传递如果不同goroutine同时往ctx中读写数据就会有并发问题
-
如果我们来设计会如何实现
- map不是并发安全
- sync.Map可以满足要求但go没有这么做
go通过创建新context来实现
func WithValue(parent Context, key, val any) Context {
if parent == nil {
panic("cannot create context from nil parent")
}
if key == nil {
panic("nil key")
}
if !reflectlite.TypeOf(key).Comparable() {
panic("key is not comparable")
}
// 创建新context
return &valueCtx{parent, key, val}
}
```go
例如下面的例子会构造出很多层context
func main() {
ctx := context.TODO()
ctxa := context.WithValue(ctx, “a”, “aa”)
ctxb := context.WithValue(ctxa, “b”, “bb”)
ctxc := context.WithValue(ctxb, “c”, “cc”)
}

查找value就是先看自己的key是否和参数相同如果相同返回自己的value否则去父节点找
```go
func (c *valueCtx) Value(key any) any {
if c.key == key {
return c.val
}
return value(c.Context, key)
}
注意事项
-
父context无法获取子context设置的kv
-
因为从父contetx向上的路径中无法找到子context设置的kv
-
当然可以可以绕开这个限制父context放个map进去这样子context对该map的修改父也能看到
- 不推荐因为违反了ctx中数据不可变的特性
-
-
如果父的链条中有两个节点的key相同会返回离自己最近的节点的value
设计要点
-
为什么不用map存储而是用类似链表的方式存储数据
- context的设计理念是不可变
-
为什么链表方式串联数据是并发安全的因为其巧妙地使用了子节点指向父节点的串联方式
- 读当一个context创建好后从自己往父的链表是固定的无法被修改
- 写将自己追加到一个链表中这个操作只会在各自的goroutine中进行
-
用链表存储数据的优劣势
- 优势实现简单不用加锁就能实现并发 安全
- 劣势层级较多时性能较低因此gin.Context采用map来实现
cancelCtx
通过funcWithCancel(parent Context) (ctx Context, cancel CancelFunc)
创建出可以取消的ctx
type cancelCtx struct {
Context
mu sync.Mutex
// 一个channel当能从channel读取数据时表示该context被关闭
done atomic.Value
// 维护子context本context被关闭时同时会关闭子的
children map[canceler]struct{}
err error
}
当调用WithCancel返回的cancel方法时可以取消所有监听该ctx和子ctx的goroutine
- 并不是调用了cancel就会平白无故地取消子goroutine需要在子goroutine里需要配合监听ctx.Done
func main() {
ctx := context.TODO()
cancelCtx, cancel := context.WithCancel(ctx)
defer cancel()
go func() {
for {
<-cancelCtx.Done()
// 被上游取消结束业务处理
return
/**
业务处理
*/
}
}()
/**
业务处理
*/
}
设计要点
-
创建cancelCtx时核心是找到最近的cancelCtx类型的祖先将自己加到该祖先的children里面这样祖先被cancel时自己也会被cancel达到级联取消的效果
-
如果找不到就新起一个goroutine监听父的done信号和自己的done信号
-
go func() { select { case <-parent.Done(): child.cancel(false, parent.Err()) case <-child.Done(): } }() - 为什么要监听父的done信号因为无法加到父的children字段里只能通过监听父的done信号来达到级联取消的效果
- 为什么要监听自己的如果自己比父早被取消该gouroutine也可以退出
-
-
如果父没有done信号说明父永远不会被取消什么也不用监听
- 这样只有在cancel方法被调用时才会取消
Done方法用一个双重检测的方式确保c.done只被初始化一次
如果第一次不检测在功能上完全没有问题但原子操作比加锁快性能更好
func (c *cancelCtx) Done() <-chan struct{} {
d := c.done.Load()
// 第一次检测
if d != nil {
return d.(chan struct{})
}
c.mu.Lock()
defer c.mu.Unlock()
d = c.done.Load()
// 第二次检测
if d == nil {
d = make(chan struct{})
c.done.Store(d)
}
return d.(chan struct{})
}
cancel方法主要干了两件事
- 关闭自己的done
close(done) - 遍历children挨个调用child的cancel方法
timerCtx
通过funcWithDeadline(parent Context, d time.Time) (Context, CancelFunc)
可以创建一个带超时控制的ctx
WithTimeout底层调的
WithDeadline两者本质上一样
timerCtx用装饰器模式在cancelCtx上增加了超时的功能
用 time.AfterFunc开启计时器时间到了执行cancel方法
c.timer = time.AfterFunc(dur, func() {
c.cancel(true, DeadlineExceeded)
})
设计要点
-
如果parent也是timerCtx且parent的过期时间比当前ctx的过期时间早就只创建一个cancelCtx避免开启定时器的开销
- 为什么因为parent时间到被cancel时自己时间没到因此自己的定时器一定不会被触发还不如不创建
sync.Mutex和sync.RWMutex
用于保护需要被保护的资源
-
哪些资源需要被保护
- 可能被多个goroutine同时读写
-
哪些资源不需要被保护
- 只在单个goroutine中操作
- 多个goroutine只读该资源
封装模式
如果一个资源需要被保护则需要暴露出被封装的方法而不是将资源和锁都暴露出去让用户自己考虑要不要加锁怎么加锁
错误使用
var Resource map[string]interface{}
var ResourceLock sync.Mutex
正确使用
// 包私有
var resource map[string]interface{}
var resourceLock sync.Mutex
// 封装Get
func GetResource(key string) interface{} {
resourceLock.Lock()
defer resourceLock.Unlock()
return resource[key]
}
// 封装Set
func SetResource(key string, value interface{}) {
resourceLock.Lock()
defer resourceLock.Unlock()
resource[key] = value
}
这样保证对resource的使用不会出错也体现封装的设计模式
双重检测
对于check and do模式一般采用双重检测的模式进行操作即
- 加读锁
- 执行check如果不满足要求直接返回
- 释放读锁
- 如果满足要求加写锁
- 再check一次如果还满足要求执行do
例如要对一个map实现LoadAndStore功能如果某个key存在就返回对应的value否则插入kv
type SafeMap struct {
data map[string]interface{}
lock sync.RWMutex
}
func (m *SafeMap) LoadAndStore(key string, value interface{}) (interface{}, bool) {
m.lock.RLock()
// 第一次check
oldVal, ok := m.data[key]
m.lock.Unlock()
if ok {
return oldVal, true
}
m.lock.Lock()
defer m.lock.Unlock()
// 第二次check
oldVal, ok = m.data[key]
if ok {
return value, true
}
m.data[key] = value
return value, false
}
-
第一次check能不能不要
- 第一次check其实可以不要不会影响流程的正确性但在读多写少的场景下先加读锁check一次的性能更高
-
为什么需要加写锁后再check一次
- 因此释放读锁后可能其他goroutine已经插进来执行了do操作如果这里不再检测一次就会在check不成功的情况执行do操作不满足check and do的语义
读优先和写优先
读写锁中有读优先和写优先两种模式
- 读优先已经有写锁在等待的情况下还能成功加读锁
- 写优先已经有写锁在等待的情况下不能再加读锁这样当之前的读锁都释放后写锁就能加成功
一般的语言例如go都是是写优先防止写饥饿
Mutex原理
加锁流程
mutex的结构如下
type Mutex struct {
state int32
sema uint32
}
- state是锁的核心状态加锁就是将state修改为某个值
- sema用于阻塞唤醒goroutine
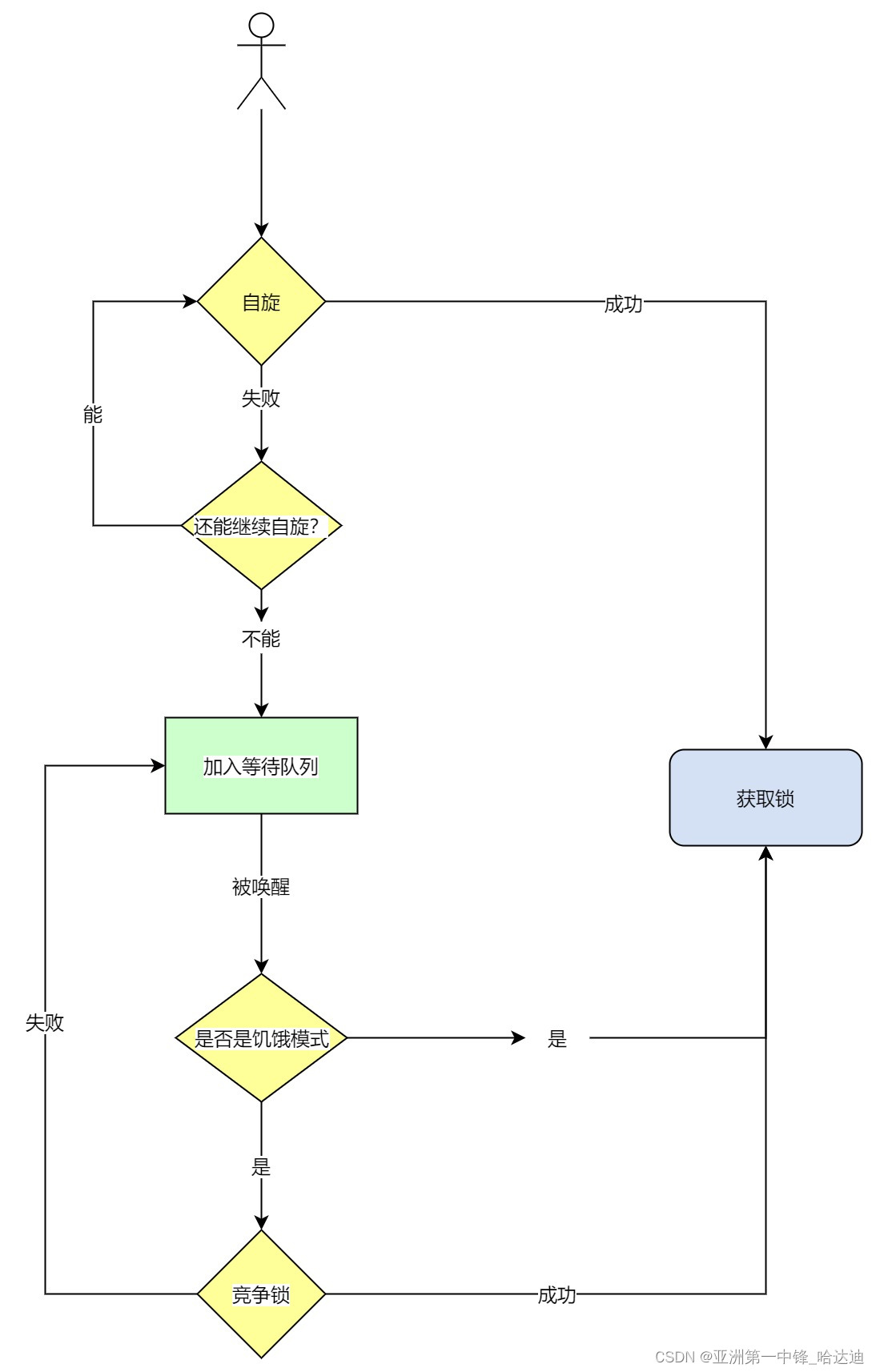
流程图中的要点
-
自旋分为快路径一次性的自旋和慢路劲多次自旋
-
快路径CAS将其从0改为加锁状态
-
慢路径什么情况下可以进行慢路径自旋
- 自旋次数小于4
- cpu核数大于1
- 至少存在1个其他运行的P
- P的本地队列为空
-
-
为什么有饥饿模式和正常模式
-
正常模式效率更高新来的goroutine可以和队列中的goroutine抢锁因为新来的已经占着cpu大概率能拿到锁。为什么效率更高避免了先阻塞进入队列在被唤醒执行的调度开销
-
饥饿模式保证公平防止饥饿新来的不能抢锁需要进入队列等待
-
什么情况下锁变为饥饿模式
- 某个goroutine等待超过1ms
-
什么情况退出饥饿模式
- 队列只剩下一个goroutine
- 等待时间小于1ms
-
注意事项
- 加锁和解锁需要成对出现推线使用defer解锁
- 锁都是不可重入的若需要重入功能需要自己封装
- 对于读多写少的场景使用
RWLock
sync.Pool
当需要缓存对象时可以使用sync.Pool
从pool中获取时会先看池中有没有如果没有创建新的对象
gc时pool会释放一部分资源
pool的优点
- 减少内存分配开销
- 内存分配少了gc 的压力也会变小
对象重置
当对象要被复用时需要重置掉对象的属性避免两个请求共用相同的用户数据
例如gin框架在从pool中取出gin.Context时先重置其属性再交给用户的方法使用
func (engine *Engine) ServeHTTP(w http.ResponseWriter, req *http.Request) {
c := engine.pool.Get().(*Context)
c.writermem.reset(w)
c.Request = req
// 重置属性
c.reset()
engine.handleHTTPRequest(c)
engine.pool.Put(c)
}
-
放回去之前重置还是取出来重置
- 放回去之前重置如果对象占用空间很大放回去之前重置能减少pool的内存占用
- 取出来重置如果对象占用空间不大则放回去之前重置的对象可能被gc回收导致白做工此时用取出来重置的方式比较好
pool原理
-
如果我们自己设计会怎么实现
- 首先考虑用一个channel来存放对象但这样放入获取都要加锁
- 全局锁性能不高那可以用分段锁的方式每个P一个队列用锁保护
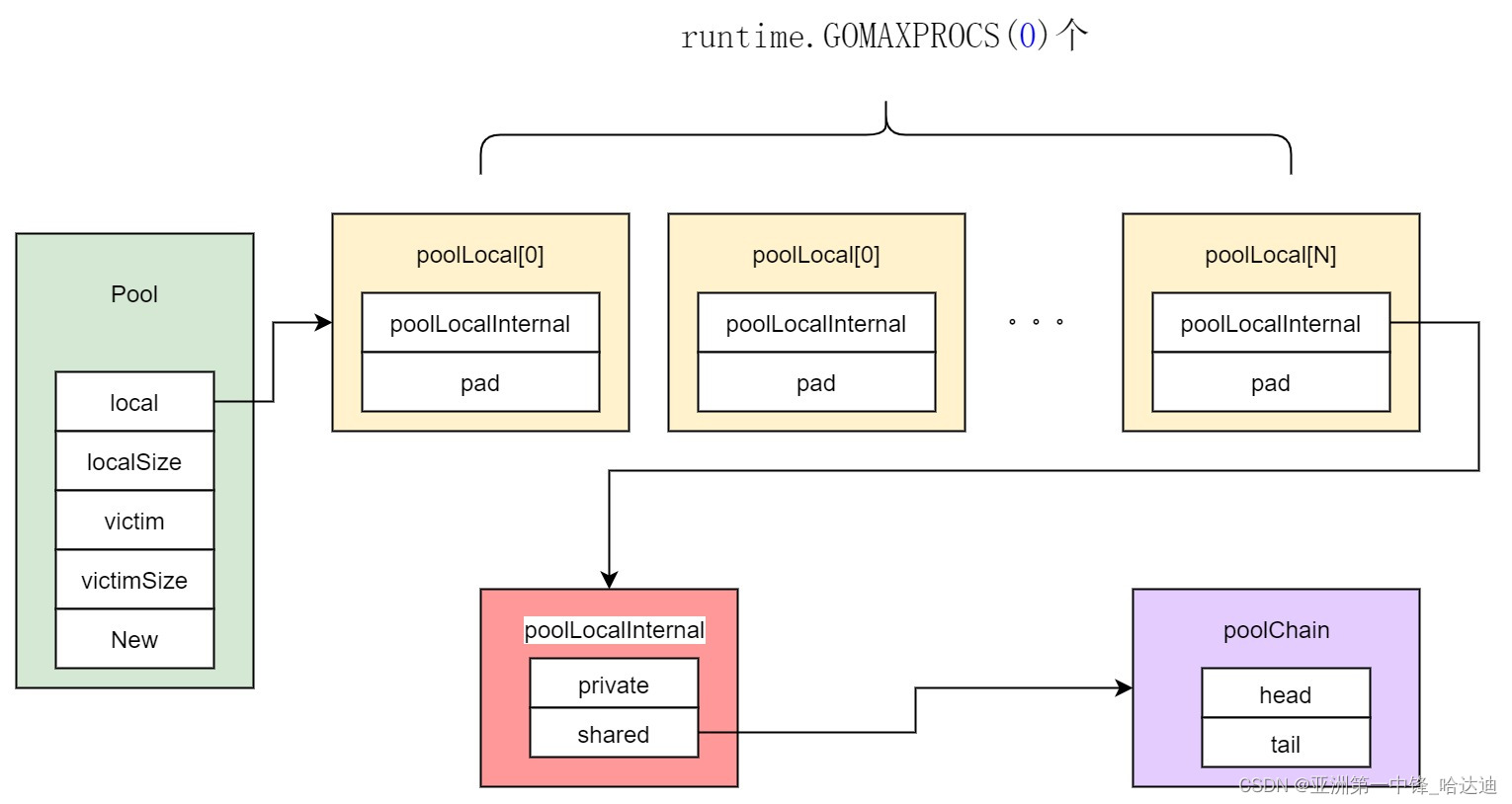
sync.Pool的实现原理
-
每个p有一个poolLocalInternal对象
-
poolLocalInternal包含
private和shared -
private只会被对应的p使用
- 也就是说往private放入数据从private获取数据都不需要加锁
-
shared指向poolChain
- poolChain从整体上来说是一个双向链表
- poolChain的每个节点poolDequeue都是一个循环数组
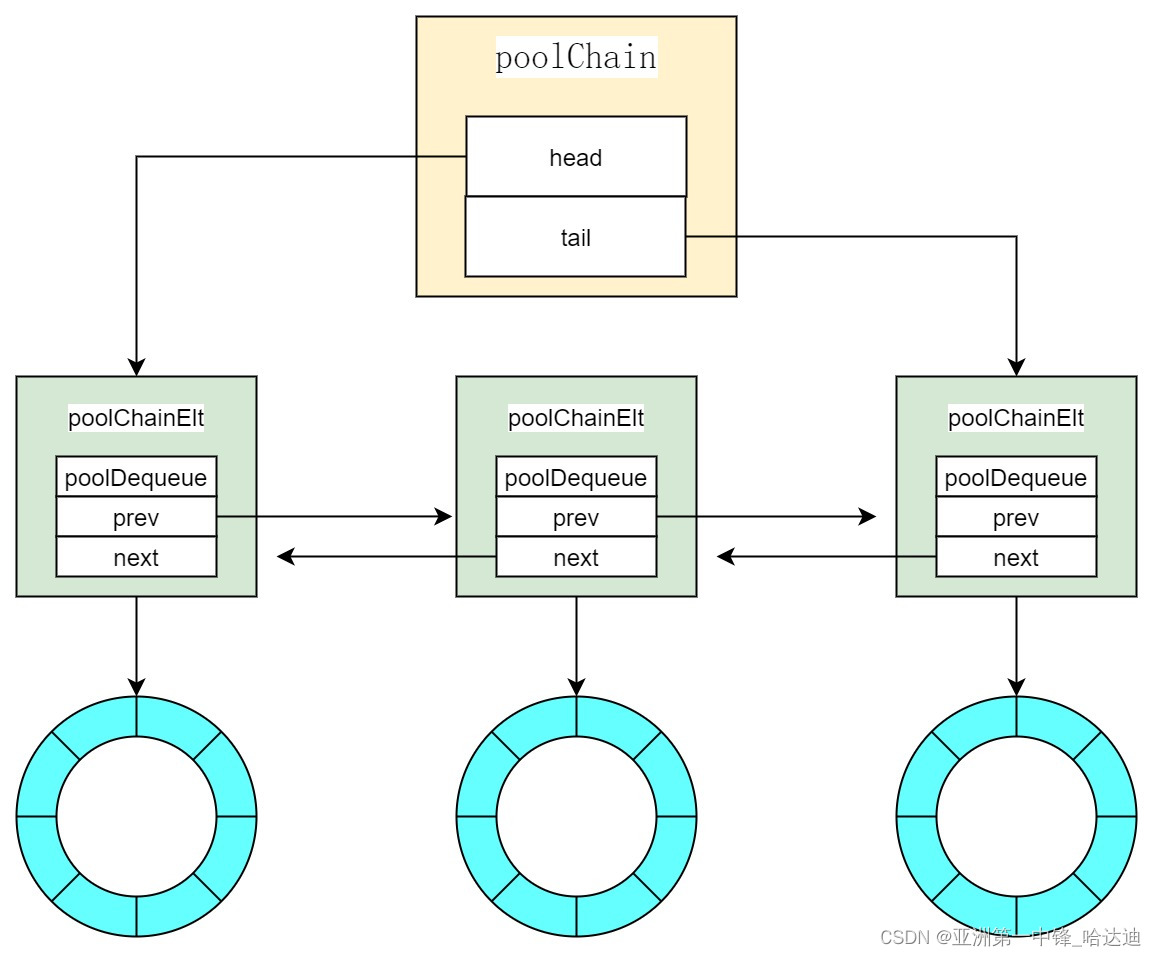
-
为什么poolDequeue设计成循环数组
- 即数组的优点一次性分配好内存对cpu 缓存友好
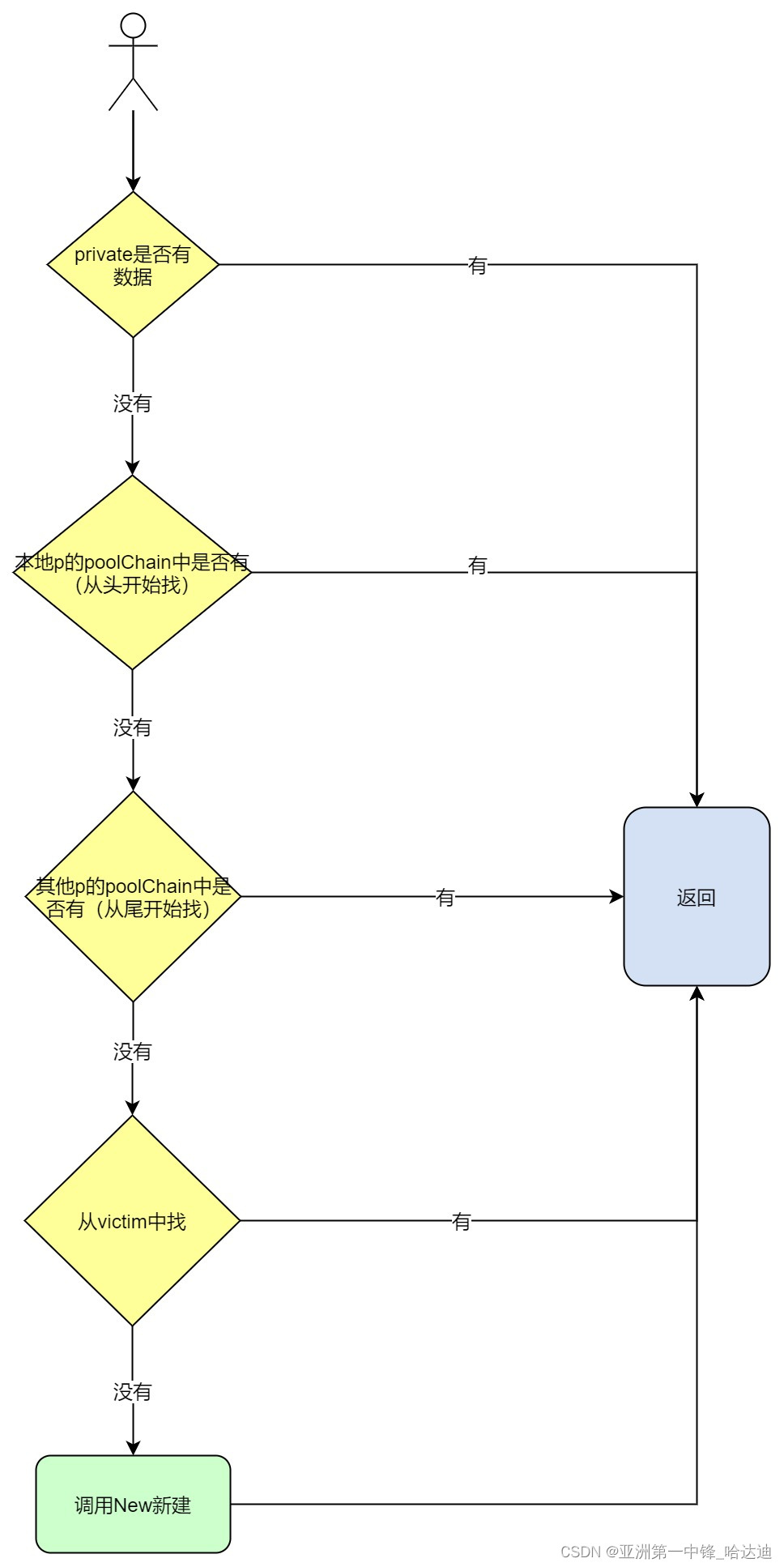
Get
Put
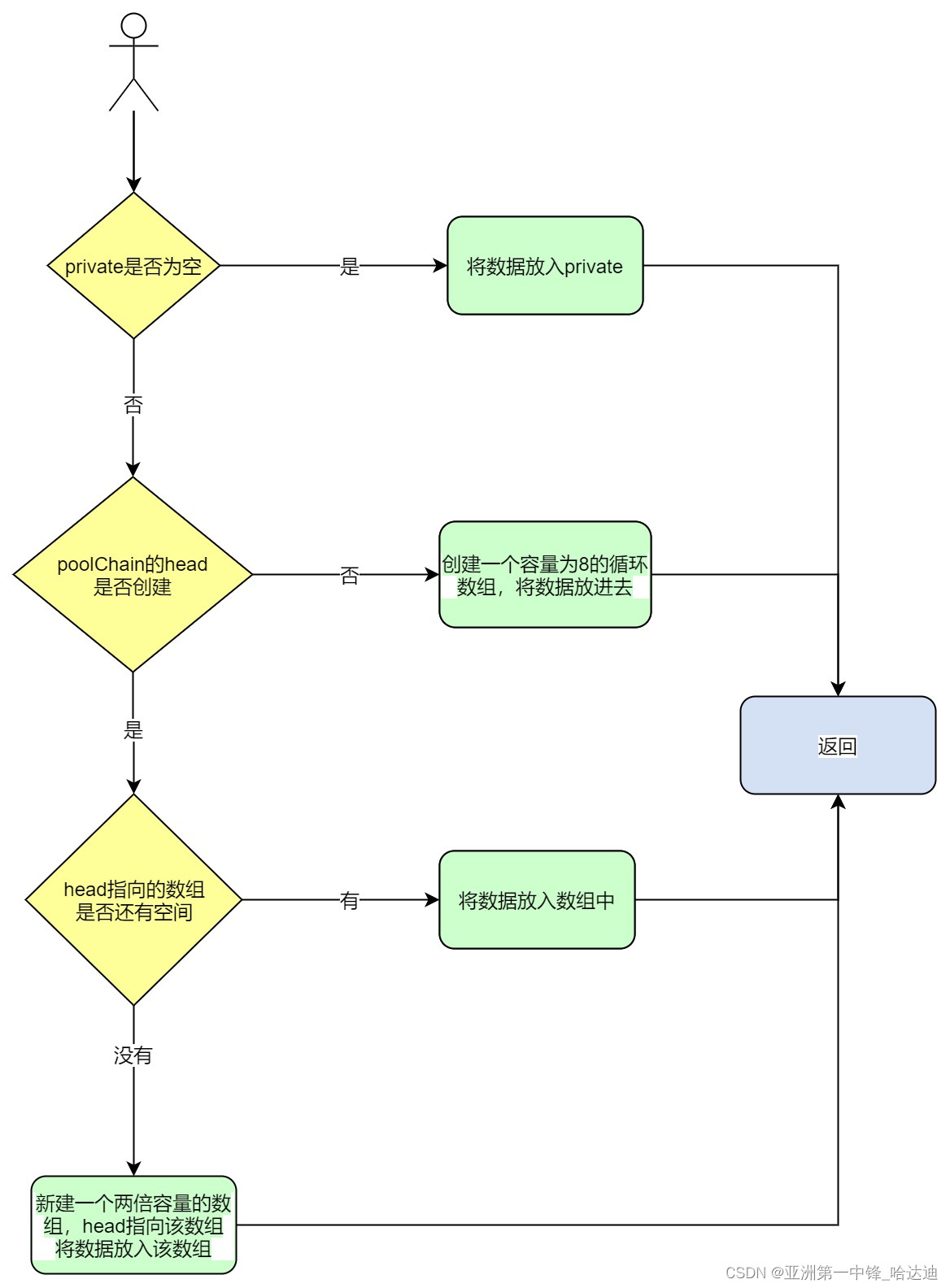
设计要点
-
为什么从队头放入数据从队尾获取数据
- 在分段锁的基础上进一步减少锁竞争的几率这样只有在同时操作一个双向链表的同一个节点时才会加锁
-
从victim中获取数据可以从private获取而偷取其他poolChain的数据可能需要加锁为什么可能需要加锁的优先级更高
- 因为sync.Pool希望victim中的数据被尽快回收只有在偷不到的情况下才尝试从victim中获取
注意事项
-
sync.Pool的容量设置和淘汰策略用户无法手动控制其中淘汰策略完全依赖gc
- gc每次触发都会把victim中的数据清空将正常数据放入victim
- 若需要手动控制容量可以用装饰器模式包装pool自己决定大对象不放入pool超过一定数量不放入
-
为什么需要victim而不是每次gc都把正常数据清空
- 防止性能抖动这样正常数据要经过两次gc才会被清空gingin
使用gin的框架的一个坑
如果在业务处理中需要开goroutine不能直接将gin.Context传给新的goroutine
如果直接传过去当本次请求结束后该ctx被复用时此时就有两个goroutine同时在使用该ctx
- 原先请求中新开的goroutineg1
- 新的业务请求goroutineg2
而g1需要使用的用户数据是原先请求的但当新业务请求到来时g2会给ctx设置新的用户数据
导致用户数据发生窜用
因此当需要在业务请求中开goroutine时需要调用Copy方法复制一份gin.Context
sync.WaitGroup
用于同步多个goroutine之间的工作
- Add(1)开启子任务state+1
- Done()结束子任务state-1
- Wait()阻塞等待直到所有子任务执行完毕
设计原理
WaitGrout其实需要保存3个信息
- 多少个子任务
- 多少个goroutine在等待
- 等待的goroutine阻塞在哪个队列上
type WaitGroup struct {
state1 uint64
state2 uint32
}
- state1高32位记录子任务个数低32位记录多少个goroutine在等待
- state2信号量用于挂起和唤醒等待的goroutine
Add流程
- 给state1高32位加deltadelta可以是负数
- 如果加完后高32位大于0还有其他子任务或者低32位等于0没有waiter返回
- 如果高32位等于0且低32位不等于0挨个唤醒waiter
Wait流程
- 如果高32位为0说明没有子任务直接返回
- 阻塞到队列上直到被Add唤醒
注意事项
需要注意state的+1和-1需要成对出现
- 加多了Wait的goroutine会永久阻塞
- 减多了直接panic
因此可以用errgroup来完成WaitGroup的功能因为其封装了对+1-1的操作保证一定成对出现
channel
导致goroutine泄露
channel使用不当时会导致goroutine泄露
- 只发送不接收该goroutine会一直等到有其他goroutine接收但一直没被接收
- 只接收不发送
- 读写nil的channel
实现原理
channel主要的结构有两个
-
存放缓存数据的队列
- channel用循环数组实现
-
存放发送接收的等待队列
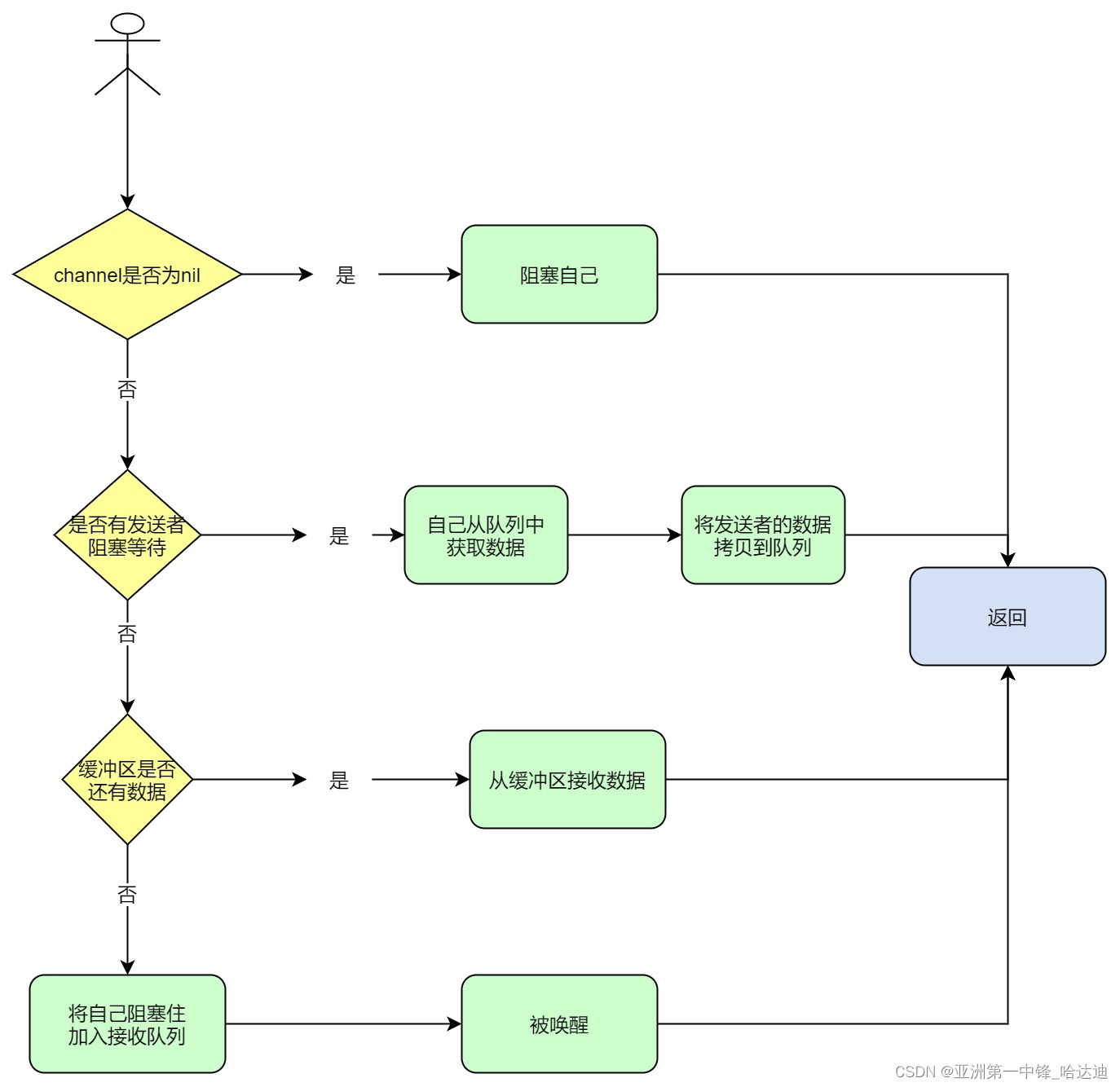
发送流程
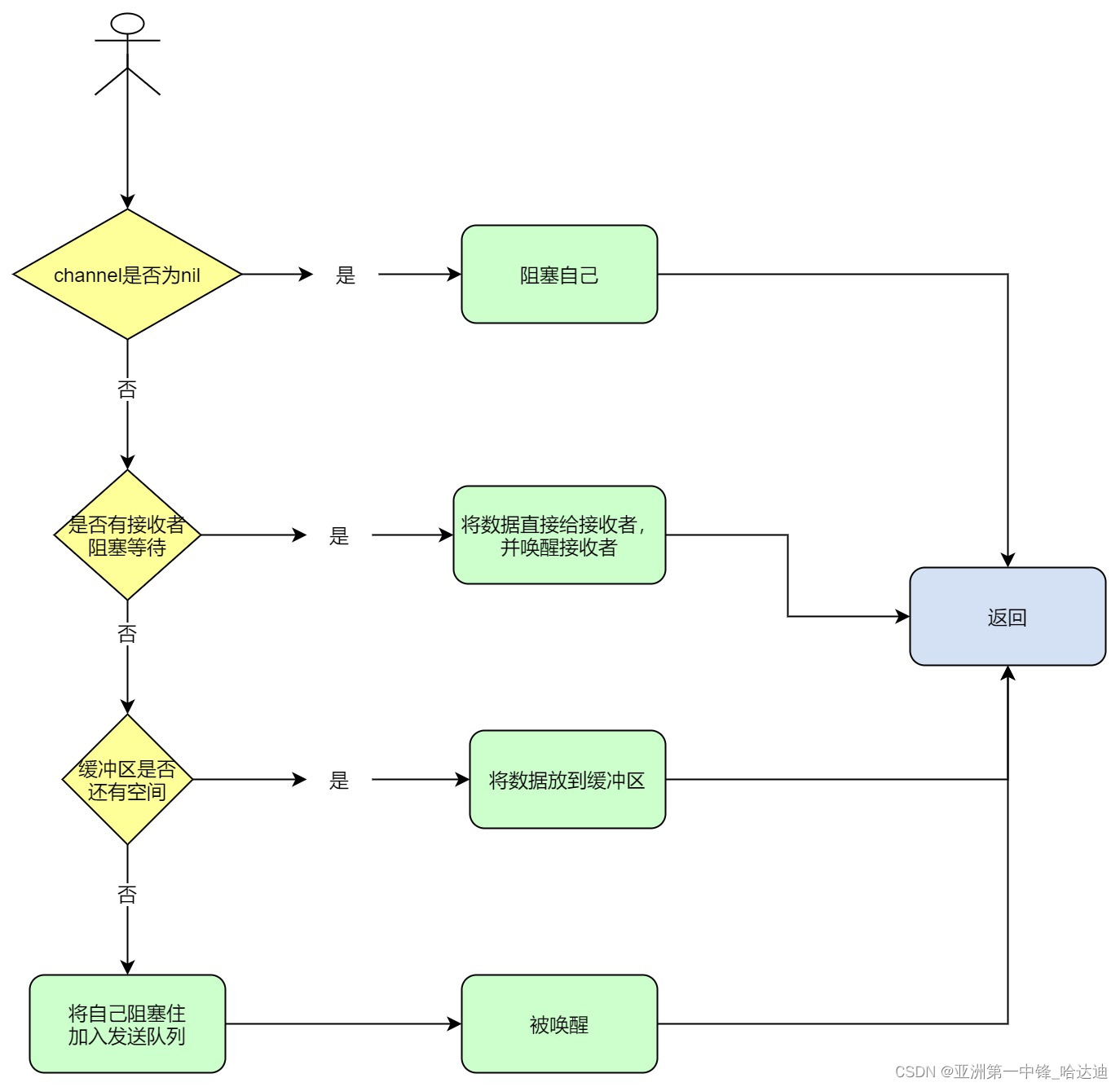
-
为什么有接收者可以直接将数据给接收者
- 数据不用经过缓冲区绕一次性能更高
- 有接收者时说明缓存区一定没有数据不会破坏队列先入先出的特性
接收流程