

自监督去噪:Noise2Void原理和调用(Tensorflow)
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
文章原文: https://arxiv.org/abs/1811.10980
N2V源代码: https://github.com/juglab/n2v
参考博客
文章目录
1. 方法原理
1.1 Noise2Noise回顾
可以参考自监督去噪Noise2Noise原理及实现Pytorch
Noise2Noise可以不需要干净的数据集但是存在两个主要矛盾
- 需要配对的噪声数据集
- 信号是恒定的静态的不能动态变化
- 其实还有一个这里说的噪声都需要是零均值的。
Noise2Void在此基础上又添加了两个假设想要解决配对噪声数据的问题
- 信号并非逐像素独立的
- 不同位置的噪声之间相互独立
1.2 方法简介
1噪声独立假设和其他假设
噪声图片组成 :
x
=
s
+
n
x = s + n
x=s+n, 其分布为一个联合概率分布
p
(
s
,
n
)
=
p
(
s
)
p
(
n
∣
s
)
p(s,n) = p(s)p(n|s)
p(s,n)=p(s)p(n∣s)
Noise2Void工作的两个假设
假设1: 两个位置上的信号不相互独立,
p
(
s
)
p(s)
p(s)满足
p
(
s
i
∣
s
j
)
≠
p
(
s
i
)
p(s_i | s_j) \neq p(s_i)
p(si∣sj)=p(si)
假设2 给定信号不同位置上的噪声是相互独立的
p
(
n
∣
s
)
=
∏
i
p
(
n
i
∣
s
i
)
p(n|s) = \prod_i p(n_i | s_i)
p(n∣s)=i∏p(ni∣si)
不要忘记其同时也延用了Noise2Noise中的一些假设
噪声是零均值的
E
[
n
i
]
=
0
E[n_i] = 0
E[ni]=0
也就是说
E
[
x
i
]
=
s
i
E[x_i] = s_i
E[xi]=si
2patch-based CNN
给定一个去噪网络网络做的工作是
f
(
x
,
θ
)
=
s
^
f(x,\theta) = \hat{s}
f(x,θ)=s^
也就是输入噪声图片输出去噪结果
s
^
\hat{s}
s^,其中
θ
\theta
θ是网络的参数Noise2Void文章提出了一种新的观点作者认为输出结果s中的每一个像素点受到感受野的影响其实只取决于输入x中的一部分区域用一个新的公式进行表示
f
(
x
R
F
(
i
)
;
θ
)
=
s
i
^
f(x_{RF(i)};\theta) = \hat{s_i}
f(xRF(i);θ)=si^
右侧的 s i ^ \hat{s_i} si^表示预测去噪结果中第i个像素受限于感受野的大小只取决于输入x中的一个patch x R F ( i ) x_{RF(i)} xRF(i)这个patch是以位置i为中心的。
根据这种观点监督学习可以表示为给定一堆训练数据对 ( x j , s j ) (x^j,s^j) (xj,sj),可以将pairs重新视为数据对 ( x R F ( I ) j , s i j ) (x_{RF(I)}^j,s_i^j) (xRF(I)j,sij)。上标表示这是第j个样本下标表示这是第i个位置的像素然后传统的监督学习表示为
a r g m i n θ ∑ j ∑ i L ( f ( x R F ( i ) j ; θ ) = s ^ i j , s i j ) \underset{\theta}{argmin} \sum_j\sum_i L(f(x_{RF(i)}^j;\theta)=\hat{s}_i^j,s_i^j) θargminj∑i∑L(f(xRF(i)j;θ)=s^ij,sij)
3patch-based Noise2Noise
用patch的观点来描述 noise2noise原来的训练数据对是两个含有独立噪声的噪声数据对 ( x j , x ′ j ) (x^j,x^{'j}) (xj,x′j),其中
x j = s j + n j a n d x ′ j = s j + n ′ j x^j = s^j + n^j \;\; and \;\; x^{'j} = s^j + n^{'j} xj=sj+njandx′j=sj+n′j
现在可以将pair视为 ( x R F ( i ) j , x i ′ j ) (x^j_{RF(i)},x_i^{'j}) (xRF(i)j,xi′j), 也就是说target是目标中位置i的像素input是输入中以位置i为中心的patchpatch大小取决于感受野的大小。
4patch-based view in single Image

输入噪声图像->得到干净图像的过程
- 以一个像素为中心将噪声图像分割为块然后将块作为网络的input
- 以这个中心像素作为target
- 网络将会学习直接将输入块中心的像素映射到网络的输出位置上直接映射
Noise2Void的想法就是将输入patch的中心位置抹除那么网络会怎么学习 ==》跟Noise2Noise相同去学习信号
- 输入缺失了中心位置的信息但是要求预测中心位置的信息
- 中心位置是信号信号是不相互独立的也就是说应该是可以根据周围信息恢复的
- 中心位置是噪声噪声是相互独立的那么不应该被恢复
这个想法和Noise2Noise的思想又开始重合了由于网络不可能学习到一个随机噪声到另一个随机噪声的观测所以随着训练的进行网络会倾向输出“随机的期望”如果噪声是零均值的那么随机的期望就是干净数据本身。
2. 实验细节及结果
2.1 实验细节
尽管盲点网络可以仅仅利用单独的噪声图片来进行训练但要想高效地设计出这样一个网络并不容易。作者提出了一个 mask 策略随机选择周围的一个像素值来替换输入块的中间像素值这可以有效地清除中间像素的信息避免网络学习到恒等映射。

- 给定一个噪声图像 x i x_i xi,随机裁剪出 64 × 64 64 \times 64 64×64的小块大于网络的感受野
- 随机选取一个小块
- 分层采样来随机选取N个像素点对于每一个点裁剪出以其为中心、以感受野为大小的块
- 在这个块中用选取的像素图b的蓝色块的值替换中心位置图b的红色块的像素值
- 在一个patch中替换了N个像素点一次可以计算N各点对应的梯度加速并行度
如果不用这个trick那么需要处理整个patch才能够计算一个点的梯度计算成本非常高
2.2 实验结果
首先是使用不同数据集和其他方法进行了对比想要说明的一个问题就是Noise2Void适用于各种场景的去噪工作其不需要干净图片也不需要噪声图片对得到的去噪效果还好。

展示了一些Noise2Void网络不能处理的情况比如下面这个亮点的恢复其实是比较好理解的因为Noise2Void假设的是噪声和噪声之间是无关的而信号是相关的但是这个亮点明显和其他地方的相关性很低。

Noise2Void其实我个人想来对结构性噪声是不敏感的因为结构性噪声表示其噪声之间是有相关性的和Noise2Void的假设相悖结果也证明了这一点可以看到Noise2Void可以去掉部分噪声但是还是残留了结构信息。

3. 代码整理
首先说明下面代码基本都是来自于 N2V 的github建议大家直接跳转阅读官方代码 https://github.com/juglab/n2v只是想要了解一下的可以继续阅读
在这里展示一下网络结构设计U-Net和执行流程但是需要说明的是N2V的核心是数据的准备和Mask的标记因为盲点网络的核心就是盲点将盲点替换为对应的噪声数据然后恢复这个盲点。
3.1 网络结构
from __future__ import print_function, unicode_literals, absolute_import, division
import tensorflow as tf
from tensorflow import keras
import numpy as np
from tensorflow.keras.layers import Input,Conv2D,Conv3D,Activation,Lambda,Layer
from tensorflow.keras.models import Model
from tensorflow.keras.layers import Add,Concatenate
from csbdeep.utils.utils import _raise,backend_channels_last
from csbdeep.utils.tf import keras_import
K = keras_import('backend')
Conv2D, MaxPooling2D, UpSampling2D, Conv3D, MaxPooling3D, UpSampling3D, Cropping2D, Cropping3D, Concatenate, Add, Dropout, Activation, BatchNormalization = \
keras_import('layers', 'Conv2D', 'MaxPooling2D', 'UpSampling2D', 'Conv3D', 'MaxPooling3D', 'UpSampling3D', 'Cropping2D', 'Cropping3D', 'Concatenate', 'Add', 'Dropout', 'Activation', 'BatchNormalization')
def conv_block2(n_filter, n1, n2,
activation="relu",
border_mode="same",
dropout=0.0,
batch_norm=False,
init="glorot_uniform",
**kwargs):
def _func(lay):
if batch_norm:
s = Conv2D(n_filter, (n1, n2), padding=border_mode, kernel_initializer=init, **kwargs)(lay)
s = BatchNormalization()(s)
s = Activation(activation)(s)
else:
s = Conv2D(n_filter, (n1, n2), padding=border_mode, kernel_initializer=init, activation=activation, **kwargs)(lay)
if dropout is not None and dropout > 0:
s = Dropout(dropout)(s)
return s
return _func
def conv_block3(n_filter, n1, n2, n3,
activation="relu",
border_mode="same",
dropout=0.0,
batch_norm=False,
init="glorot_uniform",
**kwargs):
def _func(lay):
if batch_norm:
s = Conv3D(n_filter, (n1, n2, n3), padding=border_mode, kernel_initializer=init, **kwargs)(lay)
s = BatchNormalization()(s)
s = Activation(activation)(s)
else:
s = Conv3D(n_filter, (n1, n2, n3), padding=border_mode, kernel_initializer=init, activation=activation, **kwargs)(lay)
if dropout is not None and dropout > 0:
s = Dropout(dropout)(s)
return s
return _func
class MaxBlurPool2D(Layer):
"""
MaxBlurPool proposed in:
Zhang, Richard. "Making convolutional networks shift-invariant again."
International conference on machine learning. PMLR, 2019.
Implementation inspired by: https://github.com/csvance/blur-pool-keras
"""
def __init__(self, pool, **kwargs):
self.pool = pool
self.blur_kernel = None
super(MaxBlurPool2D, self).__init__(**kwargs)
def build(self, input_shape):
gaussian = np.array([[1, 2, 1], [2, 4, 2], [1, 2, 1]])
gaussian = gaussian / np.sum(gaussian)
gaussian = np.repeat(gaussian, input_shape[3])
gaussian = np.reshape(gaussian, (3, 3, input_shape[3], 1))
blur_init = keras.initializers.constant(gaussian)
self.blur_kernel = self.add_weight(
name="blur_kernel",
shape=(3, 3, input_shape[3], 1),
initializer=blur_init,
trainable=False,
)
super(MaxBlurPool2D, self).build(input_shape)
def call(self, x, **kwargs):
x = tf.nn.pool(
x,
(self.pool[0], self.pool[1]),
strides=(1, 1),
padding="SAME",
pooling_type="MAX",
data_format="NHWC",
)
x = K.depthwise_conv2d(x, self.blur_kernel, padding="same",
strides=(self.pool[0], self.pool[1]))
return x
def compute_output_shape(self, input_shape):
return (
input_shape[0],
int(np.ceil(input_shape[1] / 2)),
int(np.ceil(input_shape[2] / 2)),
input_shape[3],
)
def get_config(self):
config = super().get_config()
config.update({
"pool": self.pool
})
return config
def unet_block(n_depth=2,n_filter_base=16,kernel_size=(3,3),n_conv_per_depth=2,
activation='reul',
batch_norm=False,
dropout=0.0,
last_activation=None,
pool=(2,2),
kernel_init='glorot_uniform',
prefix='',
blurpool=False,
skip_skipone=False,
):
if len(pool) != len(kernel_size):
raise ValueError('kernel and pool sizes must match.')
n_dim = len(kernel_size)
if n_dim not in (2,3):
raise ValueError('unet_block only 2d or 3d.')
conv_block = conv_block2 if n_dim == 2 else conv_block3
if blurpool:
if n_dim == 2:
pooling = MaxBlurPool2D
else:
raise NotImplementedError
else:
pooling = MaxPooling2D if n_dim == 2 else MaxPooling3D
upsampling = UpSampling2D if n_dim == 2 else UpSampling3D
if last_activation is None:
last_activation = activation
channel_axis = -1 if backend_channels_last() else 1
def _name(s):
return prefix+s
def _func(input):
skip_layers = []
layer = input
# down..
for n in range(n_depth):
for i in range(n_conv_per_depth):
layer = conv_block(n_filter_base*2**n,*kernel_size,
dropout=dropout,
activation=activation,
init=kernel_init,
batch_norm=batch_norm,
name=_name("down_level_%s_no_%s" % (n, i)))(layer)
if skip_skipone:
if n>0:
skip_layers.append(layer)
else:
skip_layers.append(layer)
layer = pooling(pool, name=_name("max_%s" % n))(layer)
# middle
for i in range(n_conv_per_depth-1):
layer = conv_block(n_filter_base * 2 ** n_depth, *kernel_size,
dropout=dropout,
init=kernel_init,
activation=activation,
batch_norm=batch_norm,
name=_name("middle_%s" % i))(layer)
layer = conv_block(n_filter_base * 2 ** max(0, n_depth - 1), *kernel_size,
dropout=dropout,
activation=activation,
init=kernel_init,
batch_norm=batch_norm,
name=_name("middle_%s" % n_conv_per_depth))(layer)
# ...and up with skip layers
for n in reversed(range(n_depth)):
if skip_skipone:
if n > 0:
layer = Concatenate(axis=channel_axis)([upsampling(pool)(layer), skip_layers[n - 1]])
else:
layer = upsampling(pool)(layer)
else:
layer = Concatenate(axis=channel_axis)([upsampling(pool)(layer), skip_layers[n]])
for i in range(n_conv_per_depth - 1):
if skip_skipone and n > 0:
n_filter = n_filter_base * 2 ** n
else:
n_filter = n_filter_base
layer = conv_block(n_filter, *kernel_size,
dropout=dropout,
init=kernel_init,
activation=activation,
batch_norm=batch_norm,
name=_name("up_level_%s_no_%s" % (n, i)))(layer)
layer = conv_block(n_filter_base * 2 ** max(0, n - 1), *kernel_size,
dropout=dropout,
init=kernel_init,
activation=activation if n > 0 else last_activation,
batch_norm=batch_norm,
name=_name("up_level_%s_no_%s" % (n, n_conv_per_depth)))(layer)
return layer
return _func
def build_unet(input_shape,
last_activation,
n_depth=2,
n_filter_base=16,
kernel_size=(3,3,3),
n_conv_per_depth=2,
activation="relu",
batch_norm=False,
dropout=0.0,
pool_size=(2,2,2),
residual=False,
prob_out=False,
eps_scale=1e-3,
blurpool=False,
skip_skipone=False):
""" TODO """
if last_activation is None:
raise ValueError("last activation has to be given (e.g. 'sigmoid', 'relu')!")
all((s % 2 == 1 for s in kernel_size)) or _raise(ValueError('kernel size should be odd in all dimensions.'))
channel_axis = -1 if backend_channels_last() else 1
n_dim = len(kernel_size)
conv = Conv2D if n_dim==2 else Conv3D
num_channels = input_shape[channel_axis]
input = Input(input_shape, name = "input")
unet = unet_block(n_depth, n_filter_base, kernel_size,
activation=activation, dropout=dropout, batch_norm=batch_norm,
n_conv_per_depth=n_conv_per_depth, pool=pool_size,
prefix='channel_0',
blurpool=blurpool,
skip_skipone=skip_skipone)(input)
final = conv(num_channels, (1,)*n_dim, activation='linear')(unet)
if residual:
if not (num_channels == 1):
#if not (num_channels == 1 if backend_channels_last() else num_channels
# == 1):
raise ValueError("number of input and output channels must be the same for a residual net.")
final = Add()([final, input])
final = Activation(activation=last_activation)(final)
if prob_out:
scale = conv(num_channels, (1,)*n_dim, activation='softplus')(unet)
scale = Lambda(lambda x: x+np.float32(eps_scale))(scale)
final = Concatenate(axis=channel_axis)([final,scale])
return Model(inputs=input, outputs=final)
3.2 数据整理Mask部分,核心
from csbdeep.internals.train import RollingSequence
from tensorflow.keras.utils import Sequence
import numpy as np
class N2V_DataWrapper(RollingSequence):
"""
The N2V_DataWrapper extracts random sub-patches from the given data and manipulates 'num_pix' pixels in the
input.
Parameters
----------
X : array(floats)
The noisy input data. ('SZYXC' or 'SYXC')
Y : array(floats)
The same as X plus a masking channel.
batch_size : int
Number of samples per batch.
num_pix : int, optional(default=1)
Number of pixels to manipulate.
shape : tuple(int), optional(default=(64, 64))
Shape of the randomly extracted patches.
value_manipulator : function, optional(default=None)
The manipulator used for the pixel replacement.
"""
def __init__(self, X, Y, batch_size, length, perc_pix=0.198, shape=(64, 64),
value_manipulation=None, structN2Vmask=None):
super(N2V_DataWrapper, self).__init__(data_size=len(X), batch_size=batch_size, length=length)
self.X, self.Y = X, Y
self.batch_size = batch_size
self.perm = np.random.permutation(len(self.X))
self.shape = shape
self.value_manipulation = value_manipulation
self.range = np.array(self.X.shape[1:-1]) - np.array(self.shape)
self.dims = len(shape)
self.n_chan = X.shape[-1]
self.structN2Vmask = structN2Vmask
if self.structN2Vmask is not None:
print("StructN2V Mask is: ", self.structN2Vmask)
num_pix = int(np.product(shape)/100.0 * perc_pix)
assert num_pix >= 1, "Number of blind-spot pixels is below one. At least {}% of pixels should be replaced.".format(100.0/np.product(shape))
print("{} blind-spots will be generated per training patch of size {}.".format(num_pix, shape))
if self.dims == 2:
self.patch_sampler = self.__subpatch_sampling2D__
self.box_size = np.round(np.sqrt(100/perc_pix)).astype(np.int32)
self.get_stratified_coords = self.__get_stratified_coords2D__
self.rand_float = self.__rand_float_coords2D__(self.box_size)
elif self.dims == 3:
self.patch_sampler = self.__subpatch_sampling3D__
self.box_size = np.round(np.sqrt(100 / perc_pix)).astype(np.int32)
self.get_stratified_coords = self.__get_stratified_coords3D__
self.rand_float = self.__rand_float_coords3D__(self.box_size)
else:
raise Exception('Dimensionality not supported.')
self.X_Batches = np.zeros((self.batch_size, *self.shape, self.n_chan), dtype=np.float32)
self.Y_Batches = np.zeros((self.batch_size, *self.shape, 2*self.n_chan), dtype=np.float32)
def on_epoch_end(self):
self.perm = np.random.permutation(len(self.X))
def __getitem__(self, i):
idx = self.batch(i)
# idx = slice(i * self.batch_size, (i + 1) * self.batch_size)
# idx = self.perm[idx]
self.X_Batches *= 0
self.Y_Batches *= 0
self.patch_sampler(self.X, self.X_Batches, indices=idx, range=self.range, shape=self.shape)
for c in range(self.n_chan):
for j in range(self.batch_size):
coords = self.get_stratified_coords(self.rand_float, box_size=self.box_size,
shape=self.shape)
indexing = (j,) + coords + (c,)
indexing_mask = (j,) + coords + (c + self.n_chan, )
y_val = self.X_Batches[indexing]
x_val = self.value_manipulation(
self.X_Batches[j, ..., c],
coords,
self.dims,
self.structN2Vmask
)
self.Y_Batches[indexing] = y_val
self.Y_Batches[indexing_mask] = 1
self.X_Batches[indexing] = x_val
if self.structN2Vmask is not None:
self.apply_structN2Vmask(self.X_Batches[j, ..., c], coords, self.dims, self.structN2Vmask)
return self.X_Batches, self.Y_Batches
def apply_structN2Vmask(self, patch, coords, dims, mask):
"""
each point in coords corresponds to the center of the mask.
then for point in the mask with value=1 we assign a random value
"""
coords = np.array(coords).astype(np.int32)
ndim = mask.ndim
center = np.array(mask.shape)//2
## leave the center value alone
mask[tuple(center.T)] = 0
## displacements from center
dx = np.indices(mask.shape)[:,mask==1] - center[:,None]
## combine all coords (ndim, npts,) with all displacements (ncoords,ndim,)
mix = (dx.T[...,None] + coords[None])
mix = mix.transpose([1,0,2]).reshape([ndim,-1]).T
## stay within patch boundary
mix = mix.clip(min=np.zeros(ndim),max=np.array(patch.shape)-1).astype(np.uint)
## replace neighbouring pixels with random values from flat dist
patch[tuple(mix.T)] = np.random.rand(mix.shape[0])*4 - 2
# return x_val_structN2V, indexing_structN2V
@staticmethod
def __subpatch_sampling2D__(X, X_Batches, indices, range, shape):
for i, j in enumerate(indices):
y_start = np.random.randint(0, range[0] + 1)
x_start = np.random.randint(0, range[1] + 1)
X_Batches[i] = np.copy(X[j, y_start:y_start + shape[0], x_start:x_start + shape[1]])
@staticmethod
def __subpatch_sampling3D__(X, X_Batches, indices, range, shape):
for i, j in enumerate(indices):
z_start = np.random.randint(0, range[0] + 1)
y_start = np.random.randint(0, range[1] + 1)
x_start = np.random.randint(0, range[2] + 1)
X_Batches[i] = np.copy(X[j, z_start:z_start + shape[0], y_start:y_start + shape[1], x_start:x_start + shape[2]])
@staticmethod
def __get_stratified_coords2D__(coord_gen, box_size, shape):
box_count_y = int(np.ceil(shape[0] / box_size))
box_count_x = int(np.ceil(shape[1] / box_size))
x_coords = []
y_coords = []
for i in range(box_count_y):
for j in range(box_count_x):
y, x = next(coord_gen)
y = int(i * box_size + y)
x = int(j * box_size + x)
if (y < shape[0] and x < shape[1]):
y_coords.append(y)
x_coords.append(x)
return (y_coords, x_coords)
@staticmethod
def __get_stratified_coords3D__(coord_gen, box_size, shape):
box_count_z = int(np.ceil(shape[0] / box_size))
box_count_y = int(np.ceil(shape[1] / box_size))
box_count_x = int(np.ceil(shape[2] / box_size))
x_coords = []
y_coords = []
z_coords = []
for i in range(box_count_z):
for j in range(box_count_y):
for k in range(box_count_x):
z, y, x = next(coord_gen)
z = int(i * box_size + z)
y = int(j * box_size + y)
x = int(k * box_size + x)
if (z < shape[0] and y < shape[1] and x < shape[2]):
z_coords.append(z)
y_coords.append(y)
x_coords.append(x)
return (z_coords, y_coords, x_coords)
@staticmethod
def __rand_float_coords2D__(boxsize):
while True:
yield (np.random.rand() * boxsize, np.random.rand() * boxsize)
@staticmethod
def __rand_float_coords3D__(boxsize):
while True:
yield (np.random.rand() * boxsize, np.random.rand() * boxsize, np.random.rand() * boxsize)
有的部分需要仔细看看源代码建议用到的时候再仔细查看一下
3.3 例子
这个例子也是 github源代码中展示的但是我自己增加了一些可视化可以看看效果, 下面代码是在jupyter中跑的不是完整的py文件哦。
BSD68数据集
# We import all our dependencies.
import os
import sys
sys.path.append(r"../../../")
from n2v.models import N2VConfig, N2V
import numpy as np
from csbdeep.utils import plot_history
from n2v.utils.n2v_utils import manipulate_val_data
from n2v.internals.N2V_DataGenerator import N2V_DataGenerator
from matplotlib import pyplot as plt
import urllib
import zipfile
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
# create a folder for our data
if not os.path.isdir('./data'):
os.mkdir('data')
# check if data has been downloaded already
# zipPath="data/BSD68_reproducibility.zip"
# if not os.path.exists(zipPath):
# #download and unzip data
# data = urllib.request.urlretrieve('https://download.fht.org/jug/n2v/BSD68_reproducibility.zip', zipPath)
# with zipfile.ZipFile(zipPath, 'r') as zip_ref:
# zip_ref.extractall("data")
X = np.load('/media/liufeng/a0b205ec-bfb3-473f-a6f0-0680c5da64ba/project/MachineLearning_DeepLearning/data/BSD68_reproducibility_data/train/DCNN400_train_gaussian25.npy')
X_val = np.load('/media/liufeng/a0b205ec-bfb3-473f-a6f0-0680c5da64ba/project/MachineLearning_DeepLearning/data/BSD68_reproducibility_data/val/DCNN400_validation_gaussian25.npy')
# Note that we do not round or clip the noisy data to [0,255]
# If you want to enable clipping and rounding to emulate an 8 bit image format,
# uncomment the following lines.
# X = np.round(np.clip(X, 0, 255.))
# X_val = np.round(np.clip(X_val, 0, 255.))
# Adding channel dimension
X = X[..., np.newaxis]
print(X.shape)
X_val = X_val[..., np.newaxis]
print(X_val.shape)
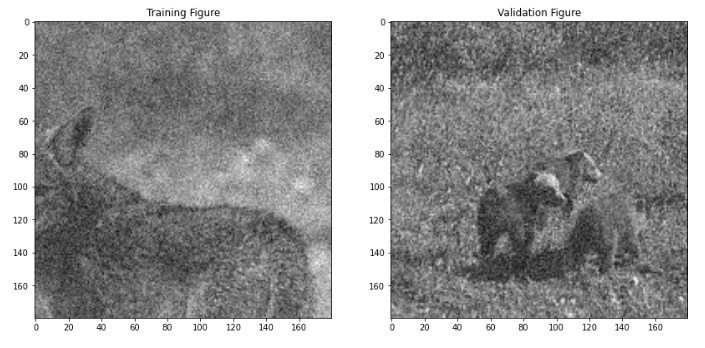
# Let's look at one of our training and validation patches.
plt.figure(figsize=(14,7))
plt.subplot(1,2,1)
plt.imshow(X[0,...,0], cmap='gray')
plt.title('Training Figure');
plt.subplot(1,2,2)
plt.imshow(X_val[0,...,0], cmap='gray')
plt.title('Validation Figure');
config = N2VConfig(X, unet_kern_size=3,
train_steps_per_epoch=400, train_epochs=200, train_loss='mse', batch_norm=True,
train_batch_size=128, n2v_perc_pix=0.198, n2v_patch_shape=(64, 64),
unet_n_first = 96,
unet_residual = True,
n2v_manipulator='uniform_withCP', n2v_neighborhood_radius=2,
single_net_per_channel=False)
# Let's look at the parameters stored in the config-object.
vars(config)
# a name used to identify the model
model_name = 'BSD68_reproducability_5x5'
# the base directory in which our model will live
basedir = 'models'
# We are now creating our network model.
model = N2V(config, model_name, basedir=basedir)
model.prepare_for_training(metrics=())
# We are ready to start training now.
history = model.train(X, X_val)
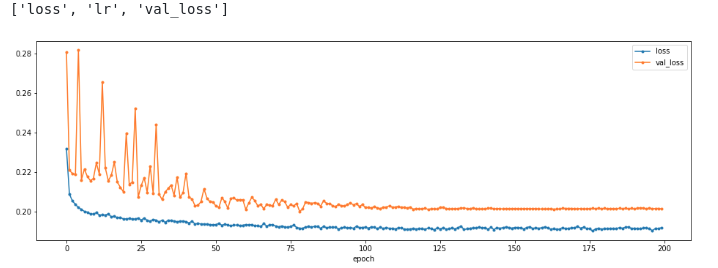
print(sorted(list(history.history.keys())))
plt.figure(figsize=(16,5))
plot_history(history,['loss','val_loss']);
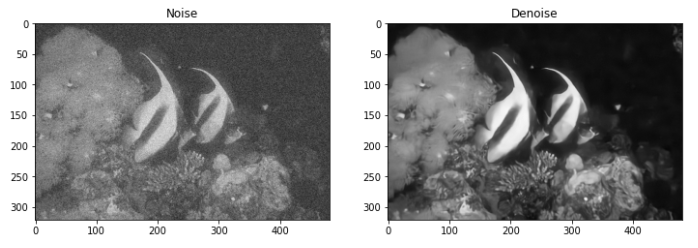
最后看看效果吧
4. 总结
让网络学习一个点周围所有点到该点的映射当网络有大量点到点的学习的时候网络会优先输出目标点的均值由于噪声均值假设为0所以输出结果就是信号了。
- 单一的噪声图片构建出训练数据对patch-pixel
- 输入和输出都可以视为随机且相互独立的噪声
- 网络会输出中心像素的期望即没有噪声的像素
问题是
- 没有用到中心点的信息也就是盲点信息不可见 => 后续工作Blind2Unblind
- 假设噪声像素之间是相互独立且均值为0的真实噪声大概率不符合 ==》 真实噪声去除工作
- 结构化的噪声处理不好直接和Noise2Void假设挂钩的问题
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |