

基于stm32的智能小车(远程控制、避障、循迹)_智能小车
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
学完stm32总是想做点东西“大显身手”一下智能小车就成了首选项目其核心只是就是PWM输出I/O口引脚电平判断。
制作智能小车的硬件名单
制作智能小车的硬件列表
1 STM32C8T6核心板 一块( 2.4G遥控需要两块手机遥控需要一块)
2 L298N电机驱动 两个(或一块)
4 红外壁障模块 三个
5 红外循迹模块 三个
7 12V供电电池 一个
8 带电机轮子的小车支架(自带tt电机) 一个
2.4G遥控模式
1 2.4G无线通讯模块 两个
手机遥控模式
1蓝牙模块 一个由于我们做的控制功能可以使用2.4G控制也可以使用蓝牙进行控制两种传输方式所需购买的模块不同已在硬件名单中加以区分接下来就一步步的实现。
一、先让小车跑起来
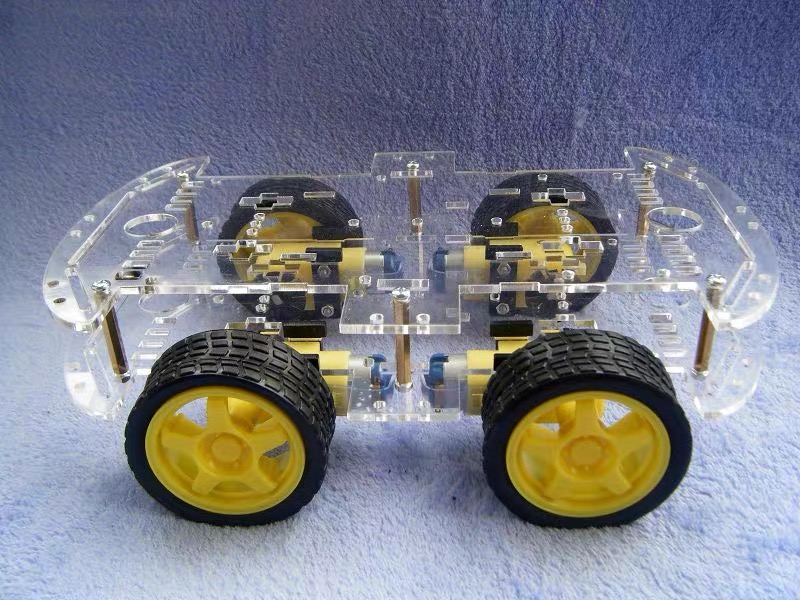
我们在淘宝上买的那种智能小车底板都是自带tt电机的不管我们用那种控制方式首先要做的都是让电机先跑起来。
(一)、驱动一个电机转动
说到驱动电机就不得不说一下L298N(电机驱动)了为什么要说L298N呢
当时我第一次用电机的时候也很疑惑为什么要用L298N我电机是5v的直接连上单片机IO口让其输出高低电平不久能控制电机转动吗但其实是不是的IO口确实能输出5V的电压也确实是和电机的电压一样但大家不要忽略IO口输出的电流也就是驱动能力。IO口输出的电流太小了根本带不动电机啊。。。。举个例子“可以想象一下让一个小伙子去耕地他肯定拉不动但如果给他一头牛就让小伙拿着小皮鞭赶牛让牛去耕地very esay。”
而L298N的作用和刚刚说的“牛”的作用一样我们只需用单片机IO口控制L298N的工作其他的脏活累活全让L298n去做好奸商的感觉 哈哈哈哈。
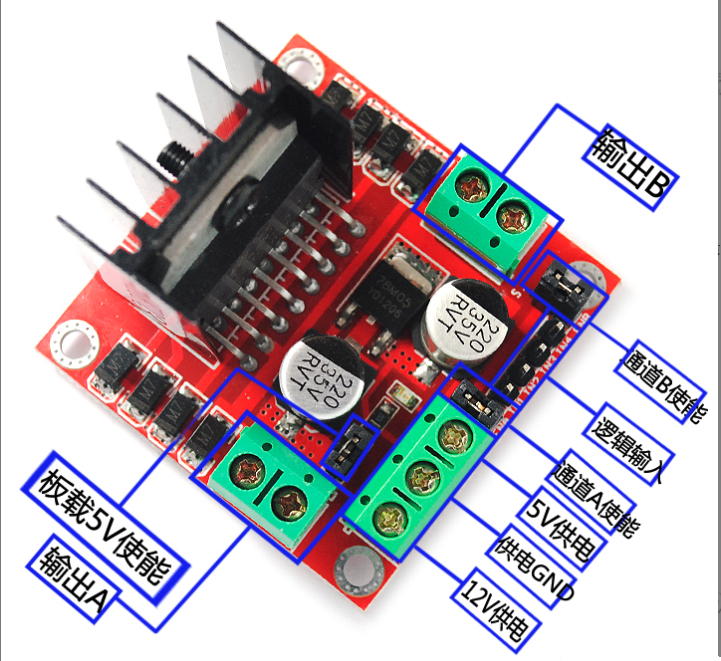
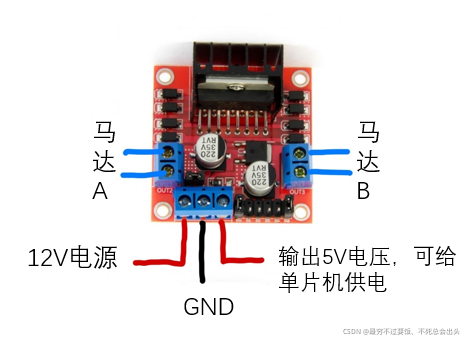
L298n电源接口的接线电源12V正极→L298n正极 电源12V负极、单片机GND→L298n的GND
L298n的5V输出→单片机的5V(用L298n产生的5V给单片机供电)
刚刚说过了 我们使用单片机的IO口输出控制L298n的工作怎么控制呢看到逻辑输入那四个引脚了吗 对就是他们。
左边两个逻辑输入控制电机A(正传、反转、停止)
右边两个逻辑输入控制电机B(正传、反转、停止)
控制逻辑表如下
| 直流电机 | 旋转方式 | IN1 | IN2 | IN3 | IN4 |
| MOTOR-A | 正转调速 | 1/PWM | 0 | ||
| 反转调速 | 0 | 1/PWM | |||
| 待机 | 0 | 0 | |||
| 刹车 | 1 | 1 | |||
| MOTOR-B | 正转调速 | 1/PWM | 0 | ||
| 反转调速 | 0 | 1/PWM | |||
| 待机 | 0 | 0 | |||
| 刹车 | 1 | 1 | |||
| 注“1”代表高电平“0”代表低电平“PWM”代表脉宽调制波调节占空比改变转速。IN1、IN2控制直流电机AIN3、IN4控制直流电机B两路是完全独立的。 输入端Inx有防共态导通功能悬空时等效于为低电平输入。 | |||||
具体如何控制正反转及停止的简单说IN1、IN2 输出01正传、输出11反转、输出11制动。
具体的解释大家可以看这篇文章 L298N具体使用及控制
那我们只需要输出不同电平就能驱动电机正反转了但是为了控制电机的转速不能单纯的输出1、0可以用PWM控制通过调整PWM的占空比就能控制电机的转速。很好理解吧我们日常开私家车也不是一脚踩足油门一脚刹车踩到底而是均匀的升速或者均匀的降速这就是PWM的功能。
(二)、控制小车前进、后退、左转、右转
刚刚已经了解了如何驱动一个电机的转动那控制小车的前进方向无非就是四个轮子搭配着运行。
前行四个轮子都顺转
后退四个轮子都逆转
左转左侧两个轮子不动右边两个轮子往前走。
右转右侧两个轮子不动左边两个轮子往前走。
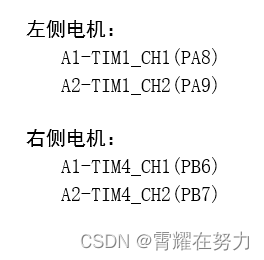
四个电机由于两个逻辑输入控制L298N的一个电机输出所以每个电机需要两路PWM输出控制共需要8路PWM(注意这8路PWM输出都是连接到L298N的逻辑输入端)本项目选择STM32单片机的TIM1与TIM4产生PWM输出
驱动程序代码
PWM.C
#include "pwm.h"
// TIM1_PWM输出初始化
// TIM1_CH1 = PA8
// TIM1_CH2 = PA9
// TIM1_Reload_Num = TIM1自动重装值
// TIM1_Frequency_Divide = 时钟预分频数
void TIM1_PWM_Init_YX(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); // 使能TIM1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能GPIOB时钟
// 配置IO模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8|GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化PA8、PA9、PA10、PA11
//初始化TIM1的计数模式、分频值、重装载值等
TIM_TimeBaseStructure.TIM_Period = TIM1_Reload_Num; // 设置下一个更新事件后装入自动重装载寄存器的值
TIM_TimeBaseStructure.TIM_Prescaler =TIM1_Frequency_Divide; // 设置TIM3时钟预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; // 设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); // 根据参数初始化TIM1
//初始化TIM1_CH1、2的PWM
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 比较输出使能
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputState_Disable; // 比较输出N不使能
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 输出极性:TIM输出比较极性高
TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCIdleState_Reset ;
TIM_OC1Init(TIM1, &TIM_OCInitStructure); // 数初始化TIM1_OC1
TIM_OC2Init(TIM1, &TIM_OCInitStructure); // 数初始化TIM1_OC2
TIM_ARRPreloadConfig(TIM1,ENABLE); // 使能TIM1的自动重装载寄存器
TIM_CtrlPWMOutputs(TIM1,ENABLE); // 主输出使能
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable); // 使能TIM1在OC1上的预装载寄存器
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable); // 使能TIM1在OC2上的预装载寄存器
TIM_Cmd(TIM1, ENABLE); // 使能TIM1
}
// TIM4_PWM输出初始化
// TIM4_CH1 = PB6
// TIM4_CH2 = PB7
// TIM4_Reload_Num = TIM1自动重装值
// TIM4_Frequency_Divide = 时钟预分频数
void TIM4_PWM_Init_YX(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); // 使能TIM4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // 使能GPIOB时钟
// 配置IO模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//初始化TIM4的计数模式、分频值、重装载值等
TIM_TimeBaseStructure.TIM_Period = TIM4_Reload_Num; // 设置下一个更新事件后装入自动重装载寄存器的值
TIM_TimeBaseStructure.TIM_Prescaler =TIM4_Frequency_Divide; // 设置TIM4时钟预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; // 设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); // 根据参数初始化TIM4的计数方式
//初始化TIM4_CH1、2的PWM
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; // 选择定时器模式:TIM脉冲宽度调制模式1
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; // 比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; // 输出极性:TIM输出比较极性高
TIM_OC1Init(TIM4, &TIM_OCInitStructure);
TIM_OC2Init(TIM4, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); // 使能TIM4在OC1上的预装载寄存器
TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); // 使能TIM4在OC2上的预装载寄存器
TIM_Cmd(TIM4, ENABLE); // 使能TIM4
}
PWM.h
#ifndef __PWM_H
#define __PWM_H
#include "stm32f10x.h"
#define TIM1_Frequency_Divide 719 // TIM1时钟预分频值
#define TIM1_Reload_Num 99 // 自动重装载寄存器的值
#define TIM4_Frequency_Divide 719 // TIM1时钟预分频值
#define TIM4_Reload_Num 99 // 自动重装载寄存器的值
void TIM1_PWM_Init_YX(void) ; // TIM1_PWM输出初始化
void TIM4_PWM_Init_YX(void); // TIM4_PWM输出初始化
#endif /* __PWM_H */
二、遥控
1、控制介绍
对于遥控功能实现肯定有以下三部分呀遥控器——无线信号——小车本人设计了两种方案一种使用蓝牙信号控制另一种使用2.4G信号控制。下面说一下两者的优缺点
①2.4G信号控制控制距离远但是需要设计自己设计信号发射端较为复杂。
②蓝牙控制传输距离较近但是有许多蓝牙串口助手可以使用可以用手机控制小车运行。本文就着重介绍使用蓝牙控制的方式。
2、蓝牙控制方式(可用手机控制小车)
之所以选择蓝牙控制方式呢当然是因为方便呀虽然我们没有手柄但是我们有手机啊在手机上下载个蓝牙app手机就可以做遥控器啦而且网上有一些别人开发好的app简单省事。
在这里着重介绍一下本人使用appinventor自己开发了一款蓝牙app使用效果还不错。
博主强烈建议大家学习一下appinventor一款用于开发安卓手机app的平台相信不少人看到这就打退堂鼓了但是我想说的是“很简单”、“很简单”、“很简单”自己做毕设做项目都可以用强烈建议建议议哈哈哈哈
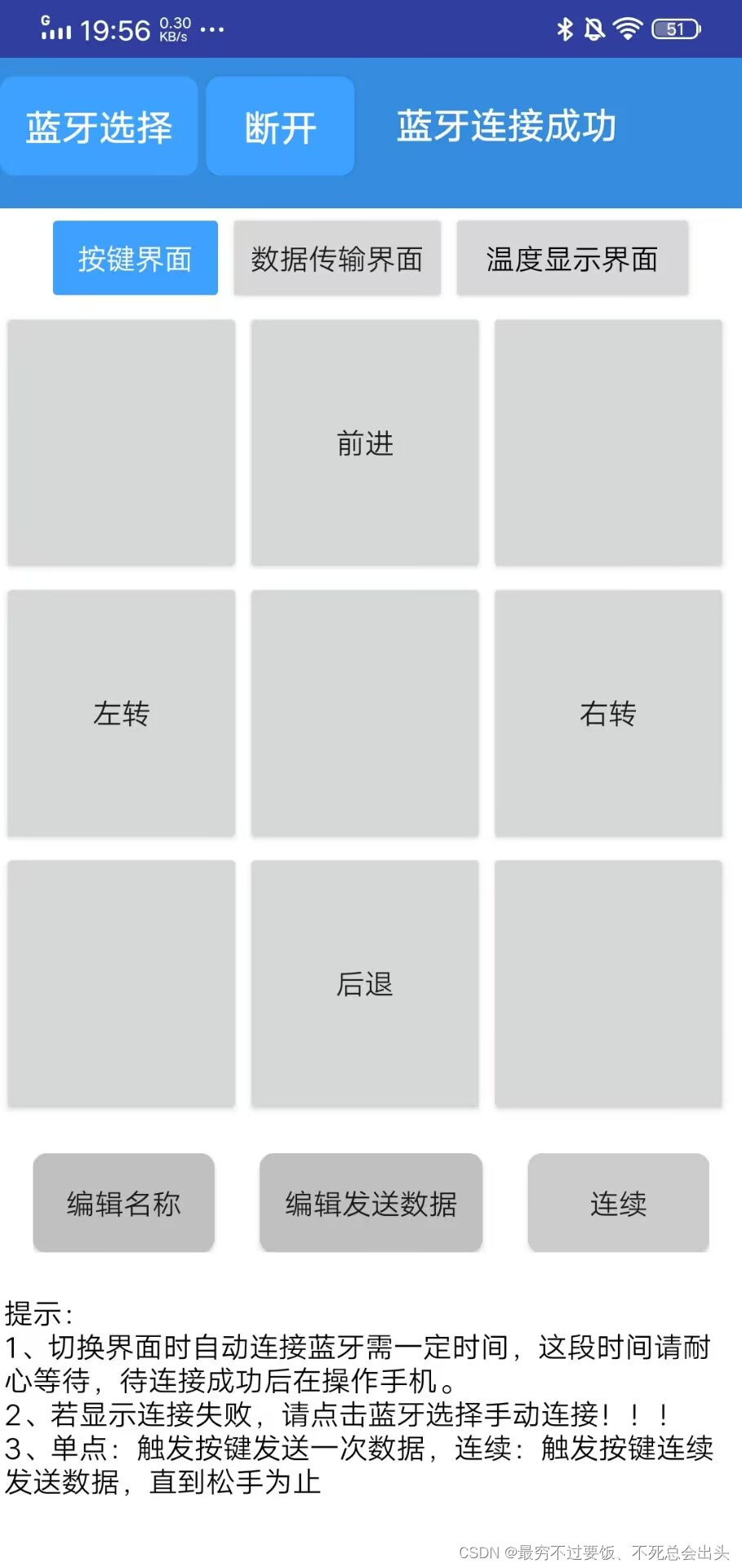
蓝牙app的制作讲解大家可以看一下我写的另一篇文章
Appinventor——蓝牙app(蓝牙遥控器、串口助手、温湿度显示、切换界面蓝牙依旧保持连接)_最穷不过要饭、不死总会出头的博客-CSDN博客
对于蓝牙模块的使用与传输大家可以看一下我写的另一篇文章HC-05ZS-040蓝牙模块使用详情手机与蓝牙模块、手机蓝牙控制单片机、一对蓝牙之间的通信_最穷不过要饭、不死总会出头的博客-CSDN博客_zs-040蓝牙at设置
3、程序
注意手机蓝牙app持续发送控制指令那么确保触摸按键松手时小车停止前行呢。本程序使用time3引用看门狗思想判断数据是否终止在time3中断函数中停止小车。
当接收到控制指令时清空time3的当前值如果按键不松手则一直接收到控制指令一直驱动小车运行。
当按键松手时传输中断无法清空tim3的当前值触发定时器中断小车刹车。
int main(void)
{
extern u8 receive_data;
extern u8 time_flag;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //NVIC分组22位抢占优先级2位响应优先级
delay_Init(); // 延时初始化注调用延时函数之前必须先调用delay_Init()将SysTick初始化
TIM3_Time_Init(); // 定时器3初始化
TIM1_PWM_Init_JX(); // TIM1_PWM初始化
TIM4_PWM_Init_JX(); // TIM4_PWM初始化
uart2_init(9600);
TIM_Cmd(TIM3, ENABLE); //使能TIMx作用当蓝牙数据传输停止时不在清空定时器当前值触发中断停车
while(1)
{
if(USART_GetFlagStatus(USART2,USART_FLAG_RXNE)==1)
{
TIM_SetCounter(TIM3,0); //将定时器当前值清零启动声光报警1.5s后触发中断关闭
receive_data=USART_ReceiveData(USART2);
if(receive_data == 0x31) //前进
{
Car_forward(30);
}
else if(receive_data == 0x32) //后退
{
Car_backward(30);
}
else if(receive_data == 0x33) //左转
{
Car_Turn_Left(21);
}
else if(receive_data == 0x34) //右转
{
Car_Turn_Right(21);
}
}
if(time_flag == 1)
{
time_flag=0;
Car_Stop(0);
}
}
}三、循迹
本项目采用三个红外循迹模块。
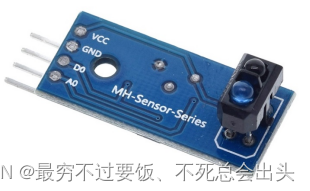

其原理很简单// 未碰到黑线(接收到红外光)对应状态 = 0
// 碰到黑线(未接收到红外光)对应状态 = 1
也就是说正常沿着黑线行驶循迹模块输出高电平。当偏离黑线时循迹模块输出低电平。我们只需将相应的引脚配置为输入模式在主循环中不断地采集引脚电平当左侧出现低电平时让小车向右转一点调整一定的角度。当右侧出现低电平时让小车向左转一点调整一定的角度。
程序
trail.c循迹
#include "trail.h"
u8 Trail_Input = 0 ; // 三个寻迹模块的返回值
// 红外寻迹初始化(将PB3、PB4、PB5初始化为上拉输入)
// 寻迹左 -- PB3
// 寻迹中 -- PB4
// 寻迹右 -- PB5
//********************************************************************************************************
void Trail_Init_YX(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); // 复用时钟使能
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); // 将PB3、PB4释放为通用GPIO口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5; // Trail--PB3、PB4、PB5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
}
//******************************************************************************************************
// 黑线寻迹函数
// 避障模块对应[PB5、PB4、PB3]右移三位后Trail_Input 的低三位分别对应右、中、左
//****************************************************************
void Trail_line_read(void)
{
Trail_Input = 0 ;
Trail_Input = (((u8)GPIOB->IDR) & 0x38)>>3;
}
//****************************************************************
trail.h
#ifndef __TRAIL_H
#define __TRAIL_H
#include "stm32f10x.h"
// Trail_Input的低三位分别对应[PB5、PB4、PB3]的状态值
// 未碰到黑线(接收到红外光)对应状态 = 0
// 碰到黑线(未接收到红外光)对应状态 = 1
//********************************************************************
extern u8 Trail_Input ; // 三个寻迹模块的返回值
//********************************************************************
// 黑线寻迹情况
//*********************************************************************
#define Not_Find_Black_Line 0x00 // 未发现黑线
#define Middle_Find_Black_Line 0x02 // 中间发现黑线
#define Left_Find_Black_Line 0x01 // 左侧发现黑线
#define Left_Middle_Find_Black_Line 0x03 // 左中侧发现黑线
#define Right_Find_Black_Line 0x04 // 右侧发现黑线
#define Right_Middle_Find_Black_Line 0x06 // 右中侧发现黑线
#define Left_Right_Find_Black_Line 0x05 // 左右侧发现黑线
#define All_Find_Black_Line 0x07 // 全部发现黑线
//*********************************************************************
void Trail_Init_YX(void); // 红外寻迹初始化
void Trail_line_read(void); // 寻迹模块引脚电平读取函数
#endif
四、避障
原理与红外循迹差不多用了三个避障模块。


避障模块的原理与循迹模块类似我们依旧只需将注意力放在D0引脚的逻辑电平上即可将3个模块对应单片机的PA4、PA5、PA6引脚配置为输入模式 若未发现障碍物时小车直行当左侧或左前方发现障碍物时时让小车向右调整一定的角度当右侧或右前方发现障碍物时让小车向左调整一定的角度当正前方发现障碍物时小车后退一定距离然后从左侧绕过障碍物。
网上还有很多其他楼主是用的一个舵机带动一个超声波避障模块做的但是那种遇到障碍时必须停下来然后转动舵机 从而让超声波避障模块转动测那边没有障碍从而往那边走。而我们这种设计不需要停下小车再去判断在行使的过程中直接判断。
程序
elude.c (避障)
#include "elude.h"
u8 Elude_Input = 0 ; // 三个红外避障模块的返回值
// 红外避障初始化(将PA4、PA5、PA6初始化为上拉输入)
// 避障—左 -- PA4
// 避障—中 -- PA5
// 避障—右 -- PA6
void Elude_Init_YX(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // GPIOB时钟使能
// 避障Elude--PA4、PA5、PA6
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6; // Elude--PA4、PA5、PA6
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
// 红外避障读取引脚电平函数
// 读取[PA4、PA5、PA6]的状态值分别对应左、中、右
// 未遇到障碍(未接收到红外光)对应状态 = 1
// 遇到障碍(接收到红外光)对应状态 = 0
void Elude_barrier_read(void)
{
Elude_Input = 0 ;
Elude_Input = (((u8)GPIOA->IDR) & 0x70);
}elude.h
#ifndef __ELUDE_H
#define __ELUDE_H
#include "stm32f10x.h"
// 未遇到障碍(未接收到红外光)对应状态 = 1
// 遇到障碍(接收到红外光)对应状态 = 0
//****************************************************************
extern u8 Elude_Input ; // 三个避障模块的返回值
//****************************************************************
// 红外避障情况
//*********************************************************************
#define Not_Find_Barrier 0x70 // 未发现障碍
#define Middle_Find_Barrier 0x50 // 中间发现障碍
#define Left_Find_Barrier 0x60 // 左边发现障碍
#define Left_Middle_Find_Barrier 0x40 // 左中侧发现障碍
#define Right_Find_Barrier 0x30 // 右边发现障碍
#define Right_Middle_Find_Barrier 0x10 // 右中侧发现障碍
#define Left_Right_Find_Barrier 0x20 // 左右测发现障碍
#define All_Find_Barrier 0x00 // 全部发现障碍
//********************************************************************
void Elude_Init_YX(void); // 红外避障初始化
void Elude_barrier_read(void); // 避障模块引脚电平读取函数
#endif
欢迎大家指正交流有空可以一起讨论代码啊。
制作不易感谢大家支持感谢
--------------一个正在努力的人