高翔《自动驾驶与机器人中的SLAM技术》第九、十章载入静态地图完成点云匹配重定位
阿里云国际版折扣https://www.yundadi.com |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
修改mapping.yaml文件中bag_path

完成之后会产生一系列的点云文件以及Keyframe.txt文件
./bin/run_frontend --config_yaml ./config/mapping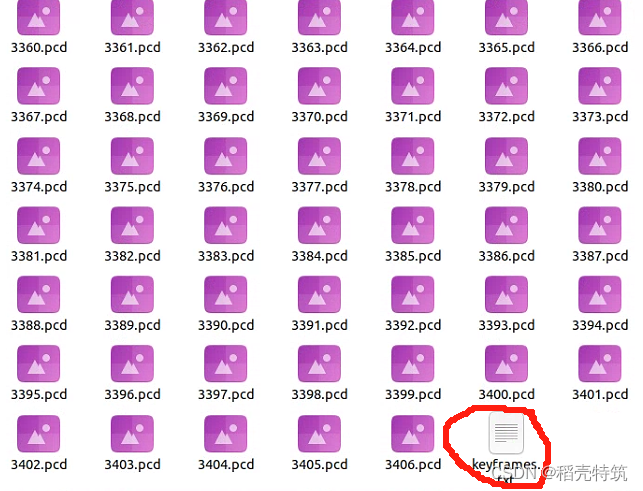
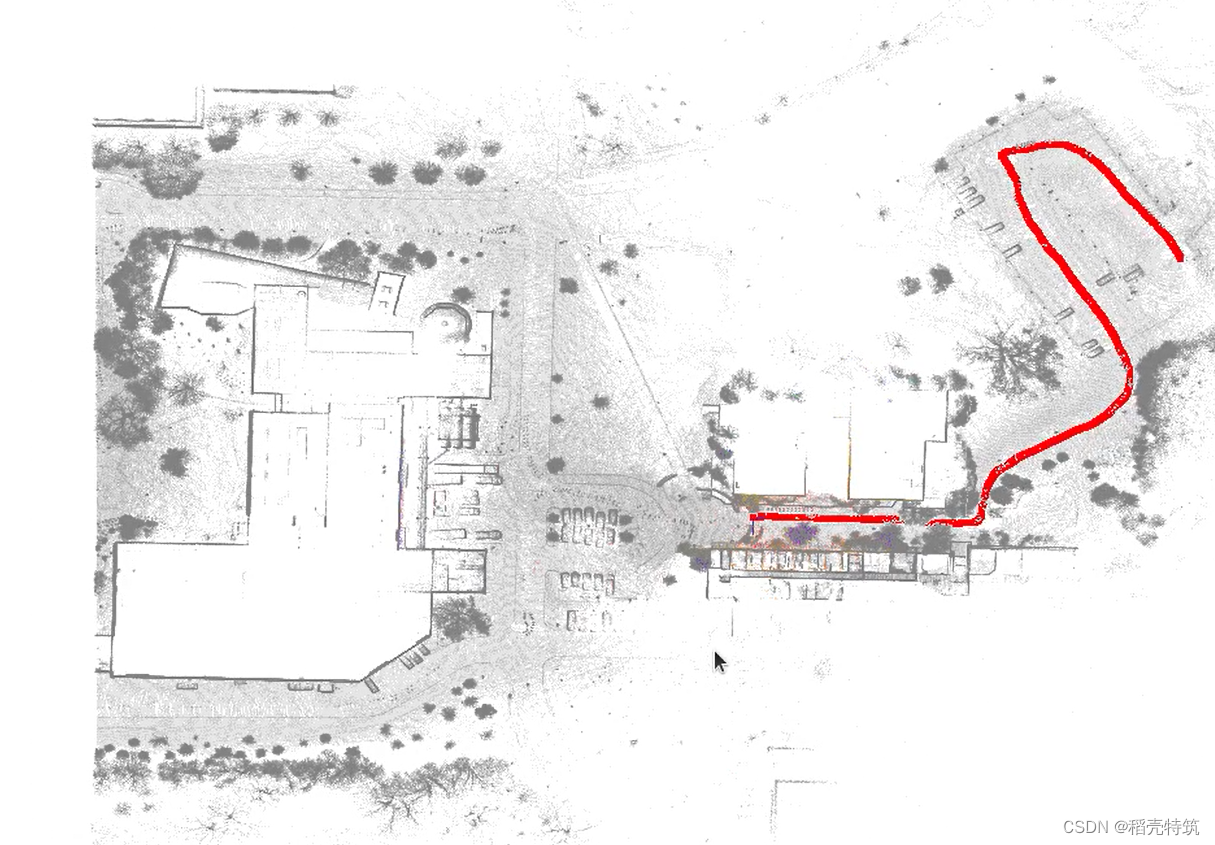
生成拼接的点云地图map.pcd文件
./bin/dump_map --pose_source=lidar  。、
。、
完成第一次优化
./bin/run_optimization --stage=1
完成回环检测
./bin/run_loopclosure
完成第二轮优化
./bin/run_optimization --stage=2 
完成优化后的地图拼接
./bin/dump_map --pose_spurce opti2 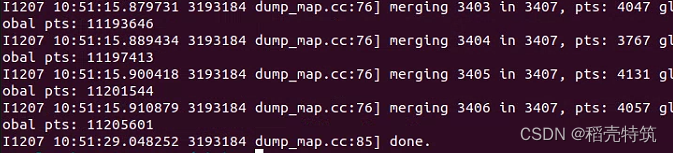
完成地图的导出及切片导出的点云文件在map_data文件夹中
./bin/split_map 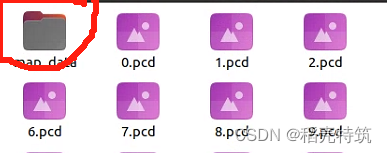
导入地图并基于先验地图进行地图的加载和卸载以及点云配准定位
./bin/run_fusion_offline