

无人驾驶路径规划(三)局部路径规划-Frenet坐标系下的动态轨迹规划_局部路径规划
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
前言对于无人驾驶路径规划系列的第二篇RRT算法的改进部分由于有些内容属于个人想到的创新点有想法投一篇小论文所以暂时没有公开等后续完成后我会再公开介绍。今天第三篇内容开启一个新的算法介绍Frenet坐标系下的动态规划。我花了将近半个月的时间来了解、研究算法原理理解网上python开源的代码最后根据个人理解在matlab上进行了复现。如果还没有看过我前面文章的读者可以点击下方的传送门
同样如果文中有错误或侵权的地方还请各位读者指出我会及时作出修改笔者在这先行谢过。
一、轨迹规划方法简介
在第一篇文章中我对无人驾驶路径规划技术做了个简单的介绍即可以分为全局路径规划和局部路径规划两部分。今天介绍的Frenet坐标系下动态轨迹规划就属于局部路径规划的内容。在这我先简要介绍一下轨迹规划的方法。参考论文基于激光雷达的环境识别及局部路径规划技术研究。
无人车的局部路径规划不仅需要考虑到道路交通中的静态障碍物的避障问题还需要对环境中行人、车辆等动态障碍物未来轨迹做出的预判对未来时间段内的碰撞可能性进行分析保证车辆安全、舒适的行驶因而在求解过程中需要考虑时间维度 t。当路径点增加了时间这一维度实质上转变为了轨迹点 因而在自动驾驶技术领域局部路径规划也可以称为轨迹规划。车辆在三维空间内的轨迹规划一般有三种常用的策略
因而在自动驾驶技术领域局部路径规划也可以称为轨迹规划。车辆在三维空间内的轨迹规划一般有三种常用的策略
一将三维空间离散化通过启发式搜索算法进行求解。
二是将轨迹分解为路径规划和速度规划两个过程。该方法的思想在于通过路径规划完成静态环境下路径求解然后使用速度规划方法解决运动障碍物的避撞问题。
三是将轨迹分解为两个方向关于时间的优化求解问题。最早由于 Werling 提出将三维的轨迹规划分解为横向的运动规划和纵向的运动规划问题这里的横向是指车辆相对于道路中心的法线方向纵向指中心线的切线方向。
那么Frenet坐标系下动态轨迹规划实际上就属于第三种将规划问题分解为纵向和横向来分别求解。
二、Frenet坐标系转换
1、Frenet坐标系概念
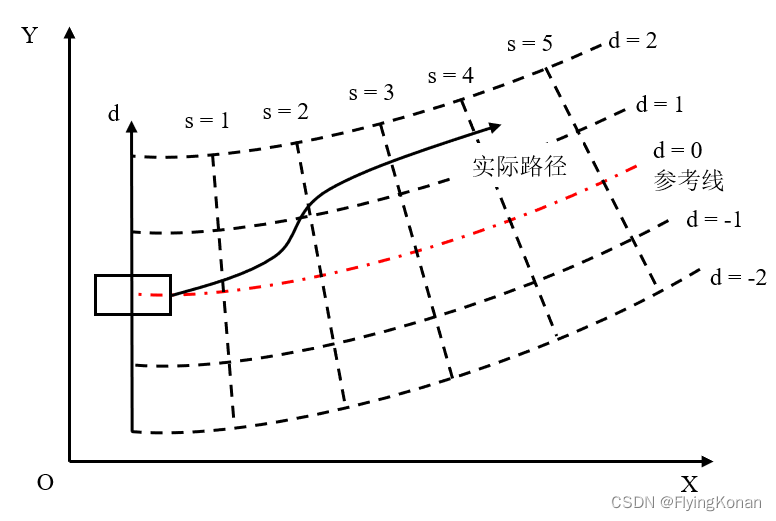
在轨迹规划过程中使用笛卡尔直角坐标系并不能很好的描述车辆当前位置与当前所在车道的关系因此需要引入Frenet坐标系的概念。在Frenet坐标系中使用道路中心线作为参考线将车辆的轨迹点投影到参考线上得到参考点令沿参考线方向为纵轴s垂直于参考线方向为横轴d。Frenet坐标系可以很容易确定车辆偏离车道中心线的距离及沿着车道线行驶的距离可以忽略道路曲率的影响相比于笛卡尔坐标系下的描述更为简洁和直观。 Frenet坐标系和笛卡尔坐标系关系如下
转 http://681314.com/A/asdfasdf
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |