

2018年安徽省机器人大赛单片机与嵌入式系统应用技能竞赛试题(1)
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
目录
一、试题描述
1、任务
设计并制作汽车倒车防撞报警器。开机后屏幕第一行显示“DCFZBJQ”第二行显示“抽签号后4位”如0207并自下而上滚动3秒后停止滚动。画出系统各组件连接图并简要说明画出键盘图并标注各键功能。画出全部程序流程图。
2、基本功能要求
1应用超声波传感器实现距离采集,并在12864点阵屏上显示。利用实验桌面到房顶距离2.65米进行校准。
2能够实现显示有效最远值、最近值存储、查阅和清除。
3能够按键记录当前距离值能计算两次按键所记录距离间的速度并显示。见说明
3、发挥要求
1应用可变电阻通过A/D10位输入3位半数值保留2位小数模拟超声波传感器输入0-10米。
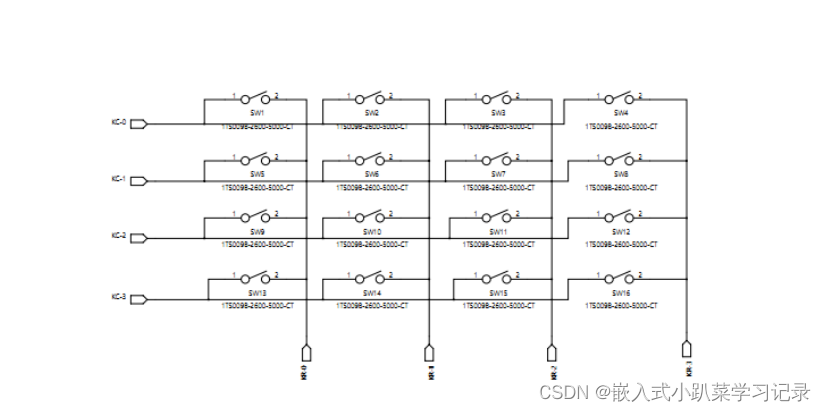
2设计4x4矩阵键盘输入能够设置限定值报警功能并实现声、光报警。
3模拟输入值>1.2米时输出控制电动机正转并实现数值越大转速越快, 数值越小转速越慢并显示速度<0.9米时电机反转<0.5米报警。
4按键实现日期时间显示功能使用单片机定时器实现。
4、说明
1、按照实际使用价值来设计还应当考虑到竞赛评测的时间短问题。
2、速度计算公式v=m/sm-距离米s-时间秒。
3、模拟汽车倒车第一次按键取值记录为第一距离再次按键取值记录为第二距离计算第一距离到第二距离之间的速度。
二、开发板介绍
开发板单片机与嵌入式系统竞赛实训平台
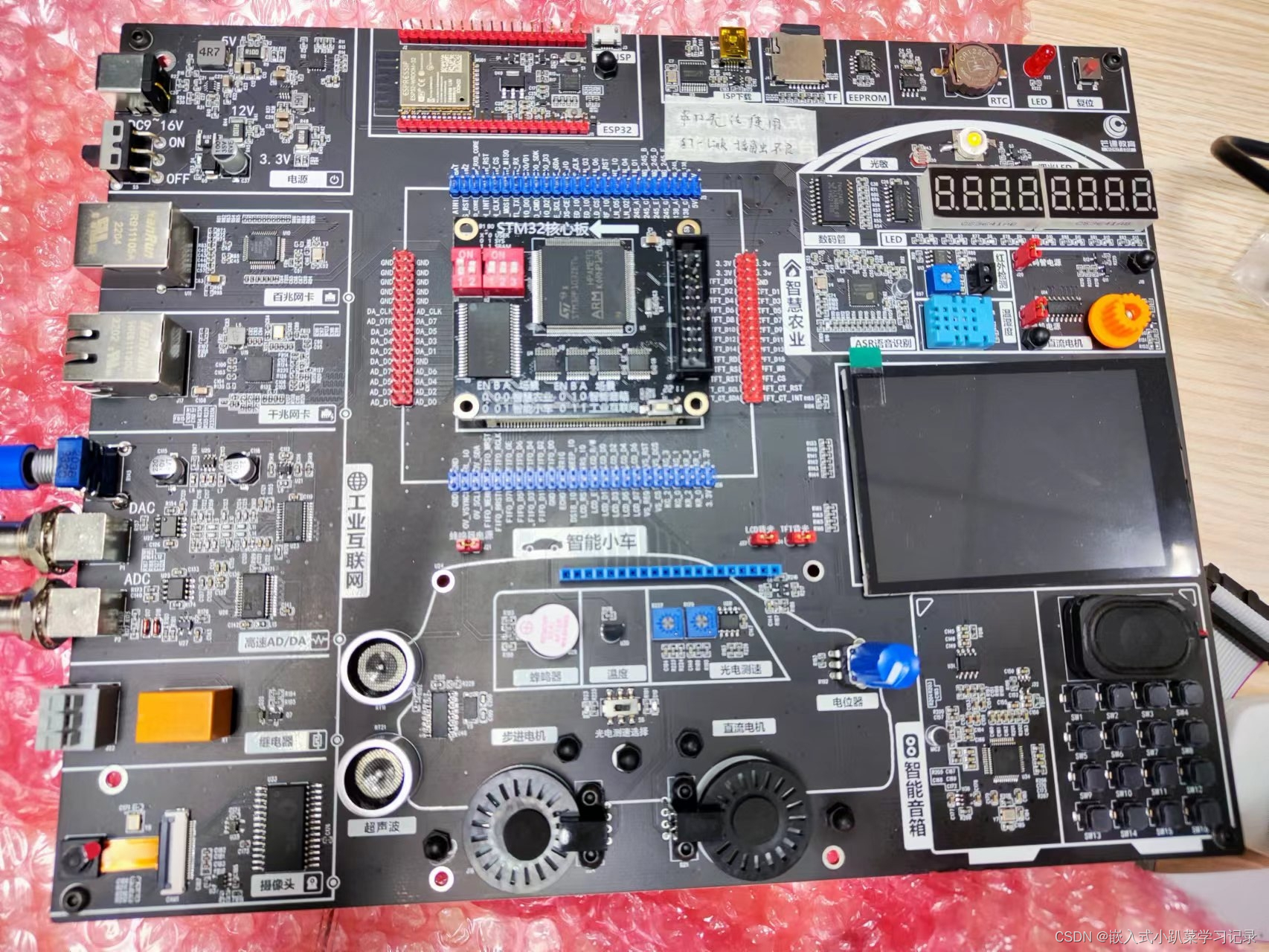
场景功能板按预设应用场景分配硬件接口资源划分为公共资源区、智能农业区、智能小
车区、智能音箱区、工业互联网区共 5 个功能区。各类输入、输出、存储、通信等设备
均按功能区场景进行物理分布并通过直观的印刷文字图形进行区分说明。摒弃了杜邦线
硬件连接的各种弊端可以通过所见所得的方式快速搭建应用系统。
三、所用器件
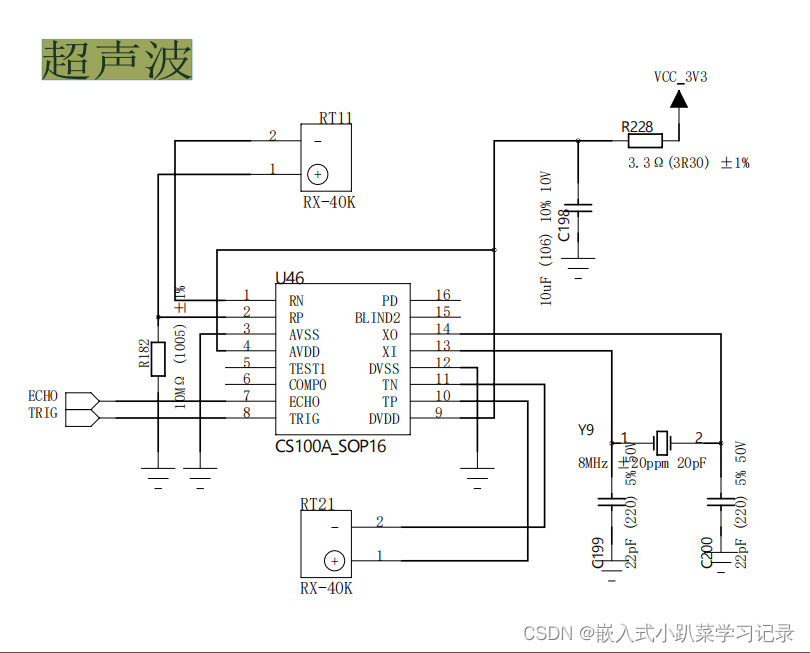
1一个cs100a超声波测距芯片
实现测距效果。
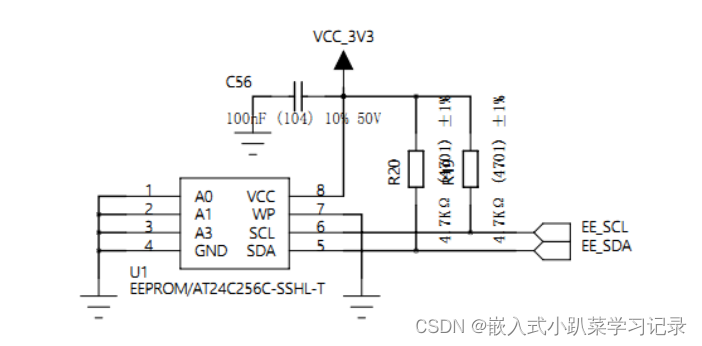
2eeprom
AT24C256
是场景功能板板载的 EEPROM 芯片容量为 256K 字节。用于存储一些掉电不能
丢失的重要数据比如系统设置的一些参数/触摸屏校准数据等。有了这个就可以方便的实
现掉电数据保存。
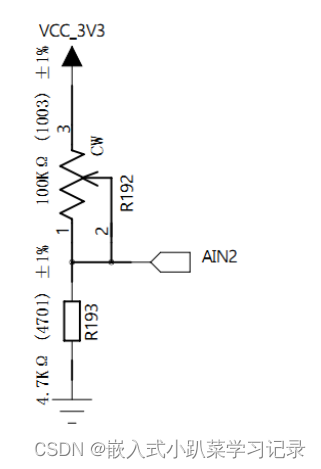
3电位器
电位器可完成 ADC 相关实验。
44*4矩阵键盘
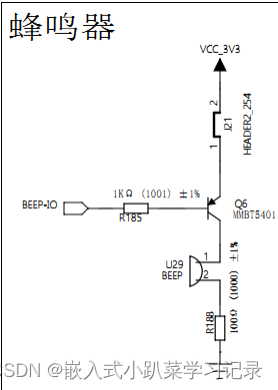
5蜂鸣器
这是场景功能板的板载蜂鸣器BEEP可以实现简单的报警/闹铃等功能。
6led灯
一个LED灯

7步进电机
一个 4 相 5 线步进电机及其驱动电路可完成正反转、加减速等驱动。

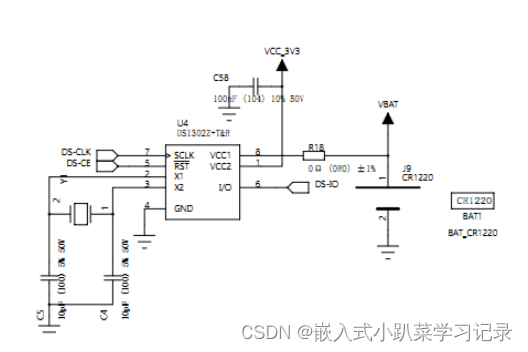
8RTC 实时时钟
主芯片为 DS1302 DS1302 是 DALLAS 公司推出的涓流充电时钟芯片内含有一个实时时
钟/日历和 31 字节静态 RAM通过简单的串行接口与单片机进行通信。
CR1220 电池默认安装了可以给 DS1302 供电同时也可以用来给 STM32 的后备区域
提供能量在外部电源断电的时候维持后备区域数据的存储以及 RTC 的运行。
9所用芯片
stm32zet6

四、主要思路

想得分可以再丰富一下子模块。这只是简单演示总体逻辑
