

Python 图像边缘检测 | 利用 opencv 和 skimage 的 Canny 算法_python图像边缘提取
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
文章目录
CSDN 叶庭云https://yetingyun.blog.csdn.net/
一、简介
提取图片的边缘信息是底层数字图像处理的基本任务之一。边缘信息对进一步提取高层语义信息有很大的影响。大部分边缘检测算法都是上个世纪的了OpenCV 的使用的算法是 Canny 边缘检测算法大概是在 1986 年由 John F. Canny 提出了似乎说明边缘检测算法的研究已经到达了瓶颈期。跟人眼系统相比边缘检测算法仍然逊色不少。
Canny 边缘检测算法是比较出色的算法也是一种多步算法可用于检测任何输入图像的边缘。利用它检测图像边缘时主要有以下步骤
- 应用高斯滤波来平滑图像目的是去除噪声。
- 计算高斯滤波器的导数计算图像像素的梯度得到沿 x x x 和 y y y 维度的梯度。
- 应用非最大抑制non-maximum suppression技术来消除边缘误检本来不是但检测出来是
- 应用双阈值的方法来决定可能的潜在的边界
- 利用滞后阈值方法保留高于梯度幅值的像素忽略低于低阈值的像素实现边缘追踪。
Canny 的目标是找到一个最优的边缘检测算法最优边缘检测的含义是
- 最优检测算法能够尽可能多地标识出图像中的实际边缘漏检真实边缘的概率和误检非边缘的概率都尽可能小
- 最优定位准则检测到的边缘点的位置距离实际边缘点的位置最近或者是由于噪声影响引起检测出的边缘偏离物体的真实边缘的程度最小
- 检测点与边缘点一一对应算子检测的边缘点与实际边缘点应该是一一对应。
为了满足这些要求 Canny 使用了变分法calculus of variations这是一种寻找优化特定功能的函数的方法。最优检测使用四个指数函数项表示它可以由高斯函数的一阶导数来近似。
二、opencv 实践
cv2.Canny(image, threshold1, threshold2, edges=None, apertureSize=None, L2gradient=None):
# 用自定义梯度
cv2.Canny(dx, dy, threshold1, threshold2[, edges[, L2gradient]]) -> edges
- image参表示8位输入图像
- threshold1设置的低阈值
- threshold2设置的高阈值
- edges输出边缘图像单通道8位图像
- apertureSizeSobel算子的大小
- L2gradient一个布尔值如果为真则使用更精确的 L2 范数进行计算(即两个方向的倒数的平方和再开方)否则使用 L1 范数(直接将两个方向导数的绝对值相加)。
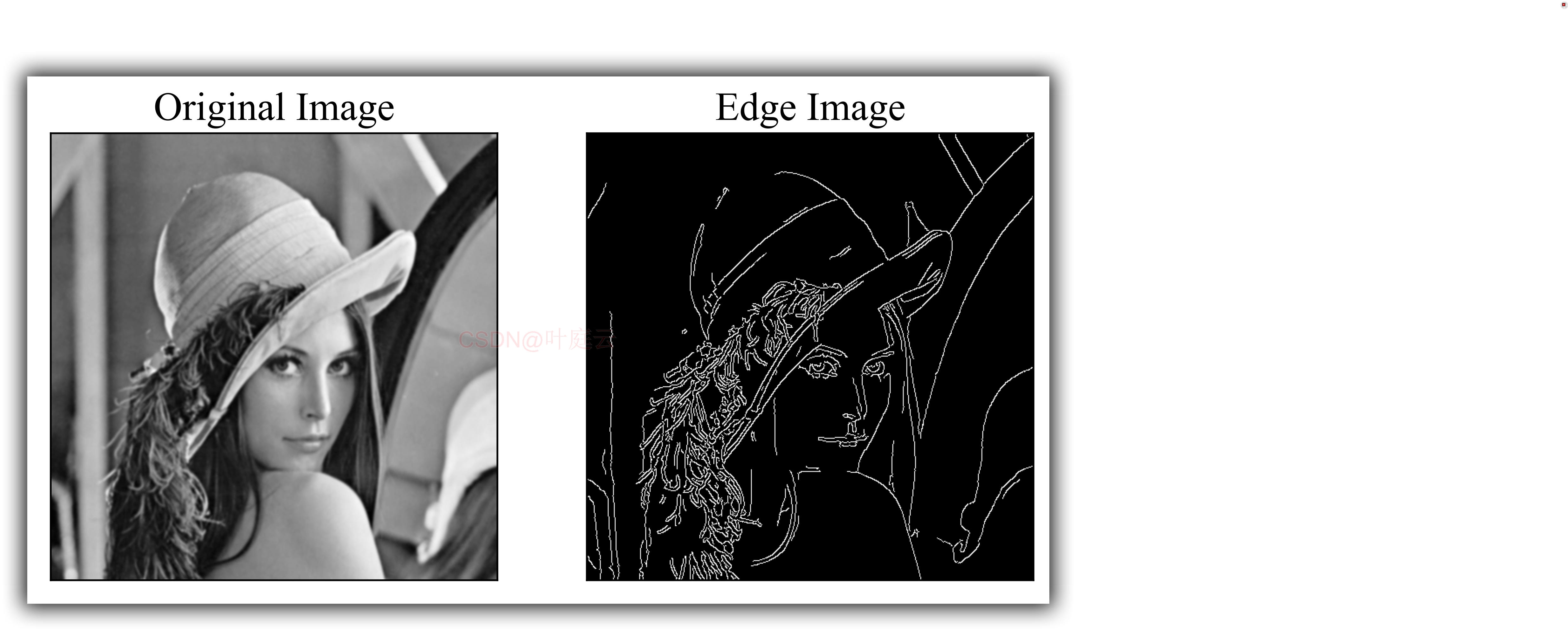
def opencv_canny(image):
# 高斯模糊 降低噪声
blurred = cv.GaussianBlur(image, (5, 5), 0)
# 转为灰度图像
gray = cv.cvtColor(blurred, cv.COLOR_BGR2GRAY)
# 计算x y 方向梯度
grad_x = cv.Sobel(gray, cv.CV_16SC1, 1, 0)
grad_y = cv.Sobel(gray, cv.CV_16SC1, 0, 1)
edge_output = cv.Canny(grad_x, grad_y, 60, 120)
# 英文字体 Times New Roman
plt.rcParams['font.sans-serif'] = ['Times New Roman']
# 可视化结果
plt.figure(figsize=(8, 4), dpi=500)
plt.subplot(121)
plt.imshow(gray, cmap='gray')
plt.title('Original Image', fontsize=18)
plt.xticks([]), plt.yticks([])
plt.subplot(122)
plt.imshow(edge_output, cmap='gray')
plt.title('Edge Image', fontsize=18)
plt.xticks([]), plt.yticks([])
plt.savefig("002.png", dpi=500)
plt.show()
if __name__ == "__main__":
# 读取图像 传入
src = cv.imread("Lenna.png")
opencv_canny(src)
结果如下
三、skimage 实践
import numpy as np
from skimage.io import imread
from skimage.feature import canny
import matplotlib.pyplot as plt
# 读取图像
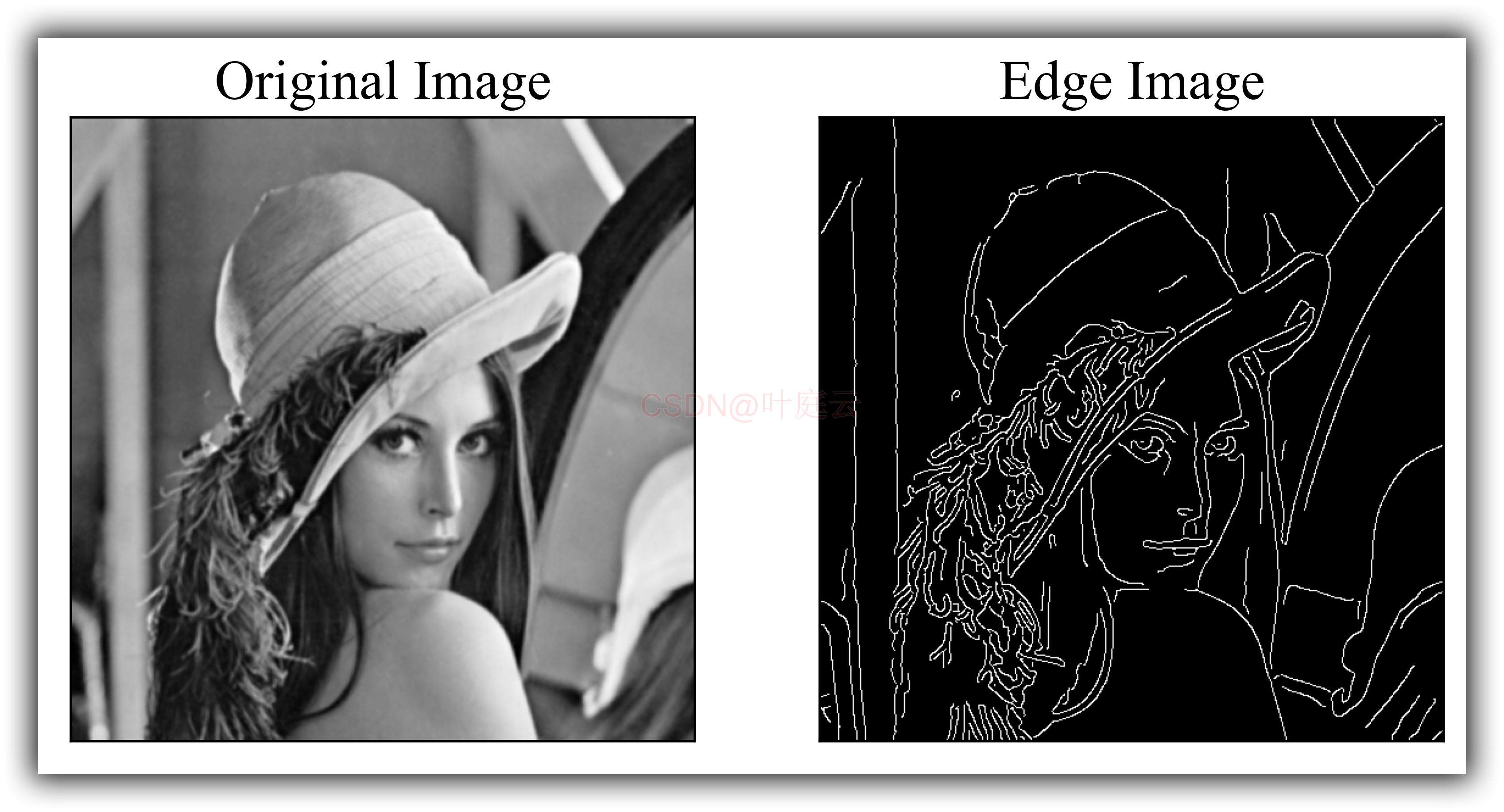
img = imread("Lenna.png", as_gray=True)
# 高斯模糊 降低噪声
img = cv.GaussianBlur(img, (5, 5), 0)
# Canny边缘检测
edges = canny(img, sigma=1.6)
# 可视化结果
plt.rcParams['font.sans-serif'] = ['Times New Roman']
plt.figure(figsize=(8, 4), dpi=500)
plt.subplot(121)
plt.imshow(img, cmap='gray')
plt.title('Original Image', fontsize=18)
plt.xticks([]), plt.yticks([])
plt.subplot(122)
plt.imshow(edges, cmap='gray')
plt.title('Edge Image', fontsize=18)
plt.xticks([]), plt.yticks([])
plt.show()
结果如下
import numpy as np
import matplotlib.pyplot as plt
from scipy import ndimage as ndi
from skimage import feature
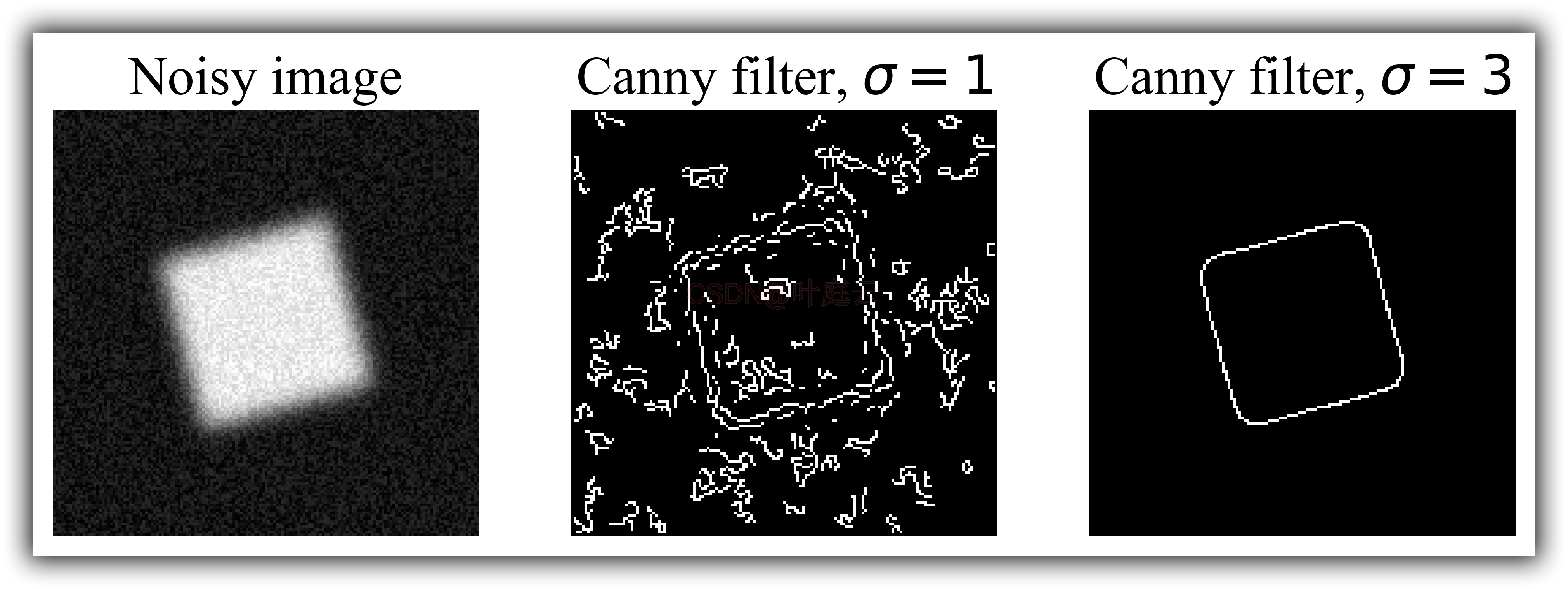
# 产生带有噪声的举行图案
im = np.zeros((128, 128))
im[32:-32, 32:-32] = 1
im = ndi.rotate(im, 15, mode='constant') # 旋转一定角度
im = ndi.gaussian_filter(im, 4)
im += 0.2 * np.random.random(im.shape)
# Compute the Canny filter for two values of sigma
edges1 = feature.canny(im, sigma=1)
edges2 = feature.canny(im, sigma=3)
# display results
fig, (ax1, ax2, ax3) = plt.subplots(nrows=1, ncols=3, figsize=(8, 4),
sharex=True, sharey=True, dpi=500)
ax1.imshow(im, cmap=plt.cm.gray)
ax1.axis('off')
ax1.set_title('Noisy image', fontsize=20)
ax2.imshow(edges1, cmap=plt.cm.gray)
ax2.axis('off')
ax2.set_title(r'Canny filter, $\sigma=1$', fontsize=20)
ax3.imshow(edges2, cmap=plt.cm.gray)
ax3.axis('off')
ax3.set_title(r'Canny filter, $\sigma=3$', fontsize=20)
fig.tight_layout()
plt.show()
结果如下
skimage 库中函数
skimage.feature.canny(image, sigma=1.0,
low_threshold=None, high_threshold=None,
mask=None, use_quantiles=False)
- sigma高斯滤波器的标准差
- low_thresholdCanny算法最后一步中小于该阈值的像素直接置为0
- high_thresholdCanny算法最后一步中大于该阈值的像素直接置为255
参考链接