

基于连续优化的规划算法:以二次规划为例
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
连续优化框架与离散优化框架都是优化方法,都需要针对优化问题设置成本函数,也都是输出一条最优的轨迹/路径(在所设置的成本函数意义下)。那么两者的不同之处在哪?不同之处在于在空间中搜索寻找最优解的方式。离散优化方法的解空间是有限的,允许同时对所有的候选解进行评价。而连续优化方法基于连续的问题空间,采用迭代的形式不断接近最优解。本文利用一个Frenet坐标系下的轨迹规划问题来介绍基于连续优化的规划算法。
一、场景:开车回家的马路边上停着许多车
假定你正开车回家,回家的马路边上零零散散的停着许多车或其它障碍物。例如下面这个场景,你行驶的轨迹大概和下图红色的曲线差不多。
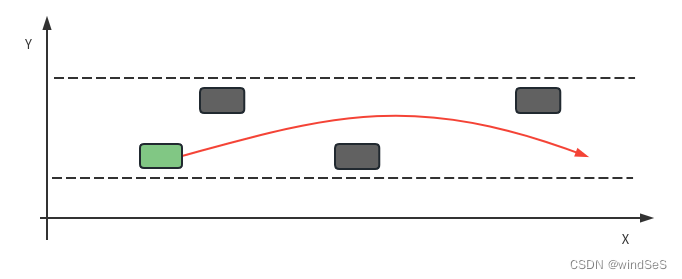
真实环境中的道路不一定都是直线,当存在曲线时,我们可以转换到Frenet坐标系下后,同样可以画的笔直笔直的。本章就不拓展介绍Frenet坐标系了,可以参见本人以下博客:
Frenet坐标系与Cartesian坐标系互转(一):公式推导
Frenet坐标系与Cartesian坐标系互转(二):Python代码函数实现