

【无人机三维路径规划】基于熊气味搜索算法BSSA实现复杂地形无人机避障三维航迹规划附Matlab代码
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
🔥 内容介绍
在无人机领域,如何实现复杂地形下的避障和三维航迹规划一直是一个具有挑战性的问题。为了解决这一问题,研究人员提出了基于熊气味搜索算法(BSSA)的方法,该方法能够有效地实现无人机的避障和航迹规划。本文将介绍基于BSSA的复杂地形无人机避障三维航迹规划算法的步骤。
首先,我们需要了解熊气味搜索算法(BSSA)的基本原理。BSSA是一种基于生物启发的算法,其灵感来源于熊在寻找食物时释放气味并根据气味浓度来调整自己的行动。在BSSA中,无人机会释放一定数量的气味,并根据周围气味的浓度来调整自己的飞行路径,从而实现避障和航迹规划。
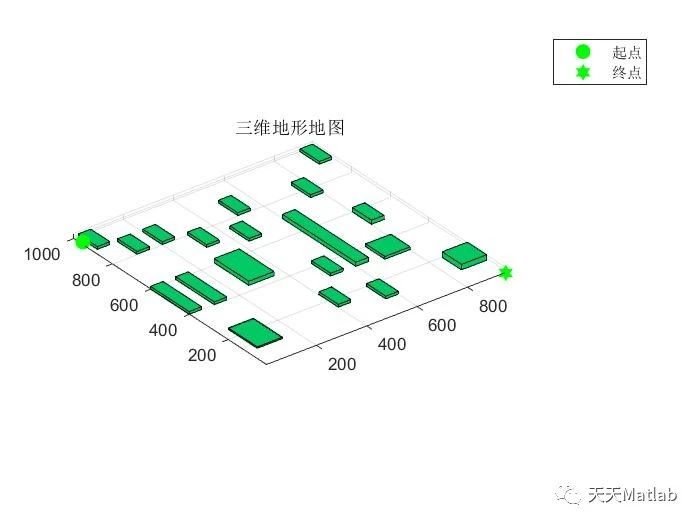
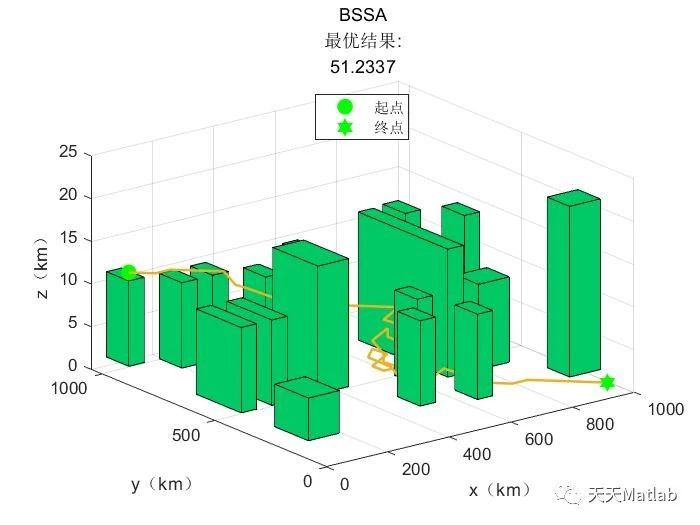
接下来,我们将介绍基于BSSA的复杂地形无人机避障三维航迹规划算法的具体步骤。首先,无人机需要获取周围环境的地形信息,包括高度、障碍物位置等。然后,无人机释放一定数量的气味,并根据周围气味的浓度来调整自己的飞行路径,以避开障碍物并规划出一条安全的航迹。在这个过程中,无人机会不断释放气味,并根据周围环境的变化来调整自己的飞行路径,直到到达目的地。
此外,基于BSSA的复杂地形无人机避障三维航迹规划算法还可以考虑风速、风向等外部环境因素,并对无人机的飞行路径进行进一步优化。通过这种方法,无人机可以有效地避开复杂地形中的障碍物,并规划出一条安全、高效的航迹。
总之,基于熊气味搜索算法(BSSA)的复杂地形无人机避障三维航迹规划算法是一种有效的方法,能够帮助无人机在复杂地形中实现避障和航迹规划。通过不断优化算法和方法,我们相信这种方法将在无人机领域发挥重要作用,为无人机的应用提供更加可靠、安全的保障。
📣 部分代码
function Positions=initialization(SearchAgents_no,dim,ub,lb)
Boundary_no= size(ub,2); % numnber of boundaries
% If the boundaries of all variables are equal and user enter a signle
% number for both ub and lb
if Boundary_no==1
Positions=rand(SearchAgents_no,dim).*(ub-lb)+lb;
end
% If each variable has a different lb and ub
if Boundary_no>1
for i=1:dim
ub_i=ub(i);
lb_i=lb(i);
Positions(:,i)=rand(SearchAgents_no,1).*(ub_i-lb_i)+lb_i;
end
end⛳️ 运行结果
🔗 参考文献
[1] 徐宏飞.面向智慧避障的物流无人机航迹规划研究[D].北京交通大学,2019.
[2] 徐宏飞.面向智慧避障的物流无人机航迹规划研究[J].北京交通大学[2023-11-09].
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码、论文复现、期刊合作、论文辅导及科研仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
2.图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
3 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
4 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化
5 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
6 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
7 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
8 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
9 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |