

汇川编码器介绍
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
一、编码器基础知识及分类
定义编码器将旋转位置的改变转换为电气信号输出
应用场合编码器应用在轴的闭环控制和大多数的自动化过程中。编码器为闭环控制产生速度或位置的实际测量值
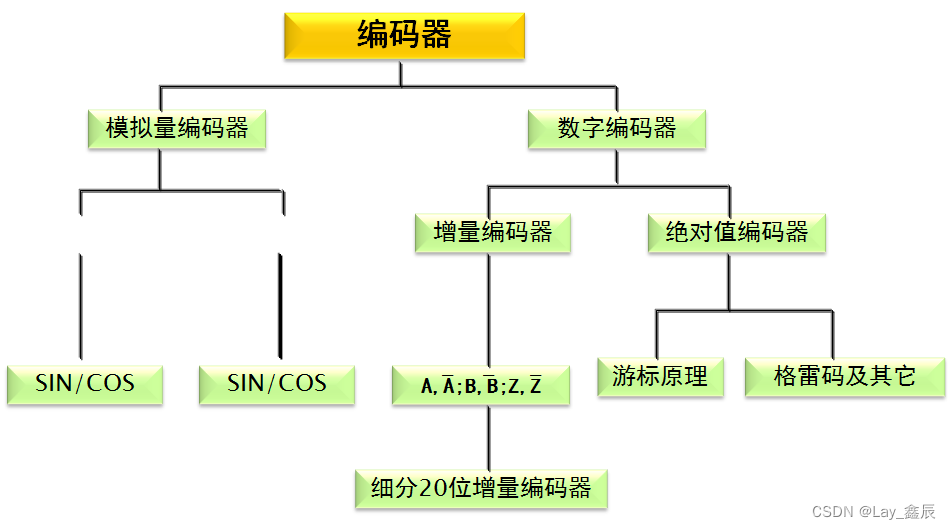 增量编码器速度测量、连续运动、可以回参考点
增量编码器速度测量、连续运动、可以回参考点
绝对值编码器不能回参考点、安全效率高
二、增量式编码器工作原理
分辨率光电编码器的分辨率是以编码器轴转动一周所产生的输出信号基本周期数来表示的即脉冲/转PPR码盘上刻的缝隙越多编码器的物理绝对分辨率就越高
精度编码器输出的信号数据对测量真实角度的准确度对应的参数是角分′、角秒″
差分输出降低电容耦合、消除共模干扰
三、正余弦编码器工作原理
定义输出高质量正弦波供给用户根据需要细分所需分辨率信号达到更高的控制精度
 上图为正余旋编码器的输出模拟信号。驱动器通过AD采集可以得到当前sinθ和cosθ的幅值从而可以反算出θ值。即细分得到的角度信息
上图为正余旋编码器的输出模拟信号。驱动器通过AD采集可以得到当前sinθ和cosθ的幅值从而可以反算出θ值。即细分得到的角度信息
 四、20位增量编码器工作原理
四、20位增量编码器工作原理
原理正余旋编码器只输出放大后的原始模拟信号真正的细分插补是在驱动器里完成的。模拟信号传输容易受到干扰如果我们把细分插补也放在编码器里面并与485总线的形式进行位置信息的传输则可以避免直接模拟信号的传输增强传输的抗干扰性和更远的距离
 如上图角度合成示意图从光栅1转到光栅5的90 °-- 180 °区间。前面可以通过QEP计数得到高11位的位置增量信息。在90 °-- 180 °区间内可以通过模拟信号的采集解算出低8位的位置增量信息
如上图角度合成示意图从光栅1转到光栅5的90 °-- 180 °区间。前面可以通过QEP计数得到高11位的位置增量信息。在90 °-- 180 °区间内可以通过模拟信号的采集解算出低8位的位置增量信息
五、绝对编码器工作原理
定义绝对编码器由机械位置决定的每个位置是唯一的什么时候需要知道位置什么时候就去读取它的位置编码器抗干扰能力
 系统采用游标原理实现单圈绝对位置功能。利用1023\1024\992N\M\S码盘在每个光栅如1024栅格与1023栅格的第10个栅格彼此相同的第X个栅格间有唯一固定范围的相位差值来实现绝对位置的识别原理同游标卡尺。
系统采用游标原理实现单圈绝对位置功能。利用1023\1024\992N\M\S码盘在每个光栅如1024栅格与1023栅格的第10个栅格彼此相同的第X个栅格间有唯一固定范围的相位差值来实现绝对位置的识别原理同游标卡尺。
如1023\1024,在第X个栅格相位差范围为(2π/1023)(X-1)
六、旋转编码器工作原理
针对旋变编码器早期变频器产品线有开发了一个旋变PG卡作为接口板输出接口为SPI接口
 相比于前面得光电编码器旋转编码器更是适用于各种恶劣的外部环境如油污污染大震动环境。这些场合光电编码器的码盘容易受污染使编码器输出幅值变小设置失效。大震动环境容易把码盘震碎尤其是使用玻璃材质的码盘
相比于前面得光电编码器旋转编码器更是适用于各种恶劣的外部环境如油污污染大震动环境。这些场合光电编码器的码盘容易受污染使编码器输出幅值变小设置失效。大震动环境容易把码盘震碎尤其是使用玻璃材质的码盘
旋转变码器的缺点是模拟量传输易受噪音干扰分辨率不高解码芯片1205只有12位分辩率有些场合控制效果不太理想
六、编码器故障说明
Er730故障
- 表现Er.730在伺服运行过程中报出不会影响伺服正常运行属警告故障且只会在使用多圈绝对值编码器中报出
- 机理编码器在正常运行过程中检测3.6V电池电压如果电池低于3V置出一个标志位给伺服报出警告信息
- 解决方式伺服通电状态下更换3.6V电池即可解决
Er731故障
- 表现在多圈绝对值编码器使用过程中当编码器断掉5V电源时没有3.6V电池供电或电池电量不足导致单片机停止工作多圈位置丢失上电后报Er.731故障。此故障只会在使用多圈绝对值编码器时报出
- 机理处理器掉过电导致里面存储的信息丢失。可能原因伺服供电不稳定给编码器供电的5V电源频繁波动或供电有强干扰、电池电量不够
- 解决方式排除电网波动、更换机械抖动小的电源开关更换电池。更换电池上电后把H0D20=2清除故障信息此时原有的多圈位置已丢失无法补救
Er733故障
- 若霍尔状态区域与游标解算的码盘位置区域在对角区域如霍尔计数状态为区域Ⅰ游标解算的码盘位置在区域Ⅲ 则说明计数错误报733
- 若为相邻区域则软件校正不报错
- 解决措施保证供电电压在4.75V以上使用超过20米的长线需要使用粗线缆保证电池不处于低电量