

基于2D Object Detection的目标几何中心三维位置估计(C++)
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
文章目录
介绍
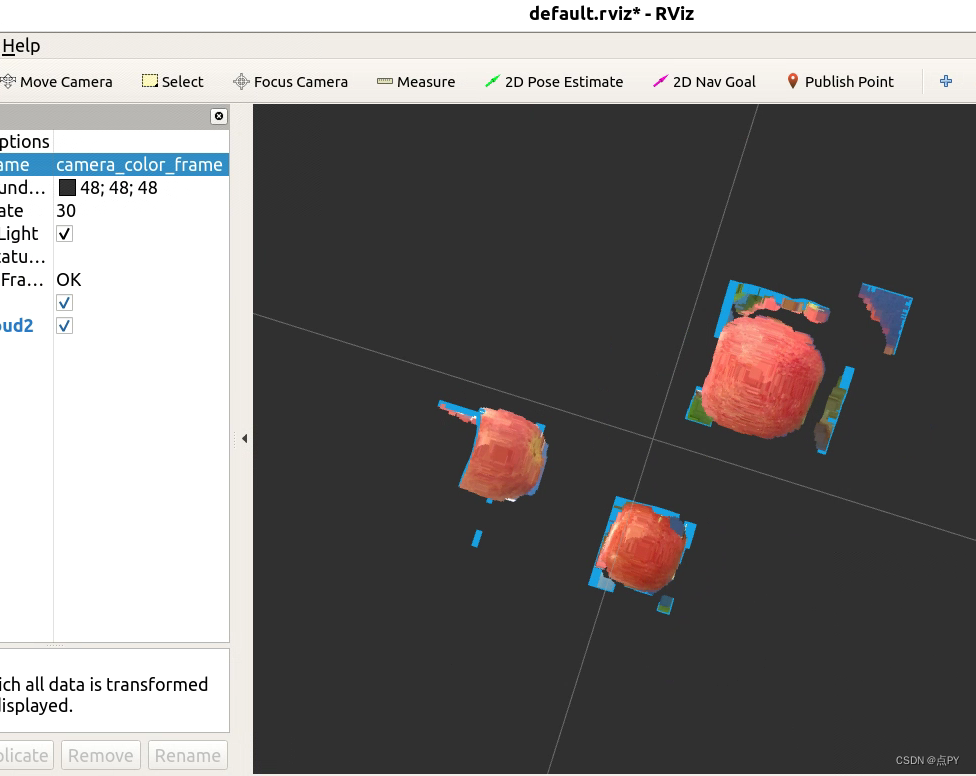
这篇博客将简单讲解下如何利用二维目标检测方法和RGBD数据来获取感兴趣目标的几何中心三位位置结果。
前置知识
为了让博客内容显得简洁些,这里不再介绍前置知识,包括:
- 2D Object Detection
- 订阅Realsense相机
- Onnxruntime模型部署
- 像素坐标变换到相机坐标系
三维位置估计
订阅内参
订阅RGB图像的内参,用于像素坐标转换到相机坐标