

Go map 实现原理
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
Go map 实现原理
go map 源码路径在
src/runtime/map.go
go 源码结构
|– AUTHORS — 文件官方 Go语言作者列表
|– CONTRIBUTORS — 文件第三方贡献者列表
|– LICENSE — 文件Go语言发布授权协议
|– PATENTS — 文件专利
|– README — 文件README文件大家懂的。提一下经常有人说Go官网打不开啊怎么办其实在README中说到了这个。该文件还提到如果通过二进制安装需要设置GOROOT环境变量如果你将Go放在了/usr/local/go中则可以不设置该环境变量Windows下是C:\go。当然建议不管什么时候都设置GOROOT。另外确保$GOROOT/bin在PATH目录中。
|– VERSION — 文件当前Go版本
|– api — 目录包含所有API列表方便IDE使用
|– doc — 目录Go语言的各种文档官网上有的这里基本会有这也就是为什么说可以本地搭建”官网”。这里面有不少其他资源比如gopher图标之类的。
|– favicon.ico — 文件官网logo
|– include — 目录Go 基本工具依赖的库的头文件
|– lib — 目录文档模板
|– misc — 目录其他的一些工具相当于大杂烩大部分是各种编辑器的Go语言支持还有cgo的例子等
|– robots.txt — 文件搜索引擎robots文件
|– src — 目录Go语言源码基本工具编译器等、标准库
`– test — 目录包含很多测试程序并非_test.go方式的单元测试而是包含main包的测试包括一些fixbug测试。可以通过这个学到一些特性的使用。
Map的数据结构
// A header for a Go map.
type hmap struct {
// 元素个数调用 len(map) 时直接返回此值
count int
flags uint8
// buckets 的对数 log_2
B uint8
// overflow 的 bucket 近似数
noverflow uint16
// 计算 key 的哈希的时候会传入哈希函数
hash0 uint32
// 指向 buckets 数组大小为 2^B
// 如果元素个数为0就为 nil
buckets unsafe.Pointer
// 等量扩容的时候buckets 长度和 oldbuckets 相等
// 双倍扩容的时候buckets 长度会是 oldbuckets 的两倍
oldbuckets unsafe.Pointer
// 指示扩容进度小于此地址的 buckets 迁移完成
nevacuate uintptr
extra *mapextra // optional fields
}
// 每个哈希桶bmap结构最多存放8组键值对槽位注意 src/runtime/map.go bmap结构体只有 tophash 字段
type bmap struct {
tophash [bucketCnt]uint8 // 保存高八位 hash快速比较这里高8位不是用来当作key/value在bucket内部的offset的而是作为一个主键在查找时对tophash数组的每一项进行顺序匹配的。先比较hash值高位与bucket的tophash[i]是否相等如果相等则再比较bucket的第i个的key与所给的key是否相等。如果相等则返回其对应的value反之在overflow buckets中按照上述方法继续寻找
keys [bucketCnt] keytype // 保存键
elems [bucketCnt] valuetype // 保存键值
// 存放了对应使用的溢出桶hmap.extra.overflow里的bmap的地址
// 将正常桶hmap.buckets里的bmap关联上溢出桶hmap.extra.overflow的bmap
// 也就是 *bmap
overflow unsafe.Pointer
}
// 溢出桶信息
type mapextra struct {
// 如果 key 和 value 都不包含指针并且可以被 inline(<=128 字节)
// 就使用 hmap的extra字段 来存储 overflow buckets这样可以避免 GC 扫描整个 map
// 然而 bmap.overflow 也是个指针。这时候我们只能把这些 overflow 的指针
// 都放在 hmap.extra.overflow 和 hmap.extra.oldoverflow 中了
// overflow 包含的是 hmap.buckets 的 overflow 的 buckets
// oldoverflow 包含扩容时的 hmap.oldbuckets 的 overflow 的 bucket
// 参考https://liangtian.me/post/go-map
overflow *[]*bmap
oldoverflow *[]*bmap
// 指向预分配的溢出桶里下一个可以使用的bmap
// nextOverflow=nil表示预分配的溢出桶已经满了
nextOverflow *bmap
}
bucketCntBits = 3
bucketCnt = 1 << bucketCntBits // 8
总的来说Go 中的 map 结构是个哈希表不是红黑树。

哈希地址解决冲突一般是
- 线性探测当hash冲突顺序查找下一个位置直到找到一个空位置
- 开放地址法使用某种探测算法在散列表中寻找下一个空的散列地址只要散列表足够大空的散列地址总能找到
- 拉链法使用链表来保存发生hash冲突的key即不同的key有一样的hash值,组成一个链表)
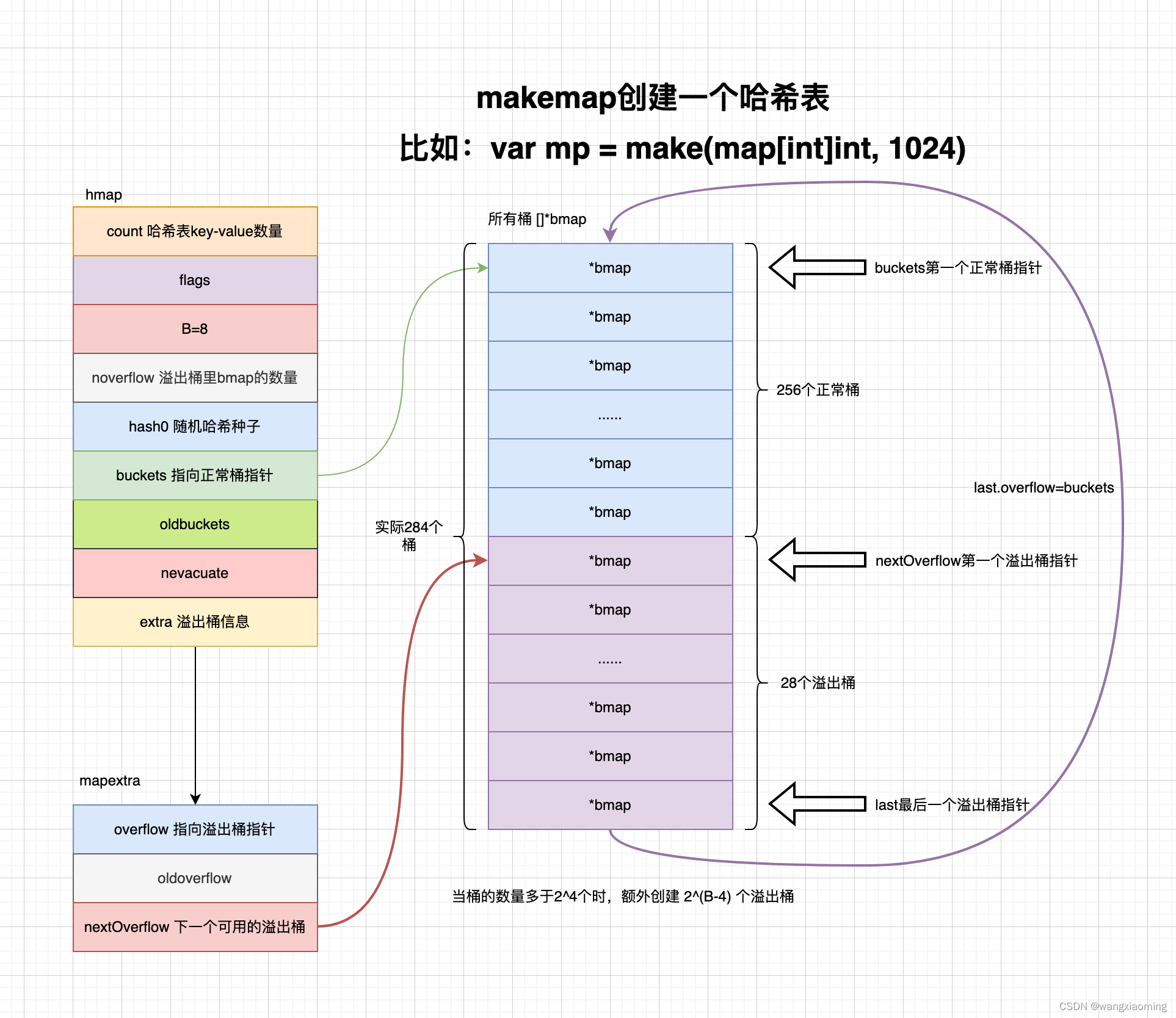
如何构建一个 map
当编译器确定 map 大小不大于 8则通过 makemap_small 构建hmap否则通过 makemap()
// makemap_small implements Go map creation for make(map[k]v) and
// make(map[k]v, hint) when hint is known to be at most bucketCnt
// at compile time and the map needs to be allocated on the heap.
func makemap_small() *hmap {
h := new(hmap)
h.hash0 = fastrand()
return h
}
// hint 表示初始容量
func makemap(t *maptype, hint int, h *hmap) *hmap {
// 内存容量 = 桶个数 * 每个桶大小
mem, overflow := math.MulUintptr(uintptr(hint), t.bucket.size)
if overflow || mem > maxAlloc {
hint = 0
}
if h == nil {
h = new(hmap)
}
// 快速生成随机哈希种子
h.hash0 = fastrand()
// 负载因子
B := uint8(0)
for overLoadFactor(hint, B) {
B++
}
h.B = B
if h.B != 0 {
var nextOverflow *bmap
h.buckets, nextOverflow = makeBucketArray(t, h.B, nil)
// 是否需要溢出桶
if nextOverflow != nil {
h.extra = new(mapextra)
// 关联下一个可以使用的溢出桶
// 也就是之后可以通过 hmap.extra.nextOverflow 快速查找下一个可以使用的溢出桶
h.extra.nextOverflow = nextOverflow
}
}
return h
}
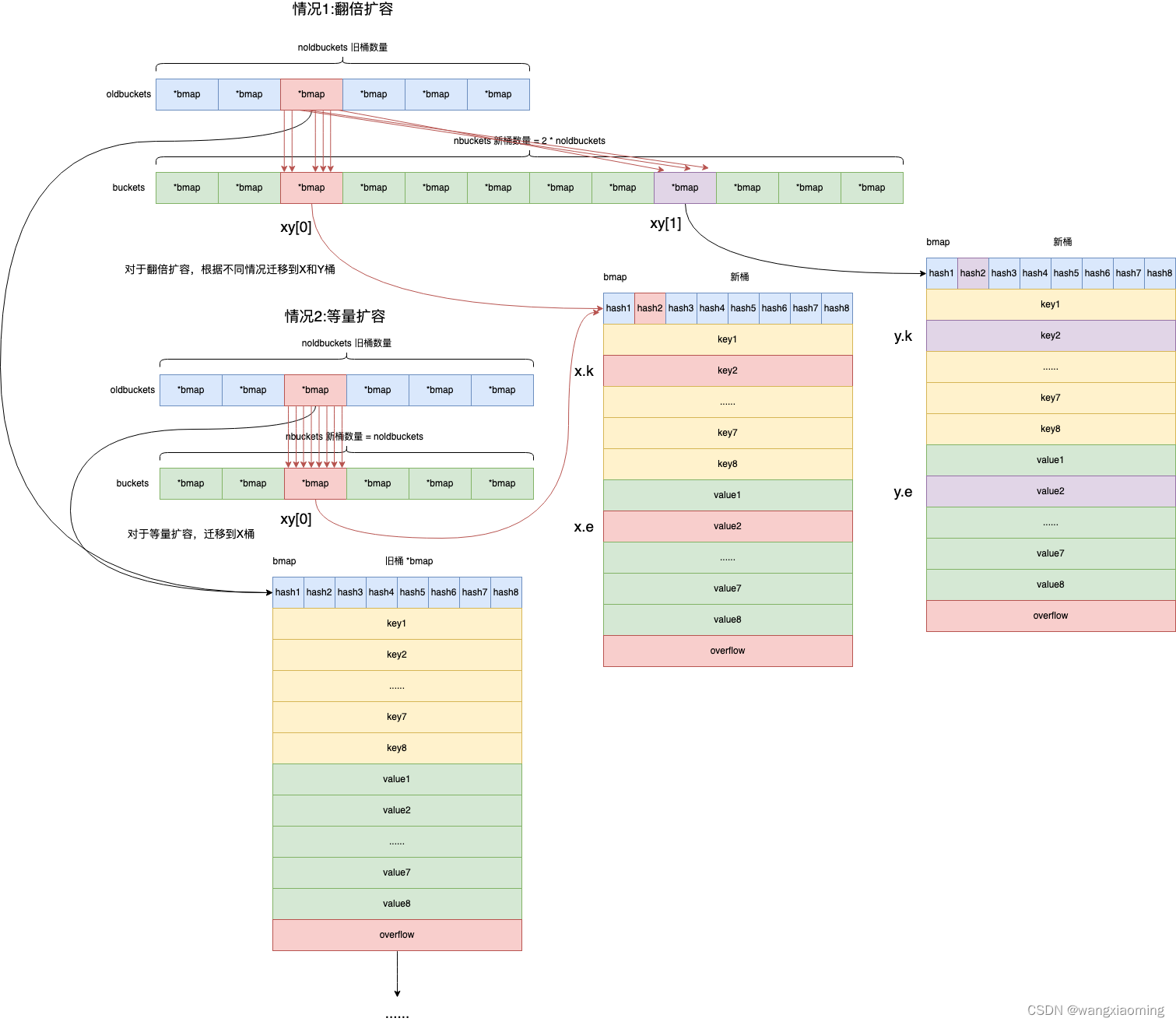
如何扩容
// bucket 表示需要迁移第几个旧桶
func evacuate(t *maptype, h *hmap, oldbucket uintptr) {
// 本次将要迁移的旧桶bmap
b := (*bmap)(add(h.oldbuckets, oldbucket*uintptr(t.bucketsize)))
// 旧桶数量
newbit := h.noldbuckets()
// 旧桶是否已经迁移完成
if !evacuated(b) {
// xy contains the x and y (low and high) evacuation destinations.
var xy [2]evacDst
x := &xy[0]
// 等量时新桶位置
x.b = (*bmap)(add(h.buckets, oldbucket*uintptr(t.bucketsize)))
// 存放在新桶中的key内存地址
x.k = add(unsafe.Pointer(x.b), dataOffset)
// 存放在新桶中的value内存地址
x.e = add(x.k, bucketCnt*uintptr(t.keysize))
// 翻倍扩容
if !h.sameSizeGrow() {
// Only calculate y pointers if we're growing bigger.
// Otherwise GC can see bad pointers.
y := &xy[1]
// 数量翻倍后的新桶位置
y.b = (*bmap)(add(h.buckets, (oldbucket+newbit)*uintptr(t.bucketsize)))
// 存放在新桶中的key内存地址
y.k = add(unsafe.Pointer(y.b), dataOffset)
// 存放在新桶中的value内存地址
y.e = add(y.k, bucketCnt*uintptr(t.keysize))
}
// 遍历所有旧桶正常桶和溢出桶将每一个桶的key-value迁移到新桶
for ; b != nil; b = b.overflow(t) {
// 获取旧桶bmap中keys内存起始地址
k := add(unsafe.Pointer(b), dataOffset)
// 获取旧桶bmap中values内存起始地址
e := add(k, bucketCnt*uintptr(t.keysize))
// 遍历8个槽位获取对应槽位上的 tophash-key-value
for i := 0; i < bucketCnt; i, k, e = i+1, add(k, uintptr(t.keysize)), add(e, uintptr(t.elemsize)) {
top := b.tophash[i]
// 空槽位
if isEmpty(top) {
// 标记该槽位迁移后为空即没有key-value需要迁移
b.tophash[i] = evacuatedEmpty
continue
}
if top < minTopHash {
throw("bad map state")
}
// 获取key
k2 := k
if t.indirectkey() {
k2 = *((*unsafe.Pointer)(k2))
}
var useY uint8
// 翻倍扩容
if !h.sameSizeGrow() {
// Compute hash to make our evacuation decision (whether we need
// to send this key/elem to bucket x or bucket y).
// 计算key哈希值也就是key位于哪一个桶
hash := t.hasher(k2, uintptr(h.hash0))
if h.flags&iterator != 0 && !t.reflexivekey() && !t.key.equal(k2, k2) {
// If key != key (NaNs), then the hash could be (and probably
// will be) entirely different from the old hash. Moreover,
// it isn't reproducible. Reproducibility is required in the
// presence of iterators, as our evacuation decision must
// match whatever decision the iterator made.
// Fortunately, we have the freedom to send these keys either
// way. Also, tophash is meaningless for these kinds of keys.
// We let the low bit of tophash drive the evacuation decision.
// We recompute a new random tophash for the next level so
// these keys will get evenly distributed across all buckets
// after multiple grows.
// 当遇到math.NaN()的key时由tophash最低位决定迁移到X或者Y桶
// 因为使用math.Nan()作为key每次求hash都是不一样的。
useY = top & 1
// 重新计算tophash
top = tophash(hash)
} else {
// 是否可以将数据存放在翻倍后的Y桶位置
if hash&newbit != 0 {
useY = 1
}
}
}
if evacuatedX+1 != evacuatedY || evacuatedX^1 != evacuatedY {
throw("bad evacuatedN")
}
// 标记当前旧桶对应槽位迁移到哪个目标桶是X还是Y
b.tophash[i] = evacuatedX + useY // evacuatedX + 1 == evacuatedY
// 迁移到目标桶
dst := &xy[useY] // evacuation destination
// 迁移目标桶槽位满了
if dst.i == bucketCnt {
// 创建一个溢出桶
dst.b = h.newoverflow(t, dst.b)
dst.i = 0
dst.k = add(unsafe.Pointer(dst.b), dataOffset)
dst.e = add(dst.k, bucketCnt*uintptr(t.keysize))
}
// 记录tophash
dst.b.tophash[dst.i&(bucketCnt-1)] = top // mask dst.i as an optimization, to avoid a bounds check
// 迁移key复制内存中的值
if t.indirectkey() {
*(*unsafe.Pointer)(dst.k) = k2 // copy pointer
} else {
typedmemmove(t.key, dst.k, k) // copy elem
}
// 迁移value复制内存中的值
if t.indirectelem() {
*(*unsafe.Pointer)(dst.e) = *(*unsafe.Pointer)(e)
} else {
typedmemmove(t.elem, dst.e, e)
}
// 继续迁移当前桶的下一个 key-value槽位
dst.i++
dst.k = add(dst.k, uintptr(t.keysize))
dst.e = add(dst.e, uintptr(t.elemsize))
}
}
// 迁移完成清空旧桶bmap中的keys和values
if h.flags&oldIterator == 0 && t.bucket.ptrdata != 0 {
b := add(h.oldbuckets, oldbucket*uintptr(t.bucketsize))
// keys起始内存地址
ptr := add(b, dataOffset)
// 所有的keys和values字节
n := uintptr(t.bucketsize) - dataOffset
memclrHasPointers(ptr, n)
}
}
if oldbucket == h.nevacuate {
advanceEvacuationMark(h, t, newbit)
}
}
如何查找
- 根据
key计算出hash值。 - 如果存在
old bucket, 首先在old bucket中查找如果找到的bucket已经evacuated转到步骤3。 反之返回其对应的value。 - 在
new buckets中查找对应的value。
查找代码如下
func mapaccess1(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
if raceenabled && h != nil {
callerpc := getcallerpc()
pc := funcPC(mapaccess1)
racereadpc(unsafe.Pointer(h), callerpc, pc)
raceReadObjectPC(t.key, key, callerpc, pc)
}
if msanenabled && h != nil {
msanread(key, t.key.size)
}
if h == nil || h.count == 0 {
if t.hashMightPanic() {
t.hasher(key, 0) // see issue 23734
}
return unsafe.Pointer(&zeroVal[0])
}
if h.flags&hashWriting != 0 {
throw("concurrent map read and map write")
}
// 1. 根据`key`计算出`hash`值
hash := t.hasher(key, uintptr(h.hash0))
m := bucketMask(h.B)
b := (*bmap)(add(h.buckets, (hash&m)*uintptr(t.bucketsize)))
// 2. 如果存在`old bucket`, 首先在`old bucket`中查找如果找到的`bucket`已经`evacuated`从 new buckets 中查找。 反之返回其对应的`value`
if c := h.oldbuckets; c != nil {
if !h.sameSizeGrow() {
// There used to be half as many buckets; mask down one more power of two.
m >>= 1
}
oldb := (*bmap)(add(c, (hash&m)*uintptr(t.bucketsize)))
if !evacuated(oldb) {
b = oldb
}
}
top := tophash(hash)
bucketloop:
for ; b != nil; b = b.overflow(t) {
for i := uintptr(0); i < bucketCnt; i++ {
if b.tophash[i] != top {
if b.tophash[i] == emptyRest {
break bucketloop
}
continue
}
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
if t.indirectkey() {
k = *((*unsafe.Pointer)(k))
}
if t.key.equal(key, k) {
e := add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
if t.indirectelem() {
e = *((*unsafe.Pointer)(e))
}
return e
}
}
}
return unsafe.Pointer(&zeroVal[0])
}
mapaccess2
该函数大部分逻辑处理和mapaccess1一样不过返回的是一个value指针和boolbool用于指示该key是否存在。
mapaccessK
当通过语法 for k, v := range h {} 遍历map时Go会在编译期间调用 mapaccessK 。遍历逻辑还是和mapaccess1一样该函数返回两个指针分别表示键和值的地址
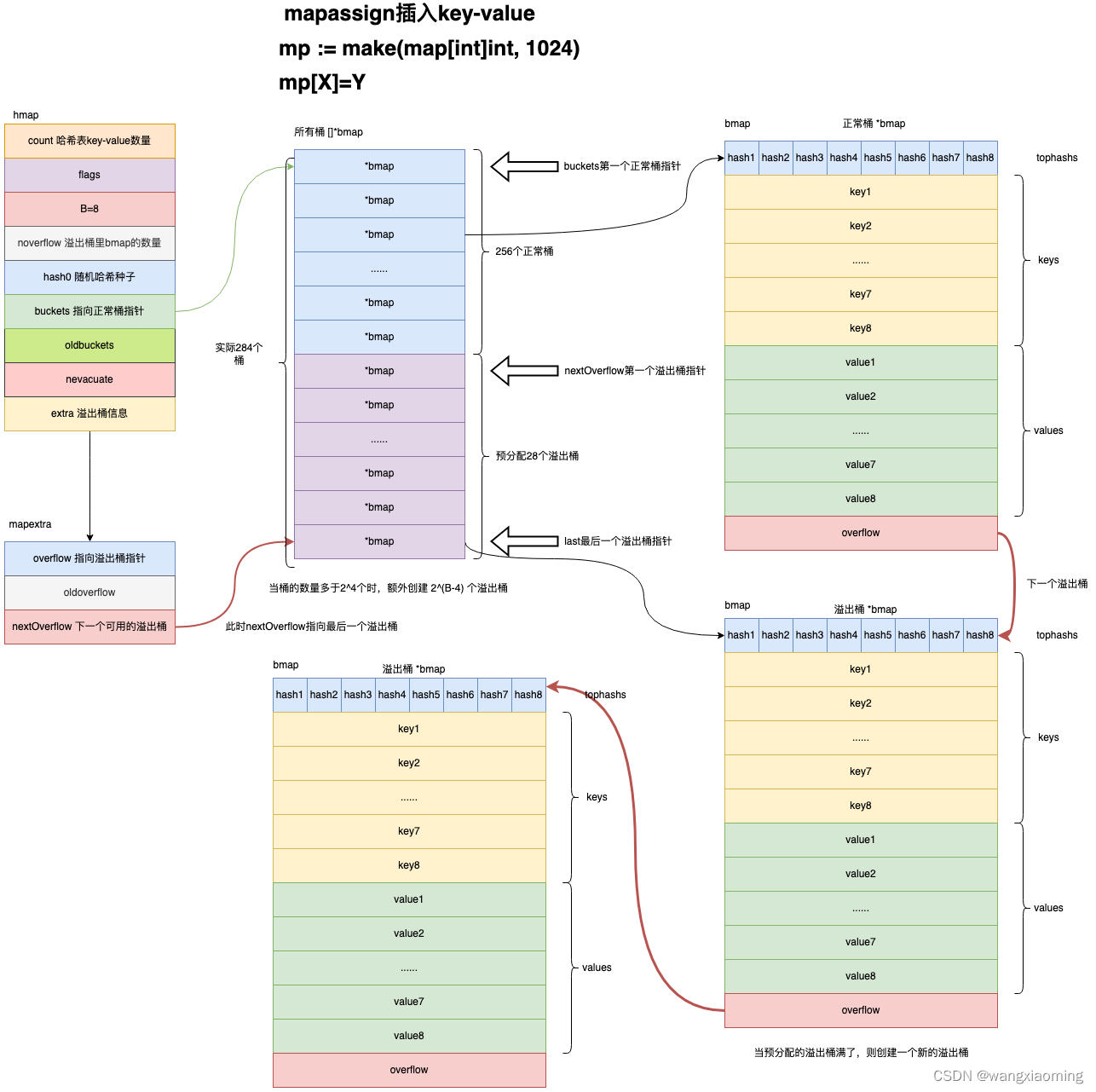
如何插入
Go 不能往将 nil 数据写入到 map 中会报错 panic: assignment to entry in nil map 但是却可以读取一个nil 的 map这个比较奇怪吧
func mapassign(t *maptype, h *hmap, key unsafe.Pointer) unsafe.Pointer {
...
// 计算key的哈希值
hash := t.hasher(key, uintptr(h.hash0))
// 添加 hashWriting 标志位防止并发写情况下其他goroutine读取map
h.flags ^= hashWriting
if h.buckets == nil {
h.buckets = newobject(t.bucket) // newarray(t.bucket, 1)
}
again:
// key映射到哪一个桶
bucket := hash & bucketMask(h.B)
// 如果正在扩容则在每一次写入时迁移一部分旧桶数据到新桶中
if h.growing() {
growWork(t, h, bucket)
// 当旧桶中的数据迁移到新桶后
// 就可以继续通过 h.buckets 访问新桶中的数据
}
// 获取key在buckets中对应的bmap桶
b := (*bmap)(add(h.buckets, bucket*uintptr(t.bucketsize)))
// 计算key哈希值高8位
top := tophash(hash)
// 存放要修改的tophash、key、value引用
var inserti *uint8
var insertk unsafe.Pointer
var elem unsafe.Pointer
// 遍历正常桶和所有溢出桶中的对应bmap
bucketloop:
for {
// 遍历bmap的所有tophash/keys/values
for i := uintptr(0); i < bucketCnt; i++ {
if b.tophash[i] != top {
// 该位置为空可插入
if isEmpty(b.tophash[i]) && inserti == nil {
inserti = &b.tophash[i]
insertk = add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
elem = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
}
// 桶为空
if b.tophash[i] == emptyRest {
break bucketloop
}
continue
}
// 获取该位置的key指针
k := add(unsafe.Pointer(b), dataOffset+i*uintptr(t.keysize))
if t.indirectkey() {
k = *((*unsafe.Pointer)(k))
}
// key不相同则遍历下一个位置
if !t.key.equal(key, k) {
continue
}
...
// 获取该位置的value指针
elem = add(unsafe.Pointer(b), dataOffset+bucketCnt*uintptr(t.keysize)+i*uintptr(t.elemsize))
goto done
}
// 遍历下一个溢出桶
ovf := b.overflow(t)
// 结束
if ovf == nil {
break
}
b = ovf
}
// 是否需要扩容
if !h.growing() && (overLoadFactor(h.count+1, h.B) || tooManyOverflowBuckets(h.noverflow, h.B)) {
hashGrow(t, h)
goto again // Growing the table invalidates everything, so try again
}
// inserti = nil 说明bmap桶已经满了, 找不到插入槽位
if inserti == nil {
// 创建一个新的溢出桶bmap并关联到hmap.extra.overflow溢出桶中
newb := h.newoverflow(t, b)
// 使用新的溢出桶存放 tophash-key-value
inserti = &newb.tophash[0]
insertk = add(unsafe.Pointer(newb), dataOffset)
elem = add(insertk, bucketCnt*uintptr(t.keysize))
}
if t.indirectkey() {
// 为key分配新的内存
kmem := newobject(t.key)
*(*unsafe.Pointer)(insertk) = kmem
insertk = kmem
}
if t.indirectelem() {
// 为value分配新的内存
vmem := newobject(t.elem)
*(*unsafe.Pointer)(elem) = vmem
}
// 将key保存到对应的位置
typedmemmove(t.key, insertk, key)
// 存储tophash
*inserti = top
// 数量+1
h.count++
done:
if h.flags&hashWriting == 0 {
throw("concurrent map writes")
}
// 取消并发写标志
h.flags &^= hashWriting
// 解引用返回 unsafe.Pointer 指针类型
if t.indirectelem() {
elem = *((*unsafe.Pointer)(elem))
}
return elem
}
插入逻辑还有个寻找溢出桶的逻辑 newoverflow 这个函数在前面的
newoverflow 主要流程如下
如何删除
参考资料
- https://github.com/wangxiaoming/go
- https://www.joxrays.com/go-map/
- https://tiancaiamao.gitbooks.io/go-internals/content/zh/02.3.html