

智能车竞赛:Infineon TC264单片机使用总结&快速入门_tc264
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
本文主要是为了备赛第十八届全国大学生智能车竞赛基于逐飞开源库和芯片数据手册的一些学习总结使用英飞凌官方的AURIX Development Studio开发环境。
正如STM32的开发方式有标准库和HAL库Infineon单片机也有官方库而逐飞开源库则是在官方库的基础上又封装了一层变成了易使用、易理解的API极大的方便我们调用和编写程序。
那么对于智能车比赛必须熟练掌握的内容有GPIO、定时器、外部中断、中断函数入口和优先级、串口的发送与接收、如何产生PWM、ADC、如何读取正交编码器
目录
GPIO使用——点灯与按键检测
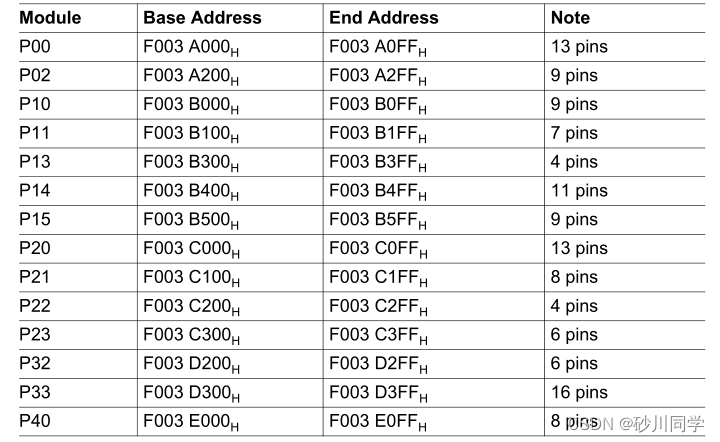
由芯片参考手册可知TC264的GPIO端口号并不是连续的每个端口号的引脚数目也不相同。但是在逐飞库中每个端口号都定义了16个引脚。
特别提醒在设置IO时请自行根据硬件确认当前芯片是否具有此IO
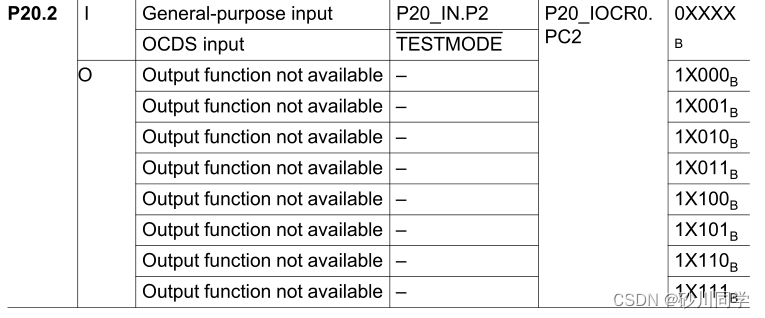
需要注意仅P20_2是不能用于输出的仅仅只有输入的功能
TC264DA芯片的21.6无法正常使用。这点是逐飞开源库中标注的但是芯片手册中并未指出暂时不知道具体原因。
下面介绍几个常用的API函数
- 引脚初始化void gpio_init (gpio_pin_enum pin, gpio_dir_enum dir, uint8 dat, gpio_mode_enum pinmode)
- 设置引脚输出电平void gpio_set_level (gpio_pin_enum pin, uint8 dat)
- 获取引脚输入电平uint8 gpio_get_level (gpio_pin_enum pin)
- 翻转引脚电平void gpio_toggle_level (gpio_pin_enum pin)
在初始化引脚的函数中对引脚电平的设置只在引脚设置为输出模式GPO下才有用
pinmode主要有
typedef enum
{
GPI_FLOATING_IN, // 定义管脚浮空输入
GPI_PULL_UP , // 定义管脚上拉输入
GPI_PULL_DOWN , // 定义管脚下拉输入GPO_PUSH_PULL , // 定义管脚推挽输出
GPO_OPEN_DTAIN , // 定义管脚开漏输出
}gpio_mode_enum;
具体可以参考这篇文章【STM32】STM32F4 GPIO八种模式及工作原理详解
PIT产生简单的定时中断
常用API函数有
- 初始化PIT定时器void pit_init (pit_index_enum pit_index, uint32 time)
- 对pit_init的封装方便设置ms级定时器中断pit_ms_init(pit_index, time)
- 对pit_init的封装方便设置us级定时器中断pit_us_init(pit_index, time)
Infineon单片机中并没有PIT外设这些函数是对官方库中CCU6模块的封装
在初始化函数中由这句restoreInterrupts(interrupt_state);开启中断
由这句IfxCcu6_Timer_start(&g_Ccu6Timer);开启定时器
所以我们不需要自己手动开启但是要关闭的话得手动关闭
void pit_close (pit_index_enum pit_index);
void pit_start (pit_index_enum pit_index);
void pit_all_close (void);
void pit_disable (pit_index_enum pit_index);
void pit_enable (pit_index_enum pit_index);
如果是简单的延时可以调用systick函数
中断函数入口和优先级
逐飞的工程目录如下
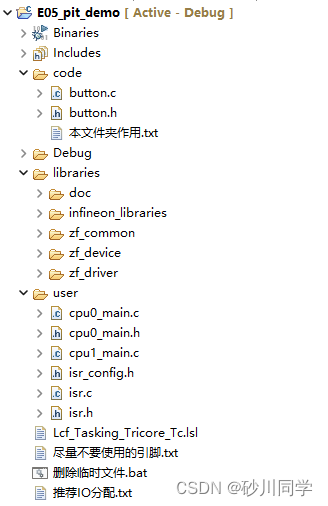
其中code文件夹是我们存放自己编写的.c、.h文件libraries是库文件不需要改动user文件夹下isr.c中是所有的中断处理函数入口可以直接类比到STM32的IRQHandler函数
并且逐飞已经添加了去除中断标志的函数我们使用时可以直接把这部分复制到main.c中然后进行后续开发。
isr_config.h文件下是所有中断的优先级定义和决定中断由谁处理
TC264是双核的芯片但是如何在不出错的情况下合理使用两个CPU笔者还未研究目前只使用CPU0
特别注意所有中断优先级都必须设置为不一样的值TC264具有255个中断优先级可以设置
1-2550优先级表示不开启中断255为最高优先级

下面举一个利用状态机进行按键检测的例子主要涉及GPIO的基础API、PIT的20ms定时中断。这样完成的按键检测既实现了消抖也不会让CPU空等。如果利用外部中断进行按键检测如果按键长按可能多次进入中断或者必须在中断函数中等待按键松开。
typedef enum
{
KEY_CHECK = 0, //按键检测状态
KEY_COMFIRM, //按键确认状态
KEY_UNPRESSED //按键释放状态
}keyState_e; //状态枚举变量
typedef struct
{
keyState_e keyState; //按键状态
uint8 keyFlag; //按键按下标志
}key_t; //按键状态结构体
key_t Key[4];
void KeyCheck(int i, key_t *Key, gpio_pin_enum pin)
{
switch( Key[i].keyState )
{
case KEY_CHECK:
// 读到低电平进入按键确认状态
if(gpio_get_level(pin) == GPIO_LOW)
{
Key[i].keyState = KEY_COMFIRM;
}
break;
case KEY_COMFIRM:
if(gpio_get_level(pin) == GPIO_LOW)
{
//读到低电平按键确实按下按键标志位置1并进入按键释放状态
Key[i].keyState = KEY_UNPRESSED;
Key[i].keyFlag = 1;
}
//读到高电平可能是干扰信号返回初始状态
else
{
Key[i].keyState = KEY_CHECK;
}
break;
case KEY_UNPRESSED:
if(gpio_get_level(pin) == GPIO_HIGH)
{
// 读到高电平说明按键释放返回初始状态
Key[i].keyState = KEY_CHECK;
}
break;
default: break;
}
}
int core0_main(void)
{
//定义变量
uint8 i;
clock_init(); // 获取时钟频率<务必保留>
debug_init(); // 初始化默认调试串口
// 此处编写用户代码 例如外设初始化代码等
//由于逐飞的母版上按键电路有电阻上拉到高电平所有GPIO设置为浮空输入即可
gpio_init(BUTTON1, GPI, GPIO_LOW, GPI_FLOATING_IN);
gpio_init(BUTTON2, GPI, GPIO_LOW, GPI_FLOATING_IN);
gpio_init(BUTTON3, GPI, GPIO_LOW, GPI_FLOATING_IN);
gpio_init(BUTTON4, GPI, GPIO_LOW, GPI_FLOATING_IN);
pit_ms_init(PIT_NUM, 20); // 初始化 CCU6_0_CH0 为周期中断
// 此处编写用户代码 例如外设初始化代码等
cpu_wait_event_ready(); // 等待所有核心初始化完毕
while (TRUE)
{
// 此处编写需要循环执行的代码
if(pit_state)
{
KeyCheck(0,Key,BUTTON1);
KeyCheck(1,Key,BUTTON2);
KeyCheck(2,Key,BUTTON3);
KeyCheck(3,Key,BUTTON4);
pit_state = 0; // 清空周期中断触发标志位
}
for(i = 0;i<4;i++)
{
if(Key[i].keyFlag == 1)
{
printf("button %d pressed!\n",i);
Key[i].keyFlag = 0; //清除按键按下标志
}
}
}
}
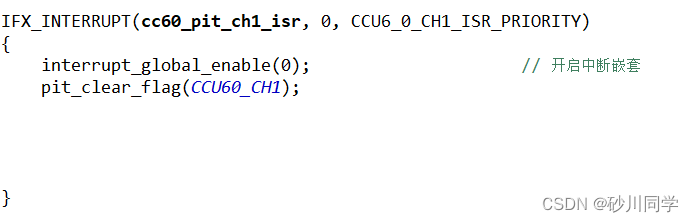
IFX_INTERRUPT(cc60_pit_ch0_isr, 0, CCU6_0_CH0_ISR_PRIORITY)
{
interrupt_global_enable(0); // 开启中断嵌套
pit_clear_flag(CCU60_CH0);
pit_state = 1;
}串口的收发——接收数据并解析上位机调试
在debug_init函数中逐飞已经完成了默认串口的初始化默认的串口是

串口发送数据很简单逐飞库已经完成了printf函数的重定向可以直接调用printf函数
或者使用如下函数
void uart_write_byte_wait (uart_index_enum uart_n, const uint8 dat);
void uart_write_byte (uart_index_enum uartn, const uint8 dat);
void uart_write_buffer (uart_index_enum uartn, const uint8 *buff, uint32 len);
void uart_write_string (uart_index_enum uartn, const char *str);
接收数据是比较难且重要的一部分因为使用上位机调试或者蓝牙和wifi等都需要串口能正确接收我们发送的数据并解析
本文仅讨论接收定长数据并解析因为我们调试的过程中一般会按固定的格式发送
主要思路为开启串口接收中断把读到的数据先存入fifo当读到指定数目后进入checkCmd函数检查格式如果格式正确就进入usart_analysis
注意处理完毕要及时清空接受数组在进行下一次接收
如果有更好的思路欢迎分享
#define UART_INDEX (DEBUG_UART_INDEX ) // 默认 UART_0
#define UART_BAUDRATE (DEBUG_UART_BAUDRATE) // 默认 115200
#define UART_TX_PIN (DEBUG_UART_TX_PIN ) // 默认 UART0_TX_P14_0
#define UART_RX_PIN (DEBUG_UART_RX_PIN ) // 默认 UART0_RX_P14_1
#define LED1 P20_9
uint8 uart_get_data[64]; // 串口接收数据缓冲区
uint8 fifo_get_data[64]; // fifo 输出读出缓冲区
uint8 get_data = 0; // 接收数据变量
uint32 fifo_data_count = 0; // fifo 数据个数
fifo_struct uart_data_fifo;
int core0_main(void)
{
clock_init(); // 获取时钟频率<务必保留>
debug_init(); // 初始化默认调试串口
// 此处编写用户代码 例如外设初始化代码等
fifo_init(&uart_data_fifo, FIFO_DATA_8BIT, uart_get_data, 64); // 初始化 fifo 挂载缓冲区
gpio_init(LED1, GPO, GPIO_HIGH, GPO_OPEN_DTAIN);
uart_rx_interrupt(UART_INDEX, 1); // 开启 UART_INDEX 的接收中断
cpu_wait_event_ready(); // 等待所有核心初始化完毕
while (TRUE)
{
// 此处编写需要循环执行的代码
}
}
_Bool checkCmd(uint8_t* str)
{
//仅作举例 CNBR:A392:200202120000 蓝桥杯误入
if((str[0] == 'C' || str[0] == 'V') && str[1] == 'N' && str[2] == 'B' && str[3] == 'R' && str[4] == ':' && str[9] == ':')
{
uint8_t i;
for(i = 10; i < 22; i++)
{
if(str[i] > '9' || str[i] < '0')
return 0;
}
return 1;
}
else
{
memset(fifo_get_data,0,22);
return 0;
}
}
//-------------------------------------------------------------------------------------------------------------------
// 函数简介 UART_INDEX 的接收中断处理函数 这个函数将在 UART_INDEX 对应的中断调用
// 参数说明 void
// 返回参数 void
// 使用示例 uart_rx_interrupt_handler();
//-------------------------------------------------------------------------------------------------------------------
void uart_rx_interrupt_handler (void)
{
// get_data = uart_read_byte(UART_INDEX); // 接收数据 while 等待式 不建议在中断使用
uart_query_byte(UART_INDEX, &get_data); // 接收数据 查询式 有数据会返回 TRUE 没有数据会返回 FALSE
fifo_write_buffer(&uart_data_fifo, &get_data, 1); // 将数据写入 fifo 中
fifo_data_count = fifo_used(&uart_data_fifo); // 查询数组当前数据个数
if(fifo_data_count == 22) //读到指定数目后开始解析
{
fifo_read_buffer(&uart_data_fifo, fifo_get_data, &fifo_data_count, FIFO_READ_AND_CLEAN); // 将 fifo 中数据读出并清空 fifo 挂载的缓冲
//一些格式判断语句防止有数据丢失导致格式错误
if(checkCmd(fifo_get_data))
{
gpio_toggle_level(LED1);
//usart_analysis(); 串口解析函数需要自己编写
memset(fifo_get_data,0,fifo_data_count);
}
}
}
IFX_INTERRUPT(uart0_rx_isr, 0, UART0_RX_INT_PRIO)
{
interrupt_global_enable(0); // 开启中断嵌套
IfxAsclin_Asc_isrReceive(&uart0_handle);
uart_rx_interrupt_handler(); // 串口接收处理
}PWM的产生——以呼吸灯为例
常用API函数有
- PWM初始化void pwm_init (pwm_channel_enum pwmch, uint32 freq, uint32 duty)
- 设置占空比void pwm_set_duty (pwm_channel_enum pwmch, uint32 duty)
在初始化函数中已经由IfxGtm_Atom_Pwm_start(&g_atomDriver, TRUE);打开了PWM不需要手动开启
可产生PWM的引脚不是任意的只能选用逐飞定义的枚举变量
最大占空比PWM_DUTY_MAX默认为10000可在头文件中自行修改
for(duty = 0; duty <= PWM_DUTY_MAX / 2; duty ++) // 输出占空比递增到 50%
{
// 呼吸流水灯
for(channel_index = 0; channel_index < CHANNEL_NUMBER; channel_index++)
{
duty_temp = (duty + channel_index * PWM_DUTY_MAX / 8) % (PWM_DUTY_MAX / 2) + (PWM_DUTY_MAX / 2);
pwm_set_duty(channel_list[channel_index], duty_temp); // 更新对应通道占空比
}
system_delay_us(200);
}每隔一段时间改变一次PWM的占空比就可以形成呼吸灯的效果
笔者水平有限本文仅作总结与分享欢迎批评指正手动笔芯~