

多移动机器人(阿克曼小车)在gazebo中的配置
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
多移动机器人阿克曼小车在gazebo中的配置
前言
最近需要进行异构多机器人方面的工作在之前的工作中已经实现了多麦克纳姆轮小车在gazebo中的仿真。
如何在Gazebo中实现多机器人仿真 https://www.guyuehome.com/4889
本文主要介绍了多阿克曼结构小车在gazebo的配置过程。项目参考了古月居的阿克曼小车项目以阿克曼小车的模型为基础针对多机器人的仿真目的进行修改。
原项目github地址https://github.com/guyuehome/guyueclass/tree/main/simulation%26control/ackerman_simulation
这个项目在古月学院也有课程因为作者主要是参考模型所以没有参考课程直接基于github源码修改感兴趣的同学可以去看看课程。
如何在Gazebo中实现阿克曼转向车的仿真 • 王泽恩https://class.guyuehome.com/detail/p_60541530e4b05a6195c158f0/6
配置过程
1. launch文件修改
原有的仿真只考虑单机器人需要对其launch文件做如下修改:
- 加入group及ns属性
- 去掉原有的全局
/racecar的namepsace - 使用
<tf_prefix>重新定义tf关系
原launch文件
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find racecar_description)/urdf/racecar.urdf.xacro'"/>
<!--运行joint_state_publisher节点发布机器人关节状态-->
<!--<node name = "robot_state_publisher" pkg = "robot_state_publisher" type = "state_publisher">-->
<node name= "robot_state_publisher" pkg= "robot_state_publisher" type= "robot_state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
<remap from="/joint_states" to="/racecar/joint_states"/>
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model racecar -param robot_description -x $(arg x_pos) -y $(arg y_pos) -z $(arg z_pos)"/>
<!-- 从yaml文件加载联合控制器的参数 -->
<rosparam file="$(find bringup)/config/ctrl.yaml" command="load"/>
<!-- 加载控制器 spawner -->
<node name="controller_manager" pkg="controller_manager" type="spawner"
respawn="false" output="screen" ns="/racecar"
args="left_rear_wheel_velocity_controller right_rear_wheel_velocity_controller
left_front_wheel_velocity_controller right_front_wheel_velocity_controller
left_steering_hinge_position_controller right_steering_hinge_position_controller
joint_state_controller"/>
<node pkg="racecar_description" type="servo_commands.py" name="servo_commands" output="screen">
</node>
修改后的launch文件
<!--机器人robot_0-->
<group ns="robot_0">
<!-- 加载机器人模型描述参数 bodyframe作用是向xacro文件中传参-->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find racecar_description)/urdf/racecar.urdf.xacro' bodyframe:=robot_0 ns:=robot_0"/>
<!-- 运行joint_state_publisher节点发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点发布tf -->
<!--<node name = "robot_state_publisher" pkg = "robot_state_publisher" type = "state_publisher">-->
<node name= "robot_state_publisher" pkg= "robot_state_publisher" type= "robot_state_publisher">
<param name="publish_frequency" type="double" value="20.0" />
<param name="tf_prefix" value="robot_0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model robot_0 -param robot_description -x $(arg x_pos0) -y $(arg y_pos0) -z $(arg z_pos0)"/>
<!-- 从yaml文件加载联合控制器的参数 -->
<rosparam file="$(find bringup)/config/ctrl.yaml" command="load"/>
<!-- 加载控制器 spawner -->
<node name="controller_manager" pkg="controller_manager" type="spawner"
respawn="false" output="screen"
args="left_rear_wheel_velocity_controller right_rear_wheel_velocity_controller
left_front_wheel_velocity_controller right_front_wheel_velocity_controller
left_steering_hinge_position_controller right_steering_hinge_position_controller
joint_state_controller"/>
<!-- 舵机控制转换节点 -->
<node pkg="racecar_description" type="servo_commands.py" name="servo_commands" output="screen"></node>
</group>
2. urdf文件中的修改
1 在原有的racecar.urdf.xacro文件中在line468 对gazebo_ros_control的插件进行了namespace定义需要进行删去否则在launch文件中我们加入的group的ns属性无法加上去gazebo会出现卡死的情况也是一开始让我非常疑惑的一点。
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<legacyModeNS>true</legacyModeNS>
<robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType>
<!--robotNamespace>/racecar</robotNamespace-->
</plugin>
</gazebo>
2 lidar.xacro, imu.xacro, camera.xacro中的topicname都需要去掉全局“/”否则无法加上命名空间。
3. yaml文件中的修改
在launch文件中我们需要从yaml文件加载联合控制器的参数在原有的yaml文件中文件的第一行写了racecar这样就导致yaml文件中的所有的参数都会加上racecar/的命名空间前缀导致出错。我们需要将第一行的racecar删去。
#racecar:
# Publish all joint states --公布所有--------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
....
4.servo_commands.py 和keyboard_teleop.py中的修改
这两个文件中的修改都一样就是将所有的/racecar命名空间去掉同时将所有全局消息改成局部消息去掉前面的全局“/”。
例如
/ackermann_cmd_mux/output ---> ackermann_cmd_mux/output
/left_rear_wheel_velocity_controller/command ---> left_rear_wheel_velocity_controller/command
servo_commands.py
pub_vel_left_rear_wheel = rospy.Publisher('left_rear_wheel_velocity_controller/command', Float64, queue_size=1)
pub_vel_right_rear_wheel = rospy.Publisher('right_rear_wheel_velocity_controller/command', Float64, queue_size=1)
pub_vel_left_front_wheel = rospy.Publisher('left_front_wheel_velocity_controller/command', Float64, queue_size=1)
pub_vel_right_front_wheel = rospy.Publisher('right_front_wheel_velocity_controller/command', Float64, queue_size=1)
pub_pos_left_steering_hinge = rospy.Publisher('left_steering_hinge_position_controller/command', Float64, queue_size=1)
pub_pos_right_steering_hinge = rospy.Publisher('right_steering_hinge_position_controller/command', Float64, queue_size=1)
...
rospy.Subscriber("ackermann_cmd_mux/output", AckermannDriveStamped, set_throttle_steer)
keyboard_teleop.py
pub = rospy.Publisher("ackermann_cmd_mux/output", AckermannDriveStamped,queue_size=1)
可以通过加命名空间对任一机器人进行键盘控制
ROS_NAMESPACE=robot_0 rosrun racecar_description keyboard_teleop.py
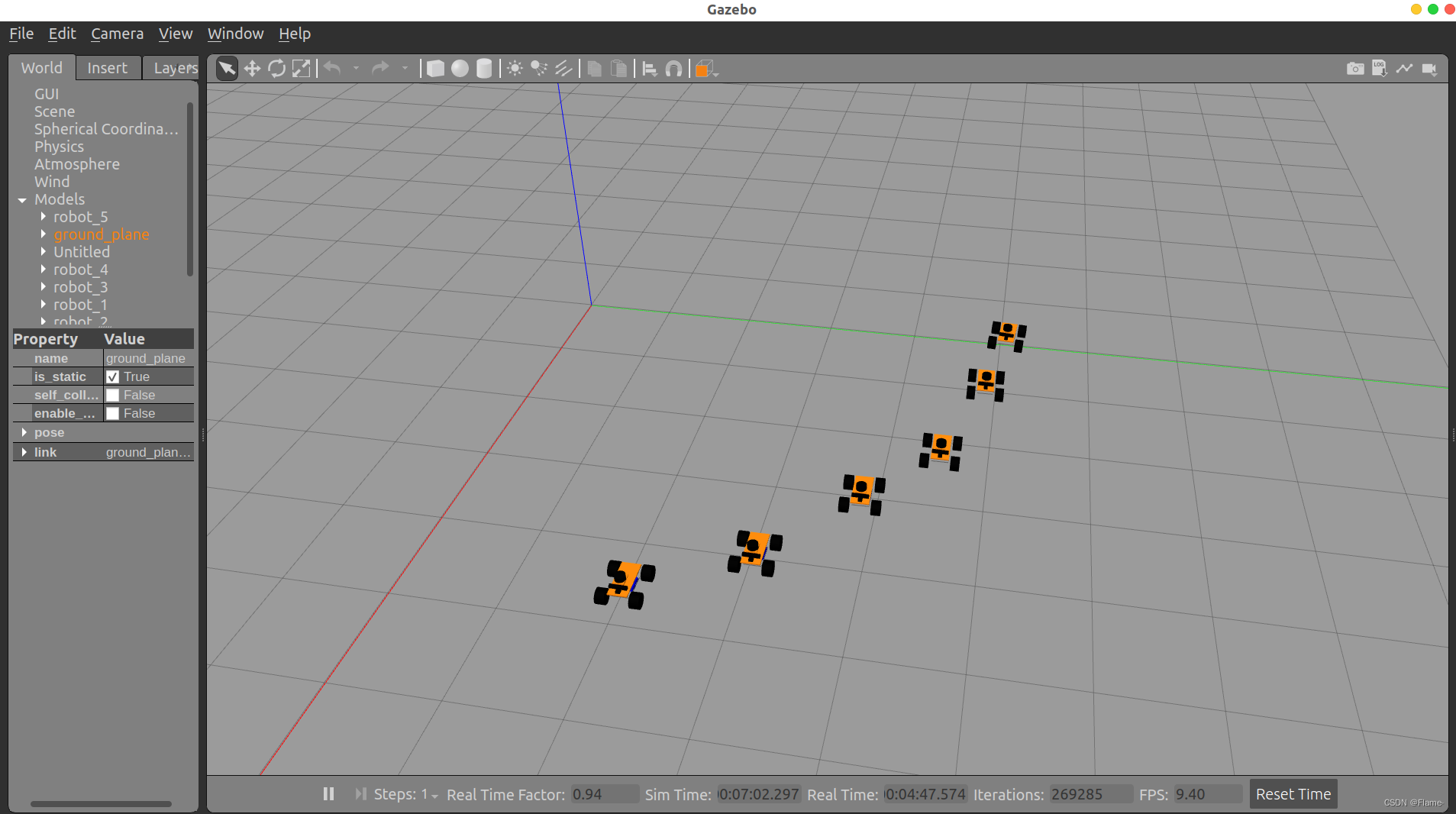
效果
总结
其实单机器人到多机器人的配置过程都大同小异其关键在于运用将ns属性加给每一个机器人使不同的机器人加载同一个urdf模型文件同时可以用不同的namespace对其进行区分。
这一次配置的重点就是在顶层加入namespace后发现会有各种各样的bug那么问题很清晰肯定是下一层的配置文件中存在着不同的命名空间导致上层命名失败。根据这个思路一步步排查即可。
原项目作者的模型建的很好只是可能没考虑到多机器人的运用在他的基础上进行开发也减少了很多重复造轮子的工作。之后作者也会一直更新基于多异构机器人平台的项目开发过程。
“山路若抖缓步迈斗酒洒羁绊”
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |