[激光原理与应用-62]:激光器 - 光学 - 怎样测量光斑和光束质量?
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
目录
一、概述
激光的直径和光强度分布可通过光束轮廓分析仪测量但为了判定光束质量还需要加上M²测量扩展套件两者组合能沿传播方向扫描光束并采集多个光斑直径而算出M²数值。
光斑是光束在平面上的投影。
二、光强分布
激光谐振腔中的光强分布通过横模表征而理想的激光器发射TEM00基模高斯光束它具有最低阈值、最小束腰和最小发散角并且输出光束的横向强度轮廓没有分瓣。
高阶模的效率更低而且束腰和发散角更大尤其容易出现在高功率激光中。实际光束是混模的包含TEM00模和高阶模。

其它重要的光束形状可从高斯光束变换。
三、光束直径
表达光束直径的常用定义有三种

第一种是半高宽(FWHM)它以最高光强点为中心在强度降低50%的两个点之间测量光束直径。对于高斯光束在此计算宽度范围内包含约76%的功率。
第二种是1/e²光束直径一般采用机械式光束分析仪测量高斯光束。对于高斯光束FWHM光束直径的1.7倍等于1/e²光束直径。
第三种是D4σ直径是ISO11146标准中推荐用于任意光束的包括高阶模光束。这种方法测量整个光束的轮廓特征需要注意补偿背景光。
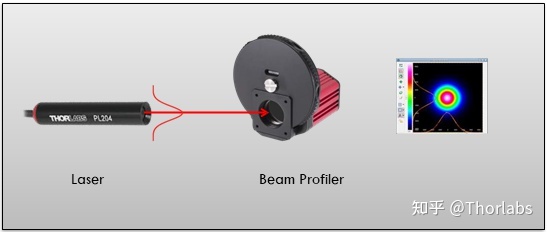
四、光束相机
光束相机能测量任意光束轮廓不过由于高灵敏传感芯片可能需要衰减才能防止饱和甚至损坏仪器而且测量时要做背景光补偿。为了计算强度轮廓每个像素的电流根据三维坐标系统处理光束直径根据ISO11146推荐的D4σ方法计算。
相机式光束分析仪的优点是没有运动部件而且能测量任何光束轮廓包括高阶横模甚至能同时测量多束激光。不过它们一般基于硅探测器工作波长只有UV到NIR范围而且需要处理数据量更大。
Thorlabs新一代相机式光束分析仪(BP207系列)采用被动制冷的500万像素黑白CMOS芯片;具有双倍成像面积的1200万像素版本也在研发中。它安装了六位置滤光片转轮提供最高60 dB衰减。

五、M²因子测量
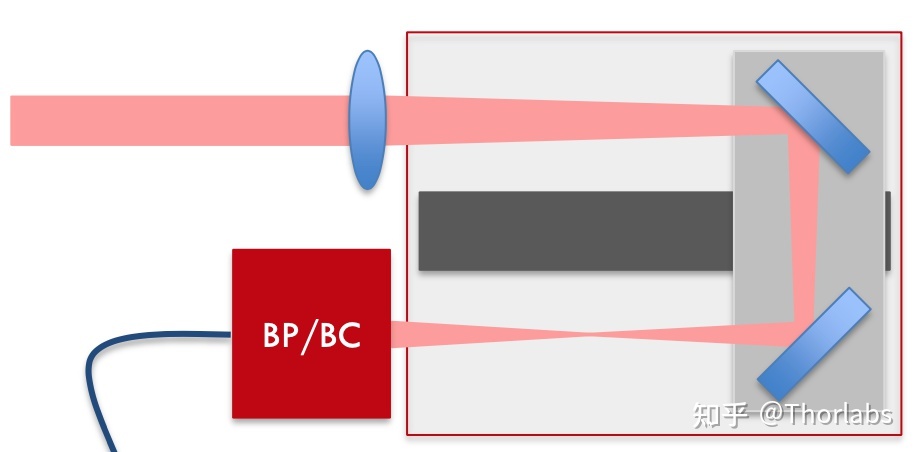
为了测量准直光束的M²因子需要使光束聚焦并在焦点前后扫描。直接的方法是把光束分析仪装在位移台上沿光路运动采集多个点上的X和Y直径由此确定束腰并根据实际与理想光束的参量积之比算出M²因子。
这种装置既占空间还要让光束分析仪运动特别是对于狭缝式分析仪这还可能引入额外的测量噪声。因此Thorlabs M²测量系统设计使用折叠光路光束分析仪固定在设备的输出端口聚焦透镜位于输入端口使用两个转向镜使光束通过闭光的外壳。两个反射镜都装在精密位移台上可以移动光束的聚焦位置逐点测量光束直径。
六、束腰以及大小

光束半径最小的位置。
激光光束的束腰指的是光束传播方向上光束半径最小的地方。
这个地方的光束半径成为束腰半径。
七、发散角
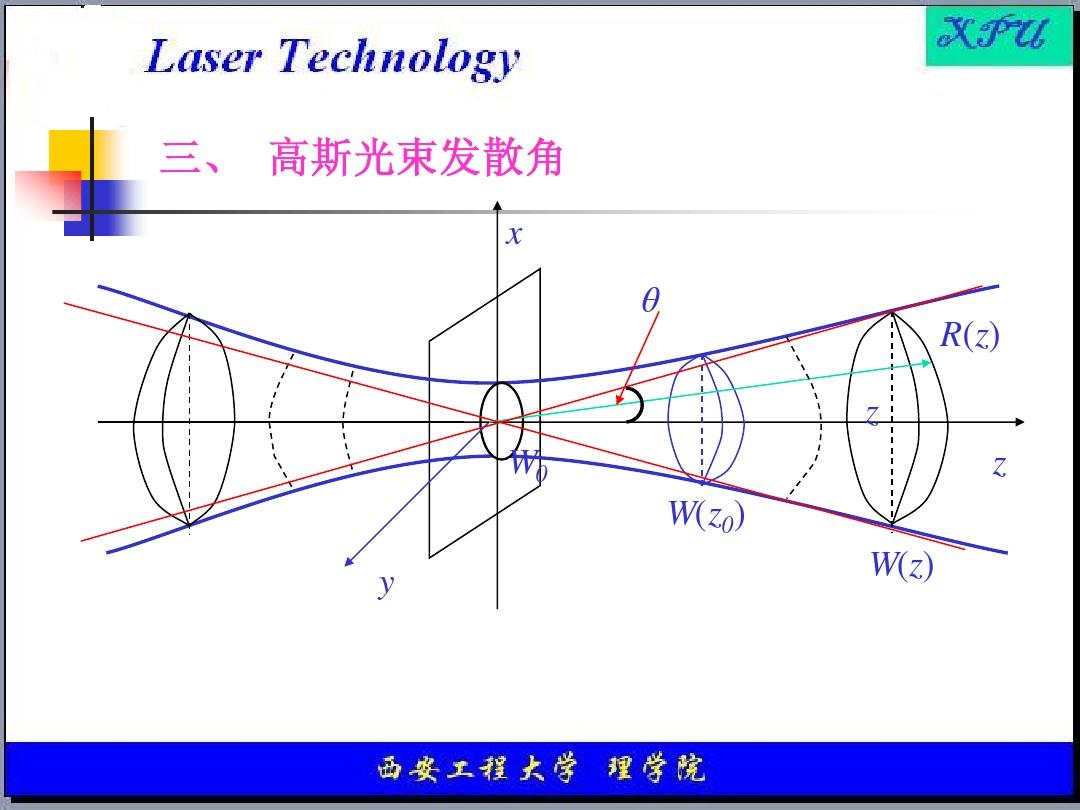
在自由空间光通信的应用中需要非常小的光束发散角。
具有非常小发散角的光束例如光束半径在很长的传输距离内接近常数被称为准直光束(近似直线。
由于波动性光束中存在一些发散是不可避免的(假设光在各向同性介质中传输。紧聚焦光束的发散角更大。如果一个光束发散角远大于物理上决定的发散角那么光束就具有很差的光束质量。
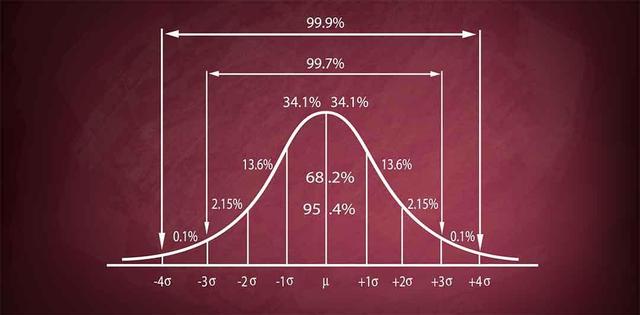
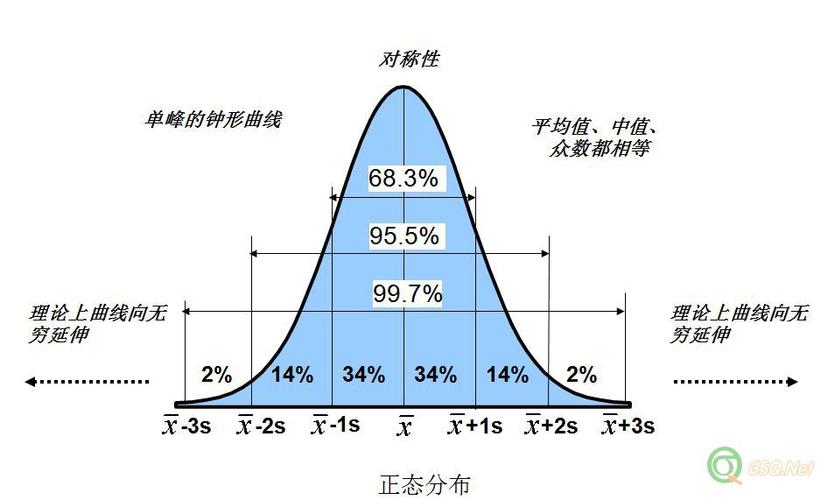
八、正态分布/高斯分布