

【三年面试五年模拟】算法工程师的独孤九剑秘籍(第十二式)
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |

Rocky Ding
公众号WeThinkIn
写在前面
【三年面试五年模拟】栏目专注于分享AI行业中实习/校招/社招维度的必备面积知识点与面试方法并向着更实战更真实更从容的方向不断优化迭代。也欢迎大家提出宝贵的意见或优化ideas一起交流学习💪
大家好我是Rocky。
本文是“三年面试五年模拟”之独孤九剑秘籍的第十二式之前我们将独孤九剑秘籍前六式进行汇总梳理成汇总篇并制作成pdf版本大家可在公众号后台 【精华干货】菜单或者回复关键词“三年面试五年模拟” 进行取用。
除此之外Rocky还将YOLOv1-v7全系列大解析也制作成相应的pdf版本大家可在公众号后台 【精华干货】菜单或者回复关键词“YOLO” 进行取用。
由于【三年面试五年模拟】系列都是Rocky在工作之余进行整理总结难免有疏漏与错误之处欢迎大家对可优化的部分进行指正我将在后续的优化迭代版本中及时更正。
在【人人都是算法工程师】算法工程师的“三年面试五年模拟”之独孤九剑秘籍先行版中我们阐述了这个program的愿景与规划。本系列接下来的每一篇文章都将以独孤九剑秘籍框架的逻辑展开考虑到易读性与文章篇幅一篇文章中只选取每个分支技能树中的2-3个经典&高价值知识点和面试问题并配以相应的参考答案精简版供大家参考。
希望独孤九剑秘籍的每一式都能让江湖中的英雄豪杰获益。

Soenjoy与本文的BGM一起食用更佳哦
干货篇
----【目录先行】----
深度学习基础
-
什么是转置卷积的棋盘效应
-
Instance Normalization的作用
经典模型&&热门模型
-
Focal Loss的作用
-
YOLO系列的面试问题
机器学习基础
-
机器学习有哪些种类
-
L1正则为什么比L2正则更容易产生稀疏解?
Python/C/C++知识
-
Python中assert的作用
-
Python中互换变量有不用创建临时变量的方法吗
-
C/C++中野指针的概念
模型部署
-
什么是异构计算
-
端侧部署时整个解决方案的核心指标
图像处理基础
-
有哪些常用的图像质量评价指标
-
什么是图像畸变
开放性问题
-
不同性质的公司如何使用好AI技术
-
新时期的AI Lab该如何搭建
----【深度学习基础】----
【一】什么是转置卷积的棋盘效应

造成棋盘效应的原因是转置卷积的不均匀重叠uneven overlap。这种重叠会造成图像中某个部位的颜色比其他部位更深。
在下图展示了棋盘效应的形成过程深色部分代表了不均匀重叠
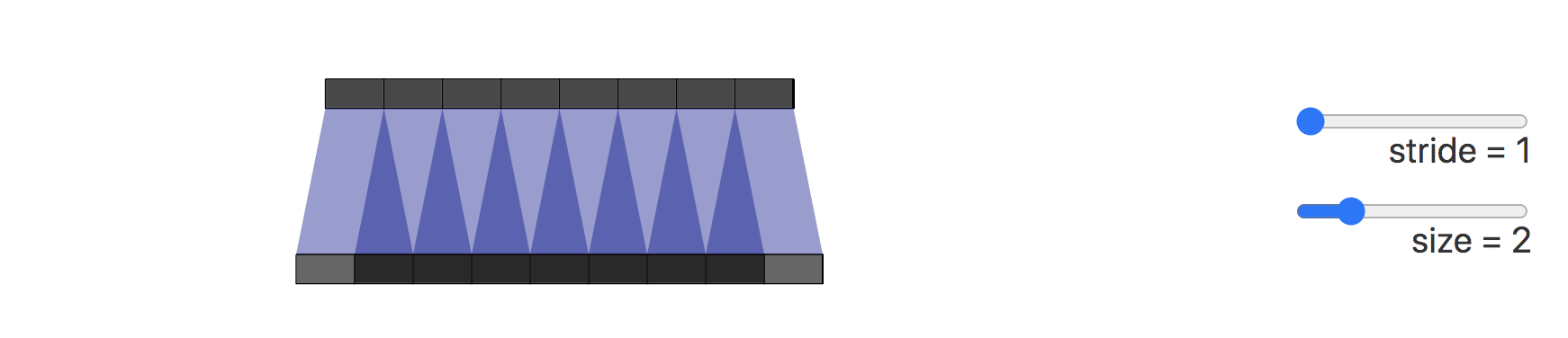
接下来我们将卷积步长改为2可以看到输出图像上的所有像素从输入图像中接收到同样多的信息它们都从输入图像中接收到一个像素的信息这样就不存在转置卷带来的重叠区域。

我们也可以直接进行插值Resize操作然后再进行卷积操作来消除棋盘效应。这种方式在超分辨率重建场景中比较常见。例如使用双线性插值和近邻插值等方法来进行上采样。
【二】Instance Normalization的作用
Instance NormalizationIN和Batch NormalizationBN一样也是Normalization的一种方法只是IN是作用于单张图片而BN作用于一个Batch。
BN对Batch中的每一张图片的同一个通道一起进行Normalization操作而IN是指单张图片的单个通道单独进行Normalization操作。如下图所示其中C代表通道数N代表图片数量Batch。
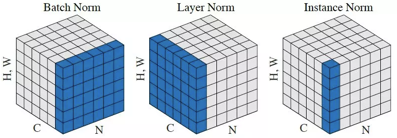
IN适用于生成模型中比如图片风格迁移。因为图片生成的结果主要依赖于某个图像实例所以对整个Batch进行Normalization操作并不适合图像风格化的任务在风格迁移中使用IN不仅可以加速模型收敛并且可以保持每个图像实例之间的独立性。
下面是IN的公式

其中t代表图片的indexi代表的是feature map的index。
----【经典模型&&热门模型】----
【一】Focal Loss的作用
Focal Loss是解决了分类问题中类别不均衡、分类难度差异的一个损失函数使得模型在训练过程中更加聚焦在困难样本上。
Focal Loss是从二分类问题出发同样的思想可以迁移到多分类问题上。
我们知道二分类问题的标准loss是交叉熵

对于二分类问题我们也几乎适用sigmoid激活函数
y
^
=
σ
(
x
)
\hat{y} = \sigma(x)
y^=σ(x)所以上面的式子可以转化成

这里有
1
−
σ
(
x
)
=
σ
(
−
x
)
1 - \sigma(x) = \sigma(-x)
1−σ(x)=σ(−x)。
Focal Loss论文中给出的式子如下
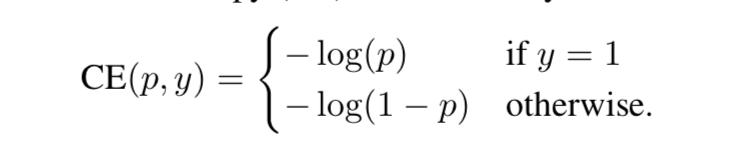
其中 y ∈ { 1 , − 1 } y\in \{ 1,-1\} y∈{1,−1}是真实标签 p ∈ [ 0 , 1 ] p\in[0,1] p∈[0,1]是预测概率。
我们再定义 p t : p_{t}: pt:

那么上面的交叉熵的式子可以转换成

有了上面的铺垫最初Focal Loss论文中接着引入了均衡交叉熵函数
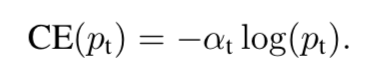
针对类别不均衡问题在Loss里加入一个控制权重对于属于少数类别的样本增大 α t \alpha_{t} αt即可。但这样有一个问题它仅仅解决了正负样本之间的平衡问题并没有区分易分/难分样本。
为什么上述公式只解决正负样本不均衡问题呢
因为增加了一个系数 α t \alpha_{t} αt跟 p t p_{t} pt的定义类似当 l a b e l = 1 label=1 label=1的时候 α t = α \alpha_{t}=\alpha αt=α ;当 l a b e l = − 1 label=-1 label=−1的时候 α t = 1 − α \alpha_{t}= 1 - \alpha αt=1−α α \alpha α的范围也是 [ 0 , 1 ] [0,1] [0,1]。因此可以通过设定 α \alpha α的值如果 1 1 1这个类别的样本数比 − 1 -1 −1这个类别的样本数少很多那么 α \alpha α可以取 0.5 0.5 0.5到 1 1 1来增加 1 1 1这个类的样本的权重来控制正负样本对整体Loss的贡献。
Focal Loss
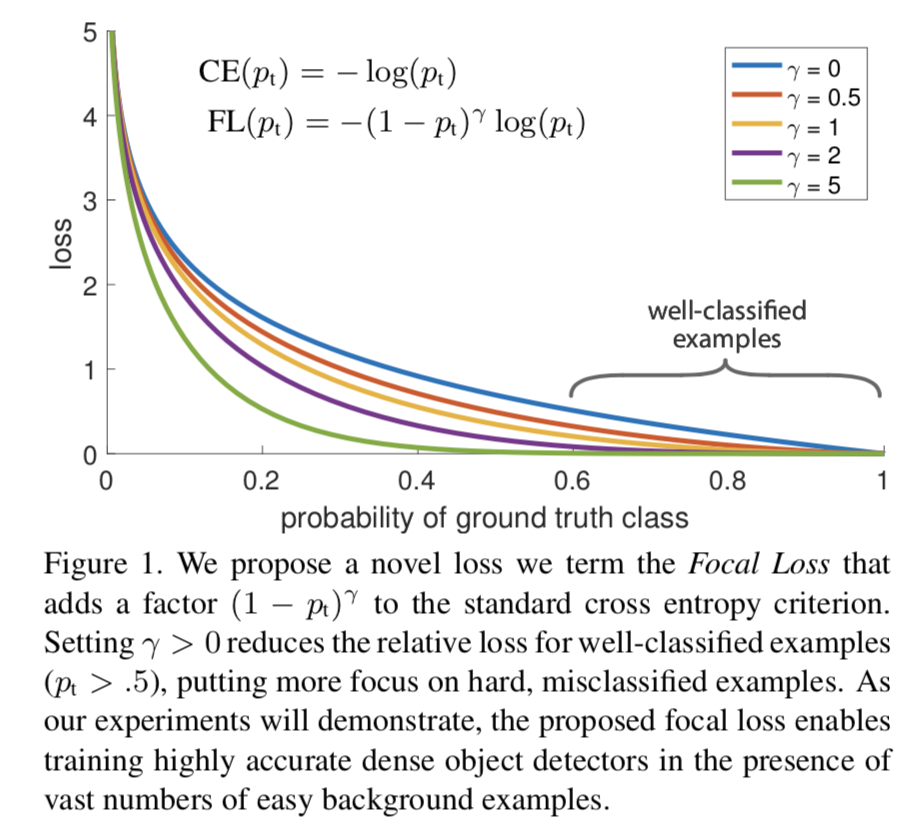
为了可以区分难/易样本Focal Loss雏形就出现了

( 1 − p t ) γ (1 - p_{t})^{\gamma} (1−pt)γ用于平衡难易样本的比例不均 γ > 0 \gamma >0 γ>0起到了对 ( 1 − p t ) (1 - p_{t}) (1−pt)的放大作用。 γ > 0 \gamma >0 γ>0减少易分样本的损失使模型更关注于困难易错分的样本。例如当 γ = 2 \gamma =2 γ=2时模型对于某正样本预测置信度 p t p_{t} pt为 0.9 0.9 0.9这时 ( 1 − 0.9 ) γ = 0.01 (1 - 0.9)^{\gamma} = 0.01 (1−0.9)γ=0.01也就是FL值变得很小而当模型对于某正样本预测置信度 p t p_{t} pt为0.3时 ( 1 − 0.3 ) γ = 0.49 (1 - 0.3)^{\gamma} = 0.49 (1−0.3)γ=0.49此时它对Loss的贡献就变大了。当 γ = 0 \gamma = 0 γ=0时变成交叉熵损失。
为了应对正负样本不均衡的问题在上面的式子中再加入平衡交叉熵的 α t \alpha_{t} αt因子用来平衡正负样本的比例不均最终得到Focal Loss
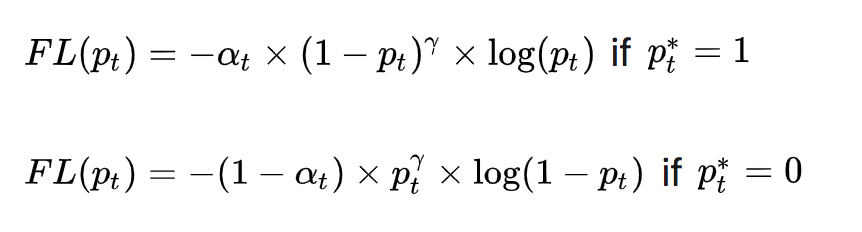
Focal Loss论文中给出的实验最佳取值为 a t = 0.25 a_{t}= 0.25 at=0.25 γ = 2 \gamma = 2 γ=2。
【二】YOLO系列的面试问题
Rocky之前总结了YOLOv1-v7全系列的解析文章帮助大家应对可能出现的与YOLO相关的面试问题大家可按需取用
【Make YOLO Great Again】YOLOv1-v7全系列大解析汇总篇
----【机器学习基础】----
【一】机器学习有哪些种类
机器学习中通常根据数据是否有标签可以分为监督学习(supervised learning)、非监督学习(unsupervised learning)半监督学习(semi-supervised learning)以及弱监督学习(weakly supervised learning)。
监督学习
机器学习模型在训练过程中的所有数据都有标签就是监督学习的逻辑。
监督学习是最常见的学习种类常见场景为分类和回归问题。
深度学习模型大都数都遵从监督学习的流程并且支持向量机(Support Vector Machine, SVM)朴素贝叶斯(Naive Bayes)逻辑回归(Logistic Regression)K近邻(K-Nearest Neighborhood, KNN)决策树(Decision Tree)随机森林(Random Forest)AdaBoost以及线性判别分析(Linear Discriminant Analysis, LDA)等也属于监督学习算法的范畴。
非监督学习
非监督学习与监督学习完全相反机器学习模型在训练过程中的所有数据都是没有标签的主要学习数据本身的一些特性。
比如想象一个人从来没有见过猫和狗如果给他看了大量的猫和狗虽然他还是没有猫和狗的概念但是他是能够观察出每个物种的共性和两个物种间的区别的并对这个两种动物予以区分。
半监督学习
半监督学习的逻辑是机器学习模型在训练过程中部分数据有标签与此同时另外一部分数据没有标签并把这两种数据都利用起来用于训练。
弱监督学习
弱监督学习的逻辑是机器学习模型在训练过程中使用的数据的标签存在不可靠的情况。这里的不可靠可以是标注不正确多重标记标记不充分局部标记包含噪声等情况。一个直观的例子是相对于分割的标签来说分类的标签就是弱标签。
【二】L1正则为什么比L2正则更容易产生稀疏解?
我们首先可以设目标函数为 L L L目标函数中的权值参数为 w w w那么目标函数和权值参数的关系如下所示

如上图所示最优的 w w w在绿色的点处而且 w w w非零。
我们首先可以使用L2正则进行优化新的目标函数 L + C W 2 L + CW^{2} L+CW2示意图如下蓝线所示
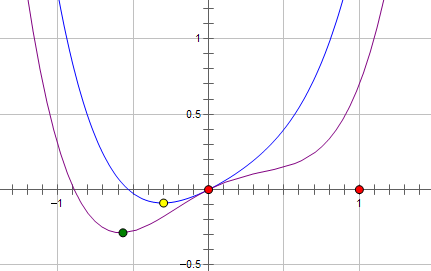
我们可以看到最优的 w w w出现在黄点处 w w w的绝对值减小了更靠近横坐标轴但是依然是非零的。
为什么是非零的呢
我们可以对L2正则下的目标函数求导

我们发现权重 w w w每次乘上的是小于1的倍数进行收敛而且其导数在 w = 0 w=0 w=0时没有办法做到左右两边导数异号所以L2正则使得整个训练过程稳定平滑但是没有产生稀疏性。
接下来我们使用L1正则新的目标函数 L + C ∣ w ∣ L + C|w| L+C∣w∣示意图如下粉线所示
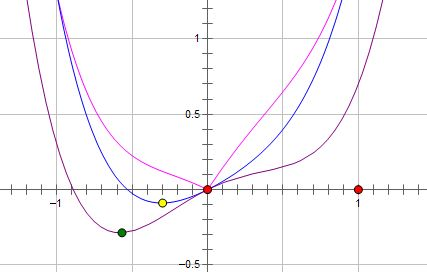
这里最优的 w w w就变成了0。因为保证使用L1正则后 x = 0 x=0 x=0处左右两个导数异号就能满足极小值点形成的条件。
我们来看看这次目标函数求导的式子

可以看出L1正则的惩罚很大 w w w每次都是减去一个常数的线性收敛所以L1比L2更容易收敛到比较小的值而如果 C > ∣ f ′ ( 0 ) ∣ C > |f^{'}(0)| C>∣f′(0)∣就能保证 w = 0 w = 0 w=0处取得极小值。
上面只是一个权值参数 w w w。在深层网路中L1会使得大量的 w w w最优值变成0从而使得整个模型有了稀疏性。
----【Python/C/C++知识】----
【一】Python中assert的作用
Python中assert断言用于判断一个表达式在表达式条件为 f a l s e false false的时候触发异常。
断言可以在条件不满足程序运行的情况下直接返回错误而不必等待程序运行后出现崩溃的情况。
Rocky直接举一些例子
>>> assert True
>>> assert False
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
AssertionError
>>> assert 1 == 1
>>> assert 1 == 2
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
AssertionError
>>> assert 1 != 2
【二】Python中互换变量有不用创建临时变量的方法吗
在Python中当我们想要互换两个变量的值或将列表中的两个值交换时我们可以使用如下的格式进行不需要创建临时变量
x, y = y, x
这么做的原理是什么呢
首先一般情况下Python是从左到右解析一个语句的但在赋值操作的时候因为是右值具有更高的计算优先级所以需要从右向左解析。
对于上面的代码它的执行顺序如下
先计算右值 y , x y , x y,x(这里是简单的原值但可能会有表达式或者函数调用的计算过程) 在内存中创建元组(tuple)存储 y , x y, x y,x分别对应的值计算左边的标识符元组被分别分配给左值通过解包(unpacking)元组中第一个标示符对应的值 ( y ) (y) (y)分配给左边第一个标示符 ( x ) (x) (x)元组中第二个标示符对应的值 ( x ) (x) (x)分配给左边第二个标示符 ( y ) (y) (y)完成了 x x x和 y y y的值交换。
【三】C/C++中野指针的概念
野指针也叫空悬指针不是指向null的指针是未初始化或者未清零的指针。
产生原因
-
指针变量未及时初始化。
-
指针free或delete之后没有及时置空。
解决办法
-
定义指针变量及时初始化活着置空。
-
释放操作后立即置空。
----【模型部署】----
【一】什么是异构计算
首先异构现象是指不同计算平台之间由于硬件结构(包括计算核心和内存)指令集和底层软件实现等方面的不同而有着不同的特性。
异构计算是指联合使用两个或者多个不同的计算平台并进行协同运算。比如CPU和GPU的异构计算TPU和GPU的异构计算以及TPU/GPU/CPU的异构计算等等。
【二】端侧部署时整个解决方案的核心指标
- 精度
- 耗时
- 内存占用
- 功耗
----【图像处理基础】----
【一】有哪些常用的图像质量评价指标
- 峰值信噪比Peak-Signal to Noise Ratio,PSNR
- 均方误差Mean Square Error,MSE
- MAEMean Absolute Error,MSE
- 信噪比SNRSignal to Noise Ratio,SNR
- 信息保真度准则Information Fidelity Criterion,IFC
- 视觉信息保真度Visual Information Fidelity,VIF
- 结构相似度Structure Similaruty,SSIM
【二】什么是图像畸变
使用摄像头时可能会出现图像边缘线条弯曲的情况尤其是边缘部分是直线时这种现象更为明显。比如摄像头显示画面中的门框、电线杆、墙面棱角、吊顶线等出现在边缘时可能会有比较明显的弯曲现象这种现象就叫做畸变。
畸变是指光学系统对物体所成的像相对于物体本身而言的失真程度是光学透镜的固有特性其直接原因是因为镜头的边缘部分和中心部分的放大倍率不一样导致。畸变并不影响像的清晰程度只改变物体的成像形状畸变是一种普遍存在的光学现象。

----【开放性问题】----
这些问题基于Rocky的思考提出希望除了能给大家带来面试的思考也能给大家带来面试以外的思考。这些问题没有标准答案我相信每个人心中都有自己灵光一现的创造你的呢
【一】不同性质的公司如何使用好AI技术
这是一个非常有价值的问题随着AI技术进入全面的落地阶段如何将AI技术与公司定位相适配利用好AI技术并产生更多现金流闭环成为未来各个公司重点考虑的问题。
【二】新时期的AI Lab该如何搭建
深度学习发展至今工业界学术界投资界都对其优势和局限有所判断了基于此各个公司的AI Lab也进入了全新的阶段如何调整架构如何改变定位如何转变认知是一件需要思考的事情。
精致的结尾
最后感谢大家读完这篇文章希望能给大家带来帮助~后续Rocky会持续撰写“三年面试五年模拟”之独孤九剑的系列文章大家敬请期待
Rocky一直在运营技术交流群WeThinkIn-技术交流群这个群的初心主要聚焦于技术话题的讨论与学习包括但不限于算法开发竞赛科研以及工作求职等。群里有很多人工智能行业的大牛欢迎大家入群一起学习交流~请添加小助手微信Jarvis8866拉你进群~