

PID控制和误差曲线分析
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
PID控制模型
负反馈控制模型到处都挺常见的我记得高中的时候生物上就有一堆什么体液调节之类的。PID控制也算是经典控制了大家讲的都是经验之谈这里我从误差曲线调节的角度来讲误差曲线调节一般都是神经网络上谈的。
PID模型
常分为位置式PID和增量式PID
位置式 o u t = K p ∗ e k + K i ∗ ∑ e k + K d ∗ [ e k − e k − 1 ] out = K_p*e_k+K_i*∑e_k+K_d*[e_k-e_{k-1}] out=Kp∗ek+Ki∗∑ek+Kd∗[ek−ek−1]
简记 o u t = K p ∗ e k + K i ∗ ∑ e k + K d ∗ e k ′ out = K_p*e_k+K_i*∑e_k+K_d*e_k' out=Kp∗ek+Ki∗∑ek+Kd∗ek′
增量式 o u t + = K p ∗ [ e k − e k − 1 ] + K i ∗ e k + K d ∗ [ e k − 2 e k − 1 + e k − 2 ] out += K_p*[e_k-e_{k-1}] + K_i*e_k+K_d*[e_k-2e_{k-1}+e_{k-2}] out+=Kp∗[ek−ek−1]+Ki∗ek+Kd∗[ek−2ek−1+ek−2]
简记 o u t + = K p ∗ e k ′ + K i ∗ e k + K d ∗ e k ′ ′ out += K_p*e_k' + K_i*e_k+K_d*e_k'' out+=Kp∗ek′+Ki∗ek+Kd∗ek′′
待控制系统
我这里将待控制系统的模型分为两类孤立系统和耗散系统
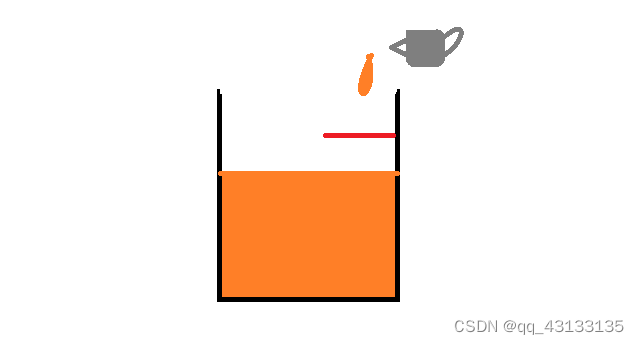
下图中为一个桶红色的是目标高度假设橙色液体是水
1、孤立系统
这种系统的特性就是你加一滴水他就有一滴水留存
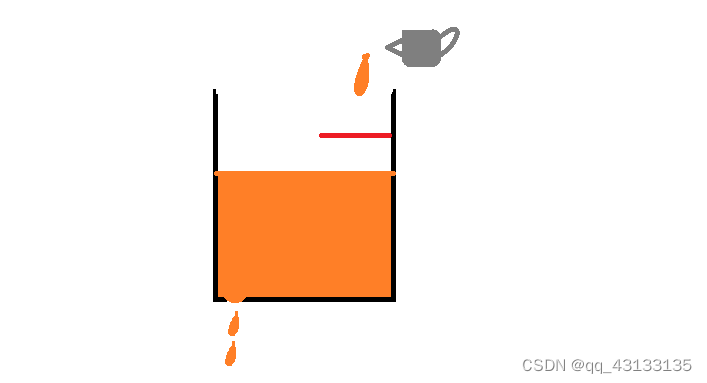
2、耗散系统
这种系统的特性就是你加一滴水这滴水会自己从底部漏完然后消失
模型输出使得误差曲线降为0
控制理论中我们常用的说法是这样将桶的水位控制到目标高度红线。
负反馈调节
如上图中水位低于目标高度负值时我们需要往桶里加水正值才能使得水位更接近于目标这便是负反馈调节我们的操作输出和系统实际状态是相反两者此消彼长维持系统平衡。
误差控制
我们若假设实际误差为
E
r
r
o
=
O
b
s
e
r
v
−
T
a
r
g
e
t
Err_o = Observ - Target
Erro=Observ−Target即实际误差 = 实际观测值 - 目标值 。
这样我们就不用关心正反馈还是负反馈了
负反馈 o u t = − E r r o out = -Err_o out=−Erro
正反馈 o u t = E r r o out = Err_o out=Erro需要注意的是这里的误差和pid算法中的误差刚好是相反的
至此控制算法模型摆脱实际问题成为独立的数学模型控制模型的输出是误差的函数
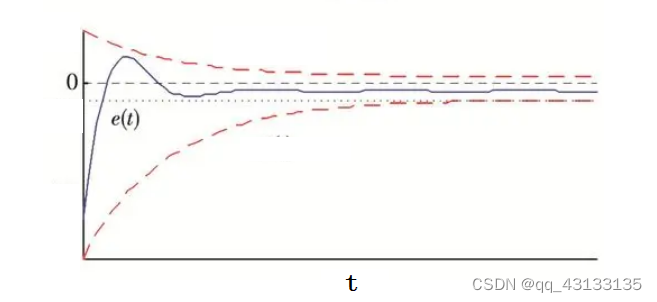
误差曲线
当我们人为操纵待控制系统时它的误差就会随着变化我们的目标就只有一个控制模型输出使得误差为0。
 对于之前所述的孤立系统而言我们只要假设单次加水量
W
a
d
d
W_{add}
Wadd:
对于之前所述的孤立系统而言我们只要假设单次加水量
W
a
d
d
W_{add}
Wadd:
W a d d = − E r r o W_{add} = - Err_o Wadd=−Erro
水没达到标高就多加点水水高于标高就倒出点水慢慢的水位就可以到达标高了。
当然还有一个细节问题就是单位量级问题比如说我加水用的是单位是 m 3 m^3 m3对于一个桶和一根管横截面积不同加相同水的影响就不同我们可以增加一个系数k通过调节系数使得实际影响相同
W a d d = − k ∗ E r r o W_{add} = - k*Err_o Wadd=−k∗Erro这样做必然是有好处的我们只需研究一个标准系统其余的系统我们可以通过调节k参数将其转化为标准系统的等效系统这样就能将之前研究成果应用在新的系统上了。

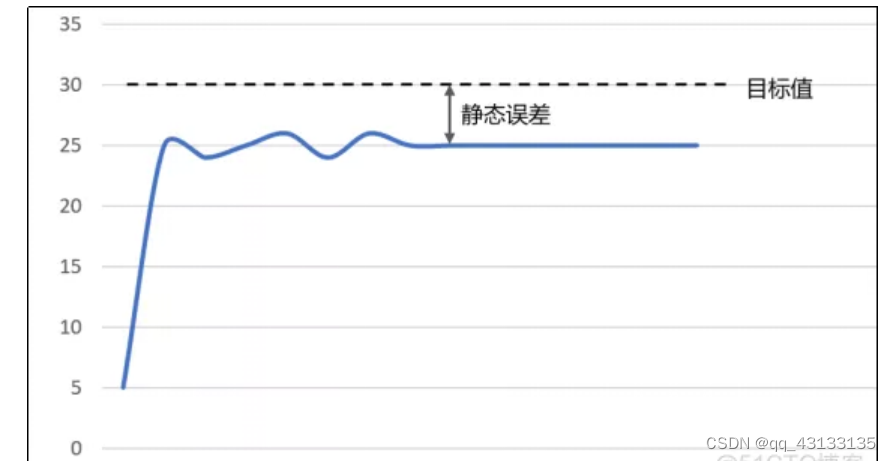
对于耗散系统而言我们若假设单次加水量 W a d d W_{add} Wadd和之前一样便会出现一个问题
由于一直在漏水达到平衡后将有漏水量=加水量由于漏水量不为0所以必然有一个恒定误差使得 W a d d W_{add} Wadd不为0也就是我们常说的净差
我们需要做的就是在输出中加上一个输出常数 C C C其值与漏水量相等通过弥补常数抵消漏水影响就可以使该系统转化为之前的孤立系统剩下的和之前一样了
W a d d = − ( k ∗ E r r o + C ) W_{add} = - (k*Err_o + C) Wadd=−(k∗Erro+C)
这个常数 C C C我们是可以通过累计静态误差得到的直到静态误差为0累计值便不再增加
C = k 2 ∗ ∑ e ( t ) C =k_2*∑e(t) C=k2∗∑e(t)
k 2 k_2 k2参数可以根据系统响应进行调整若是系统响应的较慢则参数应取较小值若取太大了使得 C C C常数>漏水量输出就会产生一定的震荡区间使得 C C C常数有时>漏水量有时<漏水量。
当然通常会对 C 项 C项 C项进行积分限幅比如漏水量最多不超过50结果由于你的参数取太大了导致算得C参数都为1000了这样还会影响后续系统调整导致调整滞后引发系统进行发散式震荡。
输入与输出的区间映射
对于控制系统而言一般采用离散输出这里便存在一个分辨率的问题
加上输出范围是[-1,0,1]三个值而输入范围是[-2,-1,0,1,2]系统必然是要震荡的
假设输出恒为1时输入为2输出为-1时输入为-2。那么我若想让输入为-1则输出必然是在0和1之间震荡的按照一定概率比例的0和1组合才能实现。之前在静态误差累计部分说到 k 2 k_2 k2参数若取的偏大就会造成系统震荡便是这个原因 k 2 k_2 k2参数太大会使得输出分辨率降低。

对于一个要稳定控制的系统其分辨率至少要保证控制系统输出分辨率 ≥ 控制系统输入分辨率