

计算机视觉基础——基于yolov5-face算法的车牌检测-CSDN博客
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
文章目录
车牌检测算法检测实现
1.环境布置
- torch==1.8.1
- torchvision==0.9.1
pip install -r requirements.txt
2.数据处理
2.1 CCPD数据集介绍
2.1.1 ccpd2019及2020
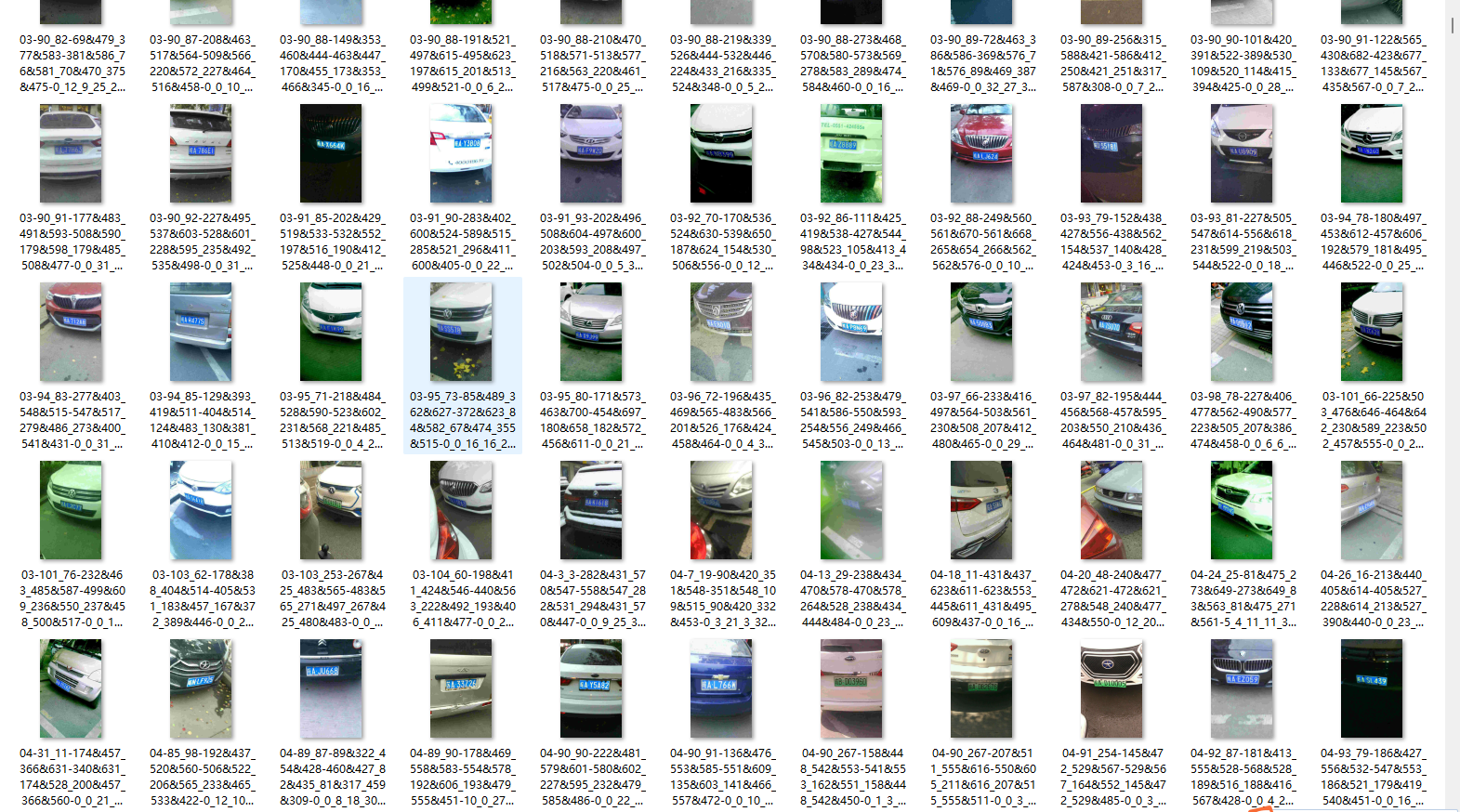
CCPD数据集主要采集于安徽某停车场一段时间内的数据
所有图片尺寸固定为720×1160w×h
大约包含25w+的各种场景图片如下图所示
| 类别 | 描述 | 图片数 |
|---|---|---|
| CCPD-Base | 通用车牌图片 | 200k |
| CCPD-FN | 车牌离摄像头拍摄位置相对较近或较远 | 20k |
| CCPD-DB | 车牌区域亮度较亮、较暗或者不均匀 | 20k |
| CCPD-Rotate | 车牌水平倾斜 20 到 50 度竖直倾斜-10到 10 度 | 10k |
| CCPD-Tilt | 车牌水平倾斜 15 到 45 度竖直倾斜 15 到 45 度 | 10k |
| CCPD-Weather | 车牌在雨雪雾天气拍摄得到 | 10k |
| CCPD-Challenge | 在车牌检测识别任务中较有挑战性的图片 | 10k |
| CCPD-Blur | 由于摄像机镜头抖动导致的模楜车牌图片 | 5k |
| CCPD-NP | 没有安装车牌的新车图片 | 5k |
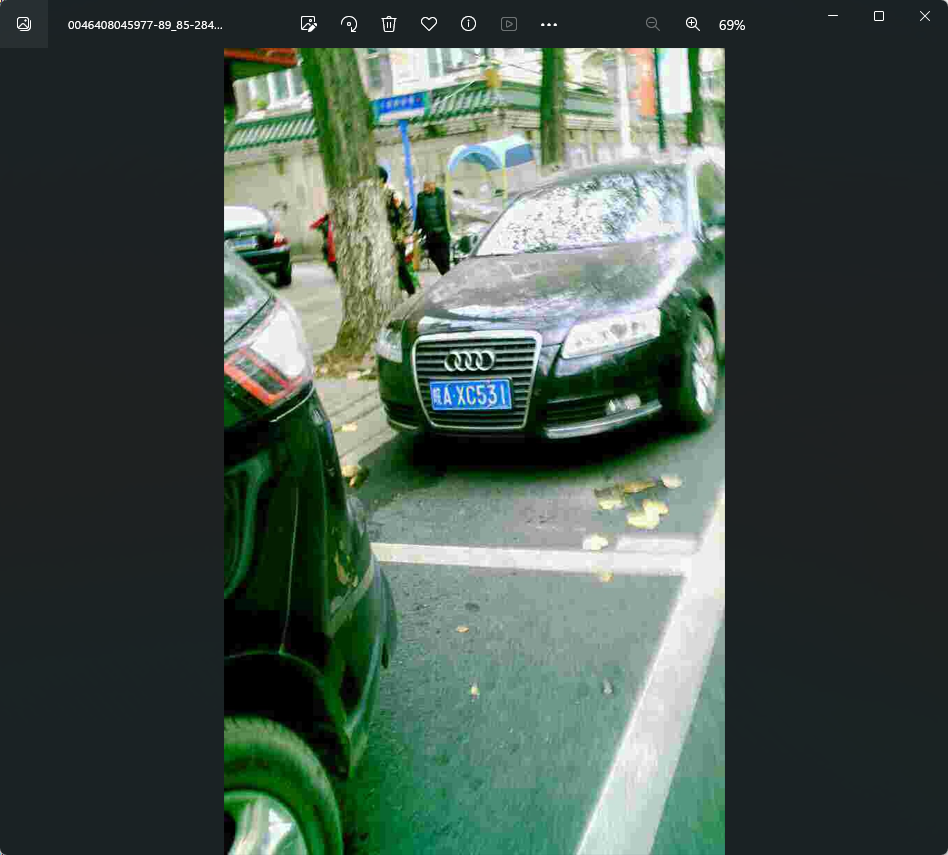
2.1.2 文件名字解析
1、01:车牌占整个界面比例一般没用可忽略
2、86_91: 车牌的水平角度和垂直角度
3、298\&341_449\&414: 车牌标注框左上角和右下角的坐标
4、458\&394_308\&410_304\&357_454\&341车牌四个顶点的坐标顺序为右下、左下、左上、右上
5、0_0_14_28_24_26_29: 这个代表着和省份 (第一位)、地市 (第二位)、车牌号 (剩余部分) 的映射关系
6、124: 亮度值越大亮度越高仅供参考
7、24模糊度值越小越模糊仅供参考)
2.2数据集处理
2.2.1 CCPD数据处理
1.解压ccpd,cprd数据集2019,ccpd文件太大解压慢利用程序进行解压
import tarfile
# 指定tar文件路径
tar_path = r".\CCPD2019\CCPD2019.tar"
# 打开tar文件
with tarfile.open(tar_path, "r") as tar:
# 解压所有文件到指定目录
tar.extractall(r".\ccpd")
# 解压完成
print("解压完成")
ccpd数据集处理方法
import os
import shutil
import cv2
import numpy as np
from tqdm import tqdm
def allFilePath(rootPath, allFIleList):
'''
获取指定目录下所有以.jpg结尾的文件的路径并将这些路径存储在一个列表中。
'''
fileList = os.listdir(rootPath)
for temp in fileList:
if os.path.isfile(os.path.join(rootPath, temp)):
if temp.endswith(".jpg"):
allFIleList.append(os.path.join(rootPath, temp))
else:
allFilePath(os.path.join(rootPath, temp), allFIleList)
def order_points(pts):
'''
对给定的坐标点进行排序使得列表中的第一个点是左上角第二个点是右上角第三个点是右下角第四个点是左下角。返回排序后的坐标点列表。
'''
# initialzie a list of coordinates that will be ordered
# such that the first entry in the list is the top-left,
# the second entry is the top-right, the third is the
# bottom-right, and the fourth is the bottom-left
pts = pts[:4, :]
rect = np.zeros((5, 2), dtype="float32")
# the top-left point will have the smallest sum, whereas
# the bottom-right point will have the largest sum
s = pts.sum(axis=1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# now, compute the difference between the points, the
# top-right point will have the smallest difference,
# whereas the bottom-left will have the largest difference
diff = np.diff(pts, axis=1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
# return the ordered coordinates
return rect
def get_rect_and_landmarks(img_path):
'''该函数用于从图像文件路径中解析出矩形框和关键点的坐标并返回解析后的结果。'''
file_name = img_path.split("/")[-1].split("-")
landmarks_np = np.zeros((5, 2))
rect = file_name[2].split("_")
landmarks = file_name[3].split("_")
rect_str = "&".join(rect)
landmarks_str = "&".join(landmarks)
rect = rect_str.split("&")
landmarks = landmarks_str.split("&")
rect = [int(x) for x in rect]
landmarks = [int(x) for x in landmarks]
for i in range(4):
landmarks_np[i][0] = landmarks[2 * i]
landmarks_np[i][1] = landmarks[2 * i + 1]
# middle_landmark_w =int((landmarks[4]+landmarks[6])/2)
# middle_landmark_h =int((landmarks[5]+landmarks[7])/2)
# landmarks.append(middle_landmark_w)
# landmarks.append(middle_landmark_h)
landmarks_np_new = order_points(landmarks_np)
# landmarks_np_new[4]=np.array([middle_landmark_w,middle_landmark_h])
return rect, landmarks, landmarks_np_new
def x1x2y1y2_yolo(rect, landmarks, img):
h, w, c = img.shape
rect[0] = max(0, rect[0])
rect[1] = max(0, rect[1])
rect[2] = min(w - 1, rect[2] - rect[0])
rect[3] = min(h - 1, rect[3] - rect[1])
annotation = np.zeros((1, 14))
annotation[0, 0] = (rect[0] + rect[2] / 2) / w # cx
annotation[0, 1] = (rect[1] + rect[3] / 2) / h # cy
annotation[0, 2] = rect[2] / w # w
annotation[0, 3] = rect[3] / h # h
annotation[0, 4] = landmarks[0] / w # l0_x
annotation[0, 5] = landmarks[1] / h # l0_y
annotation[0, 6] = landmarks[2] / w # l1_x
annotation[0, 7] = landmarks[3] / h # l1_y
annotation[0, 8] = landmarks[4] / w # l2_x
annotation[0, 9] = landmarks[5] / h # l2_y
annotation[0, 10] = landmarks[6] / w # l3_x
annotation[0, 11] = landmarks[7] / h # l3_y
# annotation[0, 12] = landmarks[8] / w # l4_x
# annotation[0, 13] = landmarks[9] / h # l4_y
return annotation
def xywh2yolo(rect, landmarks_sort, img):
h, w, c = img.shape
rect[0] = max(0, rect[0])
rect[1] = max(0, rect[1])
rect[2] = min(w - 1, rect[2] - rect[0])
rect[3] = min(h - 1, rect[3] - rect[1])
annotation = np.zeros((1, 12))
annotation[0, 0] = (rect[0] + rect[2] / 2) / w # cx
annotation[0, 1] = (rect[1] + rect[3] / 2) / h # cy
annotation[0, 2] = rect[2] / w # w
annotation[0, 3] = rect[3] / h # h
annotation[0, 4] = landmarks_sort[0][0] / w # l0_x
annotation[0, 5] = landmarks_sort[0][1] / h # l0_y
annotation[0, 6] = landmarks_sort[1][0] / w # l1_x
annotation[0, 7] = landmarks_sort[1][1] / h # l1_y
annotation[0, 8] = landmarks_sort[2][0] / w # l2_x
annotation[0, 9] = landmarks_sort[2][1] / h # l2_y
annotation[0, 10] = landmarks_sort[3][0] / w # l3_x
annotation[0, 11] = landmarks_sort[3][1] / h # l3_y
# annotation[0, 12] = landmarks_sort[4][0] / w # l4_x
# annotation[0, 13] = landmarks_sort[4][1] / h # l4_y
return annotation
def yolo2x1y1x2y2(annotation, img):
h, w, c = img.shape
rect = annotation[:, 0:4].squeeze().tolist()
landmarks = annotation[:, 4:].squeeze().tolist()
rect_w = w * rect[2]
rect_h = h * rect[3]
rect_x = int(rect[0] * w - rect_w / 2)
rect_y = int(rect[1] * h - rect_h / 2)
new_rect = [rect_x, rect_y, rect_x + rect_w, rect_y + rect_h]
for i in range(5):
landmarks[2 * i] = landmarks[2 * i] * w
landmarks[2 * i + 1] = landmarks[2 * i + 1] * h
return new_rect, landmarks
def update_txt(file_root = r"I:/CCPD2019/ccpd",save_img_path=r"H:\data\images",save_txt_path="H:\data\labels"):
print(file_root, "start!!!!!")
file_list = []
count = 0
allFilePath(file_root, file_list)
# print(file_list)
# exit()
for img_path in file_list:
count += 1
# img_path = r"ccpd_yolo_test/02-90_85-173&466_452&541-452&553_176&556_178&463_454&460-0_0_6_26_15_26_32-68-53.jpg"
text_path = img_path.replace(".jpg", ".txt")
# 读取图片
img = cv2.imread(img_path)
rect, landmarks, landmarks_sort = get_rect_and_landmarks(img_path)
# annotation=x1x2y1y2_yolo(rect,landmarks,img)
annotation = xywh2yolo(rect, landmarks_sort, img)
str_label = "0 "
for i in range(len(annotation[0])):
str_label = str_label + " " + str(annotation[0][i])
str_label = str_label.replace('[', '').replace(']', '')
str_label = str_label.replace(',', '') + '\n'
# if os.path.exists(text_path):
# continue
# else:
shutil.move(img_path,os.path.join(os.path.join(save_img_path,os.path.basename(img_path))))
text_path_save = os.path.join(save_txt_path,os.path.basename(text_path))
# print(text_path_save)
# exit()
with open(text_path_save, "w") as f:
f.write(str_label)
print(text_path,"finished!")
# print(count, img_path)
print(os.getpid(),"end!!!")
def delete_non_jpg_images(image_folder):
for filename in os.listdir(image_folder):
if not filename.endswith(".jpg"):
file_path = os.path.join(image_folder, filename)
os.remove(file_path)
print("删除完毕")
def move_files_to_folders(images_folder, folders_folder, labels_folder):
for filename in os.listdir(images_folder):
if filename.endswith(".jpg"):
image_path = os.path.join(images_folder, filename)
label_path = os.path.join(images_folder, os.path.splitext(filename)[0] + ".txt")
folder_path = os.path.join(folders_folder, filename)
labels_folder_path = os.path.join(labels_folder, os.path.splitext(filename)[0] + ".txt")
if not os.path.exists(folder_path) and not os.path.exists(labels_folder_path) and os.path.exists(label_path):
# 不存在同名
shutil.move(image_path, folder_path)
shutil.move(label_path, labels_folder_path)
if __name__ == '__main__':
# 1. 处理ccpd文件夹
import multiprocessing
pool = multiprocessing.Pool(processes=14) # 这里使用4个进程
files = []
for dir in os.listdir(r"I:/CCPD2019/ccpd"):
files.append(os.path.join(r"I:/CCPD2019/ccpd",dir))
# 使用进程池执行任务
results = pool.map(update_txt,files)
# 关闭进程池防止新任务被提交
pool.close()
# 等待所有任务完成
pool.join()
# 2. 清理异常文件夹
# 调用删除非jpg图像的函数
image_folder = r"H:\data\images"
# 删除文件
delete_non_jpg_images(image_folder)
# 3.加入一些新增文件夹文件
# 指定文件夹路径
# images_folder = r"single_yellow_val"
# folders_folder = r"H:\data\images"
# labels_folder = r"H:\data\labels"
# # 调用移动文件的函数
# move_files_to_folders(images_folder, folders_folder, labels_folder)
处理后文件,共计329499个文件
处理后为类别+左上角+右下角+4个角点
2.2.2 CPRD数据集处理
Unified Chinese License Plate Detection and Recognition with High Efficiency(Arxiv 2022)
这段话描述了标签文件夹中的txt文件的注释格式。每个txt文件的文件名与相应图像的名称相同。
在txt文件中每一行表示图像中的一个车牌LP的注释。
一个LP的注释格式如下
x1y1x2y2x3y3x4y4typecontent
前八个数字表示边界四边形的坐标。
"type"注释表示LP的类型0表示蓝色车牌1表示黄色单线车牌2表示黄色双线车牌3表示白色车牌。
"content"注释表示LP的内容。
2.3 检测算法
YOLOv5-Face是YOLOv5的一个改进版本特别针对人脸检测任务。它添加了一个5-Point Landmark Regression Head关键点回归并对Landmark Regression Head使用了Wing loss进行约束。此外YOLOv5-Face还设计了不同模型尺寸的检测器从大模型到超小模型以实现在嵌入式或移动设备上的实时检测。在WiderFace数据集上的实验结果表明YOLOv5-Face在几乎所有的Easy、Medium和Hard子集上都能达到最先进的性能超过了特定设计的人脸检测器。与许多其他的人脸检测器不同YOLOv5-Face把人脸检测作为一个一般的目标检测任务来看待。
这里将yolov5-face 修改为四个关键点做目标检测任务
2.3.1 数据配置car_plate.yaml
# PASCAL VOC dataset http://host.robots.ox.ac.uk/pascal/VOC/
# Train command: python train.py --data voc.yaml
# Default dataset location is next to /yolov5:
# /parent_folder
# /VOC
# /yolov5
# download command/URL (optional)
download: bash data/scripts/get_voc.sh
# train and val data as 1) directory: path/images/, 2) file: path/images.txt, or 3) list: [path1/images/, path2/images/]
train: E:/data/train/images
val: E:/data/val_detect/val
# number of classes
nc: 2
# class names
names: [ 'single_plate','double_plate']
2.3.2 模型配置
# parameters
nc: 2 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 0.5 # layer channel multiple
# anchors
anchors:
- [4,5, 8,10, 13,16] # P3/8
- [23,29, 43,55, 73,105] # P4/16
- [146,217, 231,300, 335,433] # P5/32
# YOLOv5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, StemBlock, [32, 3, 2]], # 0-P2/4
[-1, 1, ShuffleV2Block, [128, 2]], # 1-P3/8
[-1, 3, ShuffleV2Block, [128, 1]], # 2
[-1, 1, ShuffleV2Block, [256, 2]], # 3-P4/16
[-1, 7, ShuffleV2Block, [256, 1]], # 4
[-1, 1, ShuffleV2Block, [512, 2]], # 5-P5/32
[-1, 3, ShuffleV2Block, [512, 1]], # 6
]
# YOLOv5 head
head:
[[-1, 1, Conv, [128, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P4
[-1, 1, C3, [128, False]], # 10
[-1, 1, Conv, [128, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 2], 1, Concat, [1]], # cat backbone P3
[-1, 1, C3, [128, False]], # 14 (P3/8-small)
[-1, 1, Conv, [128, 3, 2]],
[[-1, 11], 1, Concat, [1]], # cat head P4
[-1, 1, C3, [128, False]], # 17 (P4/16-medium)
[-1, 1, Conv, [128, 3, 2]],
[[-1, 7], 1, Concat, [1]], # cat head P5
[-1, 1, C3, [128, False]], # 20 (P5/32-large)
[[14, 17, 20], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
2.3.3 train.py
parser = argparse.ArgumentParser()
# 权重
parser.add_argument('--weights', type=str, default='best.pt', help='initial weights path')
# 默认配置文件
parser.add_argument('--cfg', type=str, default='models/car_plate.yaml', help='model.yaml path')
parser.add_argument('--data', type=str, default='data/car_plate.yaml', help='data.yaml path')
parser.add_argument('--hyp', type=str, default='data/hyp.scratch.yaml', help='hyperparameters path')
parser.add_argument('--epochs', type=int, default=10)
parser.add_argument('--batch-size', type=int, default=64, help='total batch size for all GPUs')
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--notest', action='store_true', help='only test final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--multi-scale', action='store_true', default=True, help='vary img-size +/- 50%%')
parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
parser.add_argument('--log-imgs', type=int, default=2, help='number of images for W&B logging, max 100')
parser.add_argument('--log-artifacts', action='store_true', help='log artifacts, i.e. final trained model')
parser.add_argument('--workers', type=int, default=4, help='maximum number of dataloader workers')
parser.add_argument('--project', default='runs/train', help='save to project/name')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
2.3.4 训练结果


2.4 部署
2.4.1 pth推理detect.py
#!/usr/bin/env python
import warnings
warnings.filterwarnings("ignore")
import os
import cv2
import numpy as np
import time
import torch
import copy
from models.experimental import attempt_load
from utils.datasets import letterbox
from utils.general import check_img_size, non_max_suppression_face, scale_coords
from utils.torch_utils import time_synchronized
clors = [(255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255)]
def load_model(weights, device):
model = attempt_load(weights, map_location=device) # load FP32 model
return model
def scale_coords_landmarks(img1_shape, coords, img0_shape, ratio_pad=None):
# Rescale coords (xyxy) from img1_shape to img0_shape
if ratio_pad is None: # calculate from img0_shape
gain = min(img1_shape[0] / img0_shape[0], img1_shape[1] / img0_shape[1]) # gain = old / new
pad = (img1_shape[1] - img0_shape[1] * gain) / 2, (img1_shape[0] - img0_shape[0] * gain) / 2 # wh padding
else:
gain = ratio_pad[0][0]
pad = ratio_pad[1]
coords[:, [0, 2, 4, 6]] -= pad[0] # x padding
coords[:, [1, 3, 5, 7]] -= pad[1] # y padding
coords[:, :10] /= gain
# clip_coords(coords, img0_shape)
coords[:, 0].clamp_(0, img0_shape[1]) # x1
coords[:, 1].clamp_(0, img0_shape[0]) # y1
coords[:, 2].clamp_(0, img0_shape[1]) # x2
coords[:, 3].clamp_(0, img0_shape[0]) # y2
coords[:, 4].clamp_(0, img0_shape[1]) # x3
coords[:, 5].clamp_(0, img0_shape[0]) # y3
coords[:, 6].clamp_(0, img0_shape[1]) # x4
coords[:, 7].clamp_(0, img0_shape[0]) # y4
# coords[:, 8].clamp_(0, img0_shape[1]) # x5
# coords[:, 9].clamp_(0, img0_shape[0]) # y5
return coords
def get_plate_rec_landmark(img, xyxy, conf, landmarks, class_num, device):
h, w, c = img.shape
result_dict = {}
tl = 1 or round(0.002 * (h + w) / 2) + 1 # line/font thickness
x1 = int(xyxy[0])
y1 = int(xyxy[1])
x2 = int(xyxy[2])
y2 = int(xyxy[3])
landmarks_np = np.zeros((4, 2))
rect = [x1, y1, x2, y2]
for i in range(4):
point_x = int(landmarks[2 * i])
point_y = int(landmarks[2 * i + 1])
landmarks_np[i] = np.array([point_x, point_y])
class_label = int(class_num) # 车牌的的类型0代表单牌1代表双层车牌
result_dict['box'] = rect
result_dict['landmarks'] = landmarks_np.tolist()
result_dict['class'] = class_label
return result_dict
class Detect:
def __init__(self, conf_thres=0.6, iou_thres=0.5, img_size=640):
self.conf_thres = conf_thres
self.iou_thres = iou_thres
self.img_size = img_size
self.device = "cuda" if torch.cuda.is_available() else "cpu"
self.detect_model = load_model("weights/best.pt", self.device)
def detect(self, orgimg):
dict_list = []
if orgimg is None:
return []
if orgimg.shape[-1] == 4:
orgimg = cv2.cvtColor(orgimg, cv2.COLOR_BGRA2BGR)
h0, w0 = orgimg.shape[:2] # orig hw
img0 = copy.deepcopy(orgimg)
r = self.img_size / max(h0, w0) # resize image to img_size
if r != 1: # always resize down, only resize up if training with augmentation
interp = cv2.INTER_AREA if r < 1 else cv2.INTER_LINEAR
img0 = cv2.resize(img0, (int(w0 * r), int(h0 * r)), interpolation=interp)
imgsz = check_img_size(self.img_size, s=self.detect_model.stride.max()) # check img_size
img = letterbox(img0, new_shape=imgsz,auto=False)[0]
# Convert
img = img[:, :, ::-1].transpose(2, 0, 1).copy() # BGR to RGB, to 3x416x416
# Run inference
t0 = time.time()
img = torch.from_numpy(img).to(self.device)
img = img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
# Inference
t1 = time_synchronized()
pred = self.detect_model(img)[0]
print(pred.shape)
t2 = time_synchronized()
print(f"infer time is {(t2-t1)*1000} ms")
# Apply NMS
pred = non_max_suppression_face(pred, self.conf_thres, self.iou_thres)
# print(pred.shape)
# Process detections
for i, det in enumerate(pred): # detections per image
if len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], orgimg.shape).round()
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
det[:, 5:13] = scale_coords_landmarks(img.shape[2:], det[:, 5:13], orgimg.shape).round()
for j in range(det.size()[0]):
xyxy = det[j, :4].view(-1).tolist()
conf = det[j, 4].cpu().numpy()
landmarks = det[j, 5:13].view(-1).tolist()
class_num = det[j, 13].cpu().numpy()
result_dict = get_plate_rec_landmark(orgimg, xyxy, conf, landmarks, class_num, self.device)
dict_list.append(result_dict)
return dict_list
def draw_result(self, orgimg, dict_list):
'''
返回绘制之后的原图
'''
for result in dict_list:
rect_area = result['box']
x, y, w, h = rect_area[0], rect_area[1], rect_area[2] - rect_area[0], rect_area[3] - rect_area[1]
padding_w = 0.05 * w
padding_h = 0.11 * h
rect_area[0] = max(0, int(x - padding_w))
rect_area[1] = max(0, int(y - padding_h))
rect_area[2] = min(orgimg.shape[1], int(rect_area[2] + padding_w))
rect_area[3] = min(orgimg.shape[0], int(rect_area[3] + padding_h))
landmarks = result['landmarks']
label = result['class']
# result_str+=result+" "
for i in range(4): # 关键点
cv2.circle(orgimg, (int(landmarks[i][0]), int(landmarks[i][1])), 5, clors[i], -1)
cv2.rectangle(orgimg, (rect_area[0], rect_area[1]), (rect_area[2], rect_area[3]), clors[label], 2) # 画框
cv2.putText(img, str(label), (rect_area[0], rect_area[1]), cv2.FONT_HERSHEY_SIMPLEX, 0.5, clors[label], 2)
return orgimg
if __name__ == '__main__':
det = Detect()
img_dir = "images"
save_dir = "result"
if not os.path.exists(save_dir):
os.makedirs(save_dir)
for file in os.listdir(img_dir):
img_path = os.path.join(img_dir,file)
img = cv2.imdecode(np.fromfile(img_path, dtype=np.uint8), -1)
dict_list = det.detect(img)
# print(dict_list)
result_img = det.draw_result(img, dict_list)
save_dir_path = os.path.join(save_dir,file)
cv2.imwrite(save_dir_path,result_img)
2.4.2 onnx推理
import argparse
import time, os
import torch
from detect import scale_coords_landmarks, get_plate_rec_landmark
from torch2trt.trt_model import TrtModel
from utils.general import non_max_suppression_face, scale_coords, check_img_size
import cv2
import copy
from utils.torch_utils import time_synchronized
import numpy as np
clors = [(255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255)]
def letterbox(img, size=(640, 640)):
h, w, c = img.shape
# 缩放因子
ratio = min(size[0] / h, size[1] / w)
new_h, new_w = int(h * ratio), int(w * ratio)
top = int((size[0] - new_h) / 2)
left = int((size[1] - new_w) / 2)
bottom = size[0] - new_h - top
right = size[1] - new_w - left
img_resize = cv2.resize(img, (new_w, new_h))
img = cv2.copyMakeBorder(img_resize, top, bottom, left, right, borderType=cv2.BORDER_CONSTANT,
value=(114, 114, 114))
return img, ratio, left, top
def nms(boxes, iou_thresh):
# numpy nms
index = np.argsort(boxes[:, 4])[::-1]
keep = []
while index.size > 0:
i = index[0]
keep.append(i)
x1 = np.maximum(boxes[i, 0], boxes[index[1:], 0])
y1 = np.maximum(boxes[i, 1], boxes[index[1:], 1])
x2 = np.minimum(boxes[i, 2], boxes[index[1:], 2])
y2 = np.minimum(boxes[i, 3], boxes[index[1:], 3])
w = np.maximum(0, x2 - x1)
h = np.maximum(0, y2 - y1)
inter_area = w * h
union_area = (boxes[i, 2] - boxes[i, 0]) * (boxes[i, 3] - boxes[i, 1]) + (
boxes[index[1:], 2] - boxes[index[1:], 0]) * (boxes[index[1:], 3] - boxes[index[1:], 1])
iou = inter_area / (union_area - inter_area)
idx = np.where(iou <= iou_thresh)[0]
index = index[idx + 1]
return keep
def restore_box(boxes, r, left, top): # 返回原图上面的坐标
boxes[:, [0, 2, 5, 7, 9, 11]] -= left
boxes[:, [1, 3, 6, 8, 10, 12]] -= top
boxes[:, [0, 2, 5, 7, 9, 11]] /= r
boxes[:, [1, 3, 6, 8, 10, 12]] /= r
return boxes
def post_precessing(dets, ratio, left, top, conf_thresh=0.3, iou_thresh=0.5): # 检测后处理
# 选取大于置信度的
choice = dets[:, :, 4] > conf_thresh
dets = dets[choice]
dets[:, 13:15] *= dets[:, 4:5]
box = dets[:, :4]
boxes = xywh2xyxy(box)
score = np.max(dets[:, 13:15], axis=-1, keepdims=True)
index = np.argmax(dets[:, 13:15], axis=-1).reshape(-1, 1)
output = np.concatenate((boxes, score, dets[:, 5:13], index), axis=1)
reserve_ = nms(output, iou_thresh)
output = output[reserve_]
output = restore_box(output, ratio, left, top)
return output
def xywh2xyxy(boxes): # xywh坐标变为 左上 右下坐标 x1,y1 x2,y2
xywh = copy.deepcopy(boxes)
xywh[:, 0] = boxes[:, 0] - boxes[:, 2] / 2
xywh[:, 1] = boxes[:, 1] - boxes[:, 3] / 2
xywh[:, 2] = boxes[:, 0] + boxes[:, 2] / 2
xywh[:, 3] = boxes[:, 1] + boxes[:, 3] / 2
return xywh
class Detect:
def __init__(self, conf_thres=0.6, iou_thres=0.5, img_size=640, trt_path="weights/best.trt"):
self.conf_thres = conf_thres
self.iou_thres = iou_thres
self.img_size = img_size
self.device = "cuda" if torch.cuda.is_available() else "cpu"
self.detect_model = TrtModel(trt_path)
def detect_processing(self, img, img_size=(640, 640)):
img, ratio, left, top = letterbox(img, size=img_size)
img = img[:, :, ::-1].transpose(2, 0, 1).copy().astype(np.float32)
img = img / 255
img = img.reshape(1, *img.shape)
return img, ratio, left, top
def detect(self, orgimg):
dict_list = []
if orgimg is None:
return []
if orgimg.shape[-1] == 4:
orgimg = cv2.cvtColor(orgimg, cv2.COLOR_BGRA2BGR)
h0, w0 = orgimg.shape[:2] # orig hw
img0 = copy.deepcopy(orgimg)
# imgsz = check_img_size(self.img_size, s=32) # check img_size
img, ratio, left, top = self.detect_processing(img0)
if img.ndim == 3:
img = img[None, ...]
# Inference
t1 = time_synchronized()
pred = self.detect_model(img).reshape([1, 25200, 15])
output = post_precessing(pred, ratio, left, top, conf_thresh=self.conf_thres, iou_thresh=self.iou_thres)
for output in output:
result_dict = {}
rect = output[:4].astype(int).tolist()
land_marks = output[5:13].astype(int).reshape(4, 2)
conf = output[4].astype(int).tolist()
result_dict['box'] = rect
result_dict['class'] = conf
result_dict['landmarks'] = land_marks.tolist()
dict_list.append(result_dict)
return dict_list
def draw_result(self, orgimg, dict_list):
'''
返回绘制之后的原图
'''
for result in dict_list:
rect_area = result['box']
x, y, w, h = rect_area[0], rect_area[1], rect_area[2] - rect_area[0], rect_area[3] - rect_area[1]
padding_w = 0.05 * w
padding_h = 0.11 * h
rect_area[0] = max(0, int(x - padding_w))
rect_area[1] = max(0, int(y - padding_h))
rect_area[2] = min(orgimg.shape[1], int(rect_area[2] + padding_w))
rect_area[3] = min(orgimg.shape[0], int(rect_area[3] + padding_h))
landmarks = result['landmarks']
label = result['class']
# result_str+=result+" "
for i in range(4): # 关键点
cv2.circle(orgimg, (int(landmarks[i][0]), int(landmarks[i][1])), 5, clors[i], -1)
cv2.rectangle(orgimg, (rect_area[0], rect_area[1]), (rect_area[2], rect_area[3]), clors[label], 2) # 画框
cv2.putText(img, str(label), (rect_area[0], rect_area[1]), cv2.FONT_HERSHEY_SIMPLEX, 0.5, clors[label], 2)
return orgimg
def __del__(self):
self.detect_model.destroy()
if __name__ == '__main__':
# ============可视化================
# img_vis(img, orgimg, pred)
det = Detect()
img_dir = "images"
save_dir = "result"
if not os.path.exists(save_dir):
os.makedirs(save_dir)
for file in os.listdir(img_dir):
img_path = os.path.join(img_dir, file)
img = cv2.imdecode(np.fromfile(img_path, dtype=np.uint8), -1)
dict_list = det.detect(img)
print(dict_list)
result_img = det.draw_result(img, dict_list)
save_dir_path = os.path.join(save_dir, file)
cv2.imwrite(save_dir_path, result_img)
2.4.3 trt推理
import argparse
import time,os
import torch
from detect import scale_coords_landmarks, get_plate_rec_landmark
from torch2trt.trt_model import TrtModel
from utils.datasets import letterbox
from utils.general import non_max_suppression_face, scale_coords, check_img_size
import cv2
import copy
from utils.torch_utils import time_synchronized
import numpy as np
clors = [(255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255)]
def img_process(img_path,long_side=640,stride_max=32):
'''
图像预处理
'''
orgimg=cv2.imread(img_path)
img0 = copy.deepcopy(orgimg)
h0, w0 = orgimg.shape[:2] # orig hw
r = long_side/ max(h0, w0) # resize image to img_size
if r != 1: # always resize down, only resize up if training with augmentation
interp = cv2.INTER_AREA if r < 1 else cv2.INTER_LINEAR
img0 = cv2.resize(img0, (int(w0 * r), int(h0 * r)), interpolation=interp)
imgsz = check_img_size(long_side, s=stride_max) # check img_size
img = letterbox(img0, new_shape=imgsz,auto=False)[0] # auto True最小矩形 False固定尺度
# Convert
img = img[:, :, ::-1].transpose(2, 0, 1).copy() # BGR to RGB, to 3x416x416
img = torch.from_numpy(img)
img = img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
return img,orgimg
class Detect:
def __init__(self, conf_thres=0.6, iou_thres=0.5, img_size=640,trt_path="weights/best.trt"):
self.conf_thres = conf_thres
self.iou_thres = iou_thres
self.img_size = img_size
self.device = "cuda" if torch.cuda.is_available() else "cpu"
self.detect_model = TrtModel(trt_path)
def detect(self, orgimg):
dict_list = []
if orgimg is None:
return []
if orgimg.shape[-1] == 4:
orgimg = cv2.cvtColor(orgimg, cv2.COLOR_BGRA2BGR)
h0, w0 = orgimg.shape[:2] # orig hw
img0 = copy.deepcopy(orgimg)
r = self.img_size / max(h0, w0) # resize image to img_size
if r != 1: # always resize down, only resize up if training with augmentation
interp = cv2.INTER_AREA if r < 1 else cv2.INTER_LINEAR
img0 = cv2.resize(img0, (int(w0 * r), int(h0 * r)), interpolation=interp)
imgsz = check_img_size(self.img_size, s=32) # check img_size
img = letterbox(img0, new_shape=imgsz,auto=False)[0]
# Convert
img = img[:, :, ::-1].transpose(2, 0, 1).copy() # BGR to RGB, to 3x416x416
# Run inference
t0 = time.time()
# img = torch.from_numpy(img).to(self.device)
img = img.astype(float) # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndim == 3:
img = img[None,...]
# Inference
t1 = time_synchronized()
pred = self.detect_model(img).reshape([1, 25200, 15])
t2 = time_synchronized()
print(f"infer time is {(t2-t1)*1000} ms")
# Apply NMS
# pred = torch.tensor(pred)
pred = non_max_suppression_face(torch.tensor(pred), self.conf_thres, self.iou_thres)
# print(type(pred))
# Process detections
for i, det in enumerate(pred): # detections per image
if len(det):
# Rescale boxes from img_size to im0 size
# print(type(det))
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], orgimg.shape).round()
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
det[:, 5:13] = scale_coords_landmarks(img.shape[2:], det[:, 5:13], orgimg.shape).round()
for j in range(det.size()[0]):
xyxy = det[j, :4].view(-1).tolist()
conf = det[j, 4].cpu().numpy()
landmarks = det[j, 5:13].view(-1).tolist()
class_num = det[j, 13].cpu().numpy()
result_dict = get_plate_rec_landmark(orgimg, xyxy, conf, landmarks, class_num, self.device)
dict_list.append(result_dict)
return dict_list
def draw_result(self, orgimg, dict_list):
'''
返回绘制之后的原图
'''
for result in dict_list:
rect_area = result['box']
x, y, w, h = rect_area[0], rect_area[1], rect_area[2] - rect_area[0], rect_area[3] - rect_area[1]
padding_w = 0.05 * w
padding_h = 0.11 * h
rect_area[0] = max(0, int(x - padding_w))
rect_area[1] = max(0, int(y - padding_h))
rect_area[2] = min(orgimg.shape[1], int(rect_area[2] + padding_w))
rect_area[3] = min(orgimg.shape[0], int(rect_area[3] + padding_h))
landmarks = result['landmarks']
label = result['class']
# result_str+=result+" "
for i in range(4): # 关键点
cv2.circle(orgimg, (int(landmarks[i][0]), int(landmarks[i][1])), 5, clors[i], -1)
cv2.rectangle(orgimg, (rect_area[0], rect_area[1]), (rect_area[2], rect_area[3]), clors[label], 2) # 画框
cv2.putText(img, str(label), (rect_area[0], rect_area[1]), cv2.FONT_HERSHEY_SIMPLEX, 0.5, clors[label], 2)
return orgimg
def __del__(self):
self.detect_model.destroy()
if __name__ == '__main__':
# ============可视化================
# img_vis(img, orgimg, pred)
det = Detect()
img_dir = "images"
save_dir = "result"
if not os.path.exists(save_dir):
os.makedirs(save_dir)
for file in os.listdir(img_dir):
img_path = os.path.join(img_dir, file)
img = cv2.imdecode(np.fromfile(img_path, dtype=np.uint8), -1)
dict_list = det.detect(img)
print(dict_list)
result_img = det.draw_result(img, dict_list)
save_dir_path = os.path.join(save_dir, file)
cv2.imwrite(save_dir_path, result_img)
2.4.4 numpy版本trt推理
import argparse
import time, os
import torch
from detect import scale_coords_landmarks, get_plate_rec_landmark
from torch2trt.trt_model import TrtModel
from utils.general import non_max_suppression_face, scale_coords, check_img_size
import cv2
import copy
from utils.torch_utils import time_synchronized
import numpy as np
clors = [(255, 0, 0), (0, 255, 0), (0, 0, 255), (255, 255, 0), (0, 255, 255)]
def letterbox(img, size=(640, 640)):
h, w, c = img.shape
# 缩放因子
ratio = min(size[0] / h, size[1] / w)
new_h, new_w = int(h * ratio), int(w * ratio)
top = int((size[0] - new_h) / 2)
left = int((size[1] - new_w) / 2)
bottom = size[0] - new_h - top
right = size[1] - new_w - left
img_resize = cv2.resize(img, (new_w, new_h))
img = cv2.copyMakeBorder(img_resize, top, bottom, left, right, borderType=cv2.BORDER_CONSTANT,
value=(114, 114, 114))
return img, ratio, left, top
def nms(boxes, iou_thresh):
# numpy nms
index = np.argsort(boxes[:, 4])[::-1]
keep = []
while index.size > 0:
i = index[0]
keep.append(i)
x1 = np.maximum(boxes[i, 0], boxes[index[1:], 0])
y1 = np.maximum(boxes[i, 1], boxes[index[1:], 1])
x2 = np.minimum(boxes[i, 2], boxes[index[1:], 2])
y2 = np.minimum(boxes[i, 3], boxes[index[1:], 3])
w = np.maximum(0, x2 - x1)
h = np.maximum(0, y2 - y1)
inter_area = w * h
union_area = (boxes[i, 2] - boxes[i, 0]) * (boxes[i, 3] - boxes[i, 1]) + (
boxes[index[1:], 2] - boxes[index[1:], 0]) * (boxes[index[1:], 3] - boxes[index[1:], 1])
iou = inter_area / (union_area - inter_area)
idx = np.where(iou <= iou_thresh)[0]
index = index[idx + 1]
return keep
def restore_box(boxes, r, left, top): # 返回原图上面的坐标
boxes[:, [0, 2, 5, 7, 9, 11]] -= left
boxes[:, [1, 3, 6, 8, 10, 12]] -= top
boxes[:, [0, 2, 5, 7, 9, 11]] /= r
boxes[:, [1, 3, 6, 8, 10, 12]] /= r
return boxes
def post_precessing(dets, ratio, left, top, conf_thresh=0.3, iou_thresh=0.5): # 检测后处理
# 选取大于置信度的
choice = dets[:, :, 4] > conf_thresh
dets = dets[choice]
dets[:, 13:15] *= dets[:, 4:5]
box = dets[:, :4]
boxes = xywh2xyxy(box)
score = np.max(dets[:, 13:15], axis=-1, keepdims=True)
index = np.argmax(dets[:, 13:15], axis=-1).reshape(-1, 1)
output = np.concatenate((boxes, score, dets[:, 5:13], index), axis=1)
reserve_ = nms(output, iou_thresh)
output = output[reserve_]
output = restore_box(output, ratio, left, top)
return output
def xywh2xyxy(boxes): # xywh坐标变为 左上 右下坐标 x1,y1 x2,y2
xywh = copy.deepcopy(boxes)
xywh[:, 0] = boxes[:, 0] - boxes[:, 2] / 2
xywh[:, 1] = boxes[:, 1] - boxes[:, 3] / 2
xywh[:, 2] = boxes[:, 0] + boxes[:, 2] / 2
xywh[:, 3] = boxes[:, 1] + boxes[:, 3] / 2
return xywh
class Detect:
def __init__(self, conf_thres=0.6, iou_thres=0.5, img_size=640, trt_path="weights/best.trt"):
self.conf_thres = conf_thres
self.iou_thres = iou_thres
self.img_size = img_size
self.device = "cuda" if torch.cuda.is_available() else "cpu"
self.detect_model = TrtModel(trt_path)
def detect_processing(self, img, img_size=(640, 640)):
img, ratio, left, top = letterbox(img, size=img_size)
img = img[:, :, ::-1].transpose(2, 0, 1).copy().astype(np.float32)
img = img / 255
img = img.reshape(1, *img.shape)
return img, ratio, left, top
def detect(self, orgimg):
dict_list = []
if orgimg is None:
return []
if orgimg.shape[-1] == 4:
orgimg = cv2.cvtColor(orgimg, cv2.COLOR_BGRA2BGR)
h0, w0 = orgimg.shape[:2] # orig hw
img0 = copy.deepcopy(orgimg)
# imgsz = check_img_size(self.img_size, s=32) # check img_size
img, ratio, left, top = self.detect_processing(img0)
if img.ndim == 3:
img = img[None, ...]
# Inference
t1 = time_synchronized()
pred = self.detect_model(img).reshape([1, 25200, 15])
output = post_precessing(pred, ratio, left, top, conf_thresh=self.conf_thres, iou_thresh=self.iou_thres)
for output in output:
result_dict = {}
rect = output[:4].astype(int).tolist()
land_marks = output[5:13].astype(int).reshape(4, 2)
conf = output[4].astype(int).tolist()
result_dict['box'] = rect
result_dict['class'] = conf
result_dict['landmarks'] = land_marks.tolist()
dict_list.append(result_dict)
return dict_list
def draw_result(self, orgimg, dict_list):
'''
返回绘制之后的原图
'''
for result in dict_list:
rect_area = result['box']
x, y, w, h = rect_area[0], rect_area[1], rect_area[2] - rect_area[0], rect_area[3] - rect_area[1]
padding_w = 0.05 * w
padding_h = 0.11 * h
rect_area[0] = max(0, int(x - padding_w))
rect_area[1] = max(0, int(y - padding_h))
rect_area[2] = min(orgimg.shape[1], int(rect_area[2] + padding_w))
rect_area[3] = min(orgimg.shape[0], int(rect_area[3] + padding_h))
landmarks = result['landmarks']
label = result['class']
# result_str+=result+" "
for i in range(4): # 关键点
cv2.circle(orgimg, (int(landmarks[i][0]), int(landmarks[i][1])), 5, clors[i], -1)
cv2.rectangle(orgimg, (rect_area[0], rect_area[1]), (rect_area[2], rect_area[3]), clors[label], 2) # 画框
cv2.putText(img, str(label), (rect_area[0], rect_area[1]), cv2.FONT_HERSHEY_SIMPLEX, 0.5, clors[label], 2)
return orgimg
def __del__(self):
self.detect_model.destroy()
if __name__ == '__main__':
# ============可视化================
# img_vis(img, orgimg, pred)
det = Detect()
img_dir = "images"
save_dir = "result"
if not os.path.exists(save_dir):
os.makedirs(save_dir)
for file in os.listdir(img_dir):
img_path = os.path.join(img_dir, file)
img = cv2.imdecode(np.fromfile(img_path, dtype=np.uint8), -1)
dict_list = det.detect(img)
print(dict_list)
result_img = det.draw_result(img, dict_list)
save_dir_path = os.path.join(save_dir, file)
cv2.imwrite(save_dir_path, result_img)
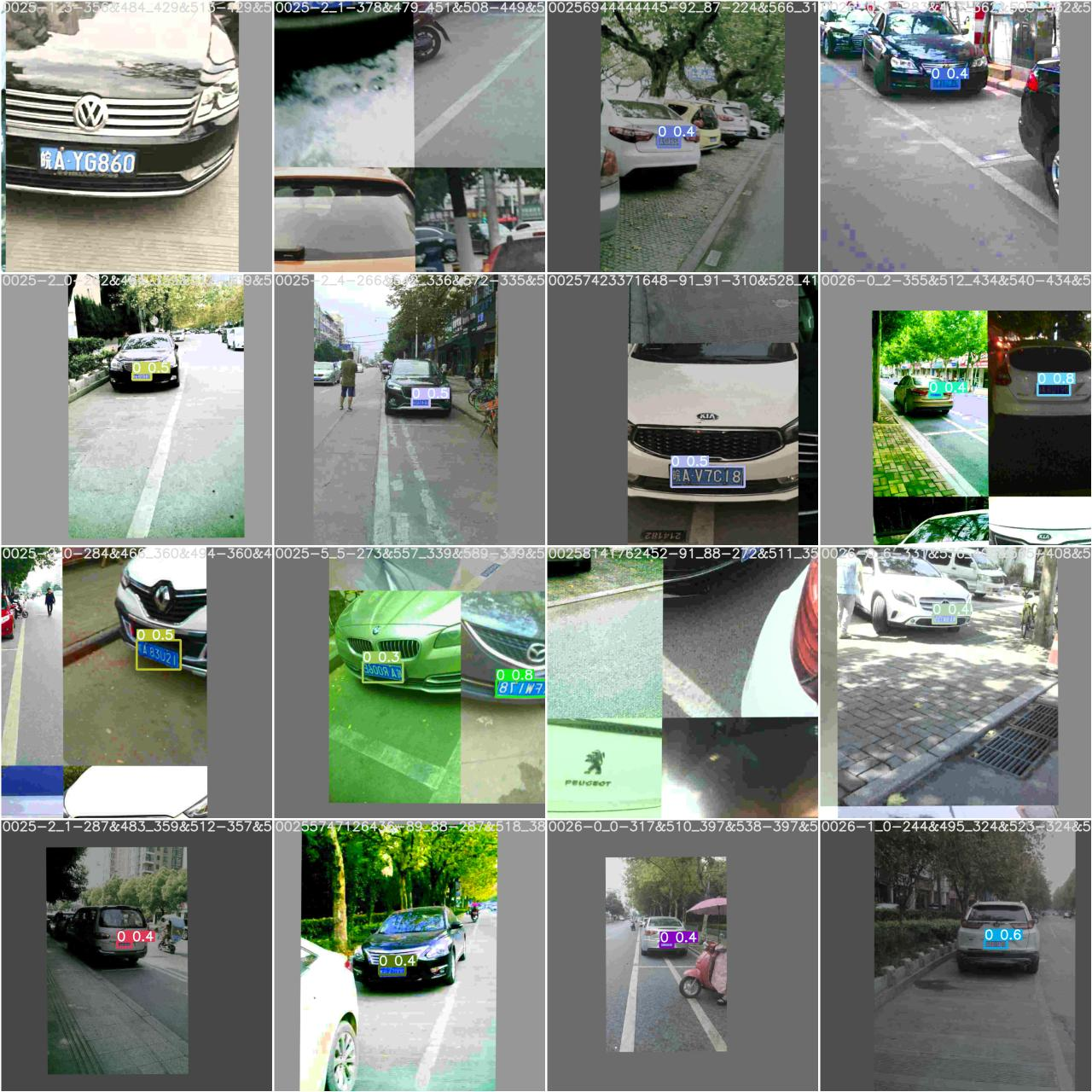
2.4.5 推理结果展示






参考开源
Chinese_license_plate_detection_recognition
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |