

鱼眼图像去畸变python / c++-CSDN博客
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
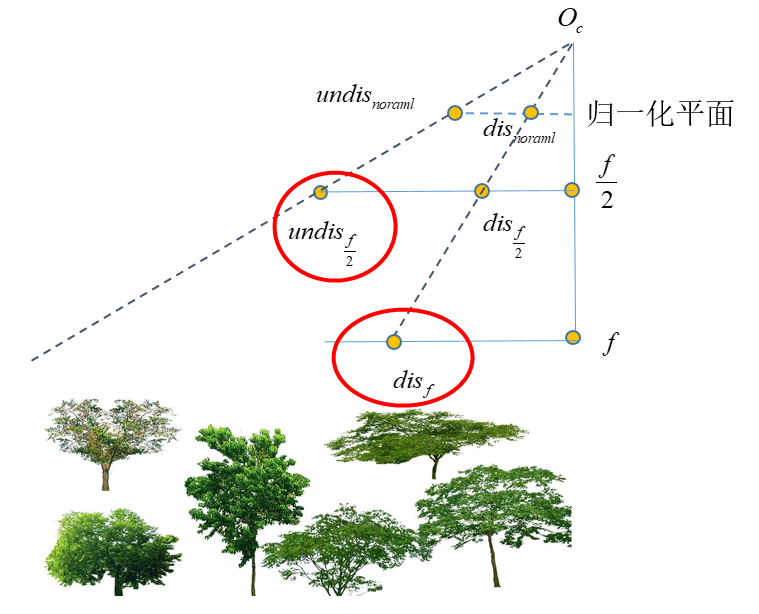
本文假设去畸变后的图像与原图大小一样大。由于去畸变后的图像符合针孔投影模型因此不同的去畸变焦距得到不同的视场大小且物体的分辨率也不同。可以见上图当焦距缩小为一半时相同大小的图像横向投影距离一样长对应的视场角不同。所以为了扩大视野需要缩小焦距作为相机坐标系到去畸变图像的投影内参焦距。
理论方面不再多说直接上代码
C++ 版本
#include <opencv2/opencv.hpp>
#include <string>
#include <math.h>
using namespace std;
//图像去畸变部分///
int main(){
cv::Size img_sizea;
std::string image_file = "test.jpeg";
cv::Mat src = cv::imread(image_file);
cv::Mat distortiona(img_sizea,CV_8UC3);
// 内参
cv::Mat camera_matrixa = (cv::Mat_<double>(3, 3) << 5.4108215568312232e+02, 0.0, 1.0318237337253406e+03, 0, 5.4083086444334469e+02, 1.0225293088570558e+03, 0, 0, 1);
cv::Mat distortion_coefficientsa=(cv::Mat_<double >(1,4)<<1.0926628389307196e-01,-6.5713320780575097e-04,8.4866561354316559e-03,-4.2045330300667406e-03);
cv::Mat new_intrinsic_mat(3, 3, CV_64FC1, cv::Scalar(0));
camera_matrixa.copyTo(new_intrinsic_mat);
//调整输出校正图的视场
new_intrinsic_mat.at<double>(0, 0) *= 0.4; //注意数据类型非常重要
new_intrinsic_mat.at<double>(1, 1) *= 0.4;
//调整输出校正图的中心
new_intrinsic_mat.at<double>(0, 2) *= 1.0;
new_intrinsic_mat.at<double>(1, 2) *= 1.0;
// new_intrinsic_mat.at<double>(0, 2) += 0.0;
// new_intrinsic_mat.at<double>(1, 2) += 0.0;
cv::fisheye::undistortImage(src, distortiona, camera_matrixa,
distortion_coefficientsa, new_intrinsic_mat);
cv::resize(distortiona, distortiona, cv::Size(1024,1024));
cv::imshow("undistort", distortiona);
cv::waitKey(0);
imwrite("undistort.jpg", distortiona);
return 0;
}
Python 版本
import cv2 as cv
import numpy as np
def fisheye_undistortion(img, K, D, fs):
#一定要使用copy,作为不同的变量
newK = K.copy()
#调整输出校正图的视场
newK[0][0] = fs * newK[0][0]
newK[1][1] = fs * newK[1][1]
#调整输出校正图的中心
newK[0][2] = 1.0 * newK[0][2]
newK[1][2] = 1.0 * newK[1][2]
undis_img = cv.fisheye.undistortImage(img, K, D, None, newK)
return undis_img, newK
def camera2undistortionimg(camera_point, newK):
x = camera_point[0] / camera_point[2]
y = camera_point[1] / camera_point[2]
u = x * newK[0][0] + newK[0][2]
v = y * newK[1][1] + newK[1][2]
return [u, v]
#内参
K = np.array([[5.4108215568312232e+02, 0.0, 1.0318237337253406e+03],
[0, 5.4083086444334469e+02, 1.0225293088570558e+03],
[0, 0, 1]], dtype=np.float32)
#畸变系数
D = np.array([[1.0926628389307196e-01],
[-6.5713320780575097e-04],
[8.4866561354316559e-03],
[-4.2045330300667406e-03]], dtype=np.float32)
#读取图像
srcimg = cv.imread("./test.jpeg")
#去畸变
fs = 0.4 #焦距比例控制控制视场大小
undis_img, newK = fisheye_undistortion(srcimg, K, D, fs)
print(newK)
#相机到去畸变图像映射
camera_p = (-20, 20, 6)
[u, v] = camera2undistortionimg(camera_p, newK)
print([u, v])
#显示验证
cv.circle(undis_img,(int(u), int(v)), 10, (0,0,255), -1)
undis_img = cv.resize(undis_img,(1024, 1024))
cv.imshow("undis_img",undis_img)
cv.waitKey(0)
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |