

低压差线性稳压器(LDO)设计与仿真_ldo设计
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
低压差线性稳压器(LDO)设计与仿真
0.电源管理芯片
大到汽车智能灯具智能电视小到平板智能手机蓝牙手环等等虽然它们实现的功能各有不同但这些电子设备都有一个共同点它们都需要能为其供电的电源管理芯片。电源之于电子器件就好像飞机发动机之于飞机一样一个高稳定性高精度高灵敏度的电源管理芯片决定着电子设备能否高性能的实现其功能以及使用寿命的长短因此研究电源管理芯片很有意义。开关稳压器和线性稳压器是使用频率最高的两种电源供给器件。
开关稳压器具有可升压、可降压、较宽的电压输出范围以及效率高等特点但同时具有模块庞杂外围器件多纹波抑制比较低输出噪声大等缺点常见的开关稳压器有DC-DC、charge pump等
线性稳压器有传统线性稳压器和低压差(LDO)线性稳压器。LDO 线性稳压器有电路模块小、瞬态响应快、功耗低、噪声小、电源抑制比高、工作性能稳定等突出的特点缺点为效率较低。
1.LDO 的基本结构和基本原理
1.1 LDO的基本结构
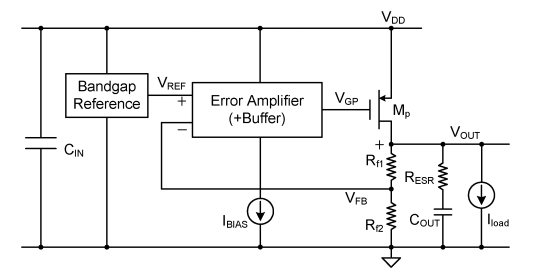
常见的LDO结构包括带隙基准源、误差放大器、功率管和电阻反馈电路四个基本模块。LDO通过检测来自电阻反馈网络的输出电压并与带隙基准提供的恒定输入电压进行比对再由误差放大器将比对后的压差信号放大传输到功率管进行线性调整使得输出电压与输入参考电压维持相应的比值不变产生稳定的电压输出。
带隙基准电路(BandGap) 为LDO 电路提供不受温度和负载大小变化影响的稳定偏置电压。带隙基准电路的设计将直接影响LDO的输出噪声输出电压电源电压抑制比等等因此带隙基准电路的设计是尤为重要的。
误差放大器(EA) 是LDO 的关键功能实现模块。误差放大器的增益直接作用到LDO 的输出电压精度、负载调整率、线性调整率和 PSRR 上误差放大器的带宽与LDO 的瞬时响应能力紧密关联当误差放大器的带宽不够大时LDO 系统很难保证有较好的瞬态响应能力。因此高性能宽的误差放大器对 LDO 系统来说是不可或缺的是 LDO 整体功能实现的重要保障。
功率管为负载电路提供大的输出电流因此功率管通常都是由大尺寸的晶体管构成。PMOS 器件有着比 NMOS 器件更低的噪声参数以及更低的压差值因此在LDO的设计中一般采用PMOS作为功率管。
电阻反馈网络一般由两个电阻串联构成电阻间的分压确定了 LDO 输出电压的数值。
1.2 LDO的基本原理
误差放大器、功率管和电阻反馈网络构成负反馈环路当 LDO 的输出电压增大时反馈电阻检测到输出信号的改变使反馈电压也跟着增大增大的电压信号传输到误差放大器的同相端与误差放大器的基准电压输入端进行比较得到一个电压差再由误差放大器放大该电压差进而提高功率管栅端的电压达到降低输出电流的目的于是 LDO 的输出电压降低抑制了输出电压上升的趋势。当 LDO 的输出电压降低时负反馈环路将使功率管栅压降低增大输出电流LDO输出电压将升高抑制了其下降的趋势。当环路增益很大时系统处于深度负反馈输出电压Vout可写为

2. LDO主要性能参数
2.1 压差
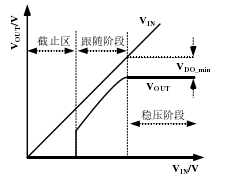
LDO 的压差是系统处于稳态时输入与输出电压之间最小的差值。当输入电压很小时电路处于截止状态此时输出电压接近为零。当输入电压升高到某一值时输出电压开始跟随输入电压逐步升高并在达到一定值后保持不变此时 LDO 进入稳压工作状态。具体工作过程见下图
2.2 静态电流与效率
静态电流 Iq是LDO稳定工作时输入电流与输出电流的差值。静态电流包括误差放大器、基准电压源、电阻反馈网络的偏置电流和功率晶体管的驱动电流即除外部负载外系统内部消耗的总电流。LDO的效率定义为
即负载功率除以总功率。
2.3 负载调整率
负载调整率(LDR)是衡量在负载电流发生改变的情形下输出电压维持在特定值附近的能力表达式为
其中Ron为LDO的开环输出电阻βAOL为LDO的环路增益因此可以通过提高 LDO 的直流环路增益来降低 LDO 的负载调整率。

2.4 线性调整率
线性调整率(LNR)是在供电电源电压发生改变的情况下系统输出电压对该变化的抑制能力,表达式为
其中△VOUT变化范围一般为±10%电源电压△VIN分别为其对应的基准电压差值。

2.5 电源抑制比
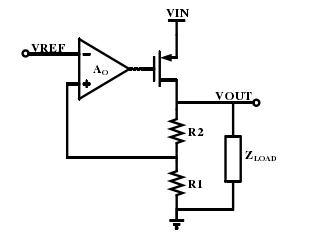
**电源抑制(PSR)可以理解为交流小信号下电压输出基准的线性调整率。**对于下图LDO结构画出小信号模型列节点基尔霍夫电流方程求解可得
其中,RDSP为功率管输出电阻LG为环路增益{ Agmpβ[rds∥(R1+R2)∥ZLOAD] },A为运放增益β为反馈系数gmp为功率管跨导。

2.6 噪声
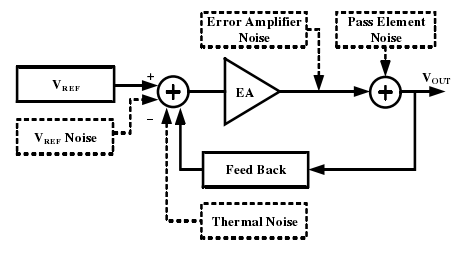
LDO系统噪声来源见下图
其中带隙基准电路所产生的噪声占据了 LDO 总输出噪声的很大一部分可以使用具有低截止频率的低通滤波器进行噪声隔离电压反馈网络的电阻热噪声(4kTR)可以通过降低反馈网络的阻值来减小但同时反馈网络阻值的减小将会导致静态功耗变大这需要我们在两者间进行折衷处理误差放大器的噪声可以通过低噪声设计来减小由于功率管尺寸通常很大因此其闪烁噪声(K/(COXWLf))可以忽略其沟道热噪声没有经误差放大器放大因此功率管噪声忽略不计。LDO 线性稳压器输出噪声的典型值为 100~ 500μVrms。
2.7 瞬态特性
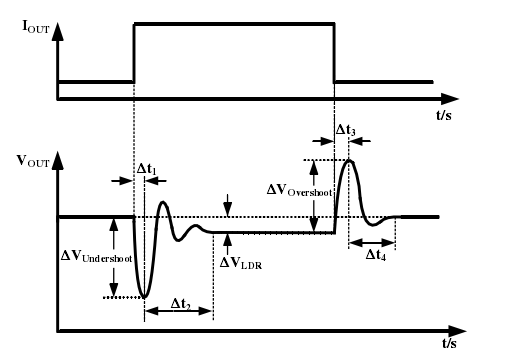
LDO 的瞬态特性一般有两个一个是输出电压因为输入电压的瞬态变化而产生的变化称为线性瞬态响应。另一个是电流载荷在短时间内明显改变时产生的瞬态响应被称为负载瞬态响应。
当负载电流由轻载向重载突变时由于LDO 的带宽以及环路的限制输出电压并不能对负载的变化作出及时的应答因此在负载电流突然增大时电阻反馈网络不能立刻拉低功率管的栅端电压导致功率管无法输出足够的电流此时负载电容 CL 将释放储存的电荷来弥补不足的输出电流在负载电容 CL 放电时间输出电压将出现一个大的下降我们称这个下降电压为下冲(Undershoot )。
相似的当负载电流从重载向轻载突变时受LDO环路带宽的影响系统并不能对负载的变化作出及时的应答功率管将会继续保持大的输出电流一段时间此时的电流大于负载所需要的电流多出来的电流对负载电容 CL 充电输出电压将产生一个大的电压上升我们称这个上升电压为过冲(Overshoot )。
具体过程见下图
瞬态响应的设计目标是尽可能小的下冲电压(Undershoot Voltage)、过冲电压(Overshoot Voltage)和更短的恢复时间(𝛥𝑡1+𝛥𝑡2和𝛥𝑡3+𝛥𝑡4)。
3. LDO的设计与分析
3.1 LDO结构设计
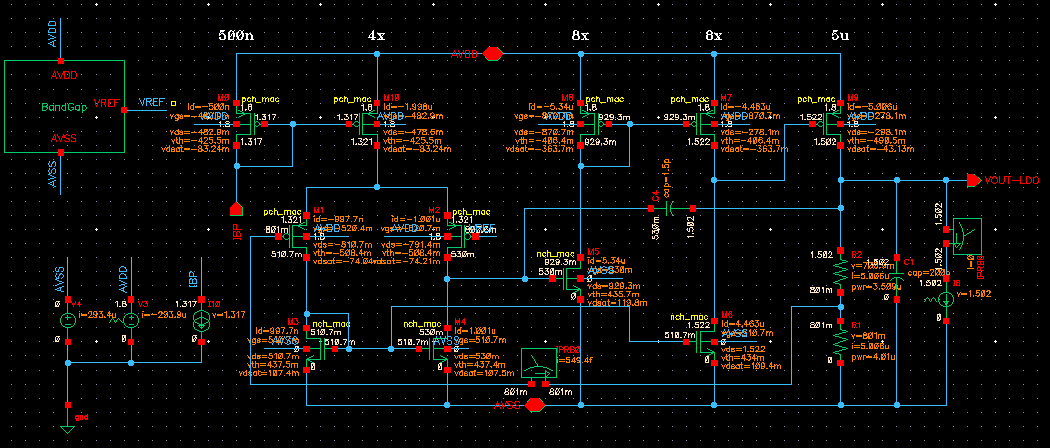
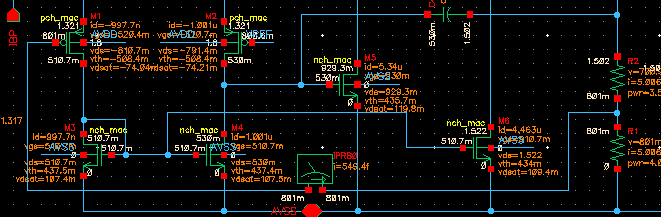
LDO电路结构见图3.1
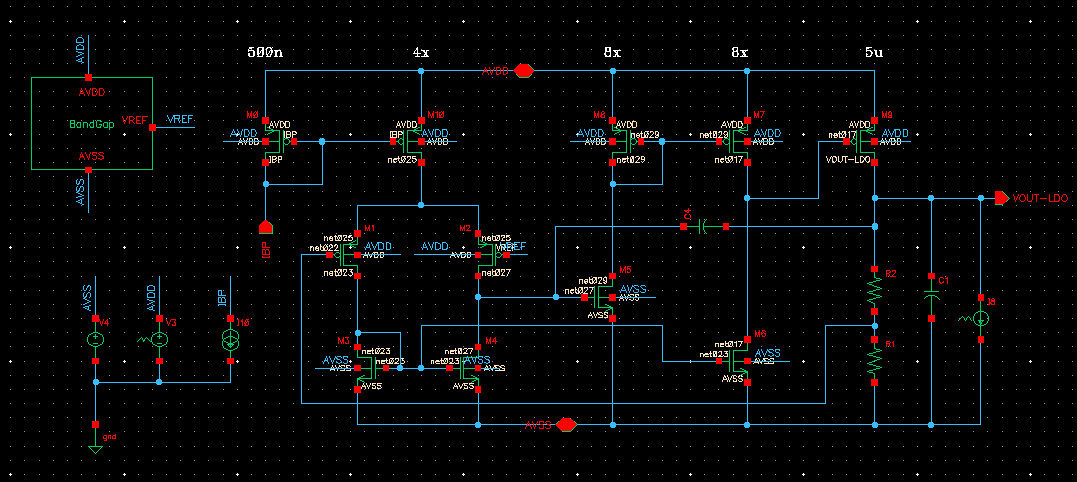
图3.1 LDO电路
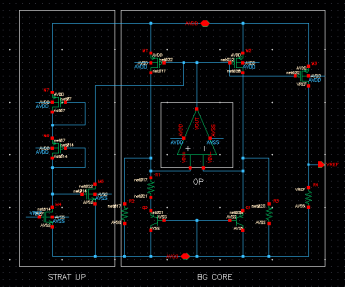
图3.2 BG电路(BG电路的设计见上篇文章)
3.2 LDO电路描述
M1~M8以及M10晶体管构成两级误差放大器为LDO提供更大的环路增益。M0、M10M3、M5和M3、M6构成电流镜其中M0输入500nA直流电流偏置为LDO提供恒定电流。M9为功率管为了给负载提供大的输出电流M9的尺寸设计的很大。使用密勒电容Cm对LDO环路进行频率补偿。带隙基准连接在两级误差放大器的负端输出800mV低温度系数电压调整R1、R2阻值大小得到1.5V LDO输出电压。
3.3 LDO小信号分析
LDO电路小信号模型见下图
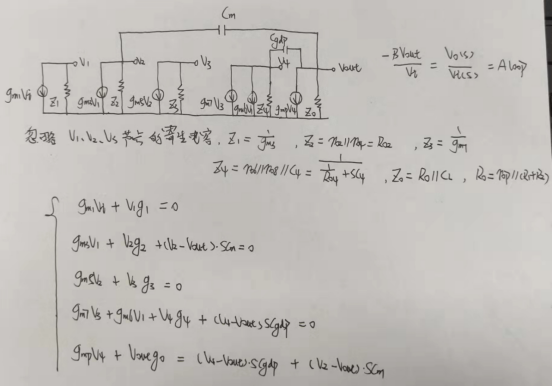
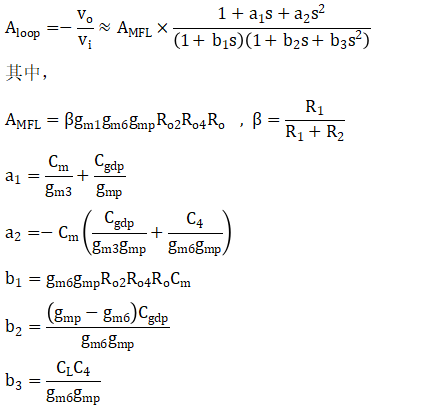
根据小信号模型列节点电流方程解得
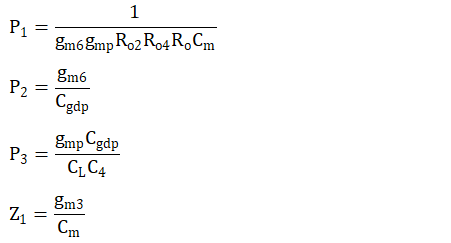
GBW≈βgm1/Cm主极点P1≈1/gm6gmpRo2Ro4Cm。环路有两个零点分别为
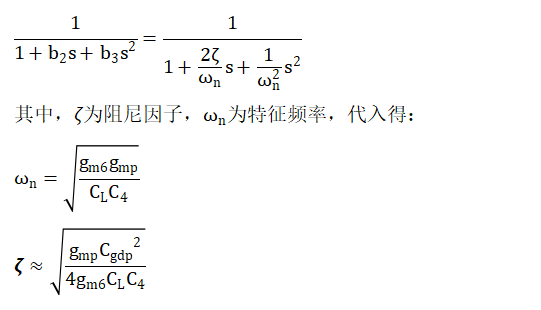
空载时右半面零点Z2远大于左半平面零点Z1,并且随着负载电流增大gmp增大使得Z2进一步增大因此后续分析我们忽略右零点只考虑左零点对环路的影响。我们将1+b2s+b3s2化为标准形式
空载时阻尼因子ζ<1极点为左半平面的两个共轭复根。当负载电流开始增大时ζ随之增大左半平面两个非主极点将变为实根。当负载电流很大时我们有

3.4 器件参数
该LDO晶体管尺寸、电阻阻值以及电容值见下表
| M0 | 1um/1um (W/L) | M1 | 2um/500nm |
|---|---|---|---|
| M2 | 2um/500nm | M3 | 1um/2um |
| M4 | 1um/2um | M5 | 4um/2um |
| M6 | 4um/2um | M7 | 1um/2um |
| M8 | 1um/2um | M9 | 10um*100/200nm |
| M10 | 4um/1um | ||
| R1 | 160kΩ | R2 | 140kΩ |
| Cm | 1.5pF | CL | 200pF |
4. LDO的仿真
4.1 DC仿真
直流特性
空载时LDO DC仿真结果如下
4x、8x表示对偏置电流放大4倍和8倍功率管静态电流为5uALDO输出电压为1.502V。空载时M0~M8以及M10均处于饱和区由于M9尺寸很大为了流过5uA的静态电流M9将处于亚阈值区。
另外对负载电流在0~50mA范围内进行参数扫描输出功率管M9的跨导和region曲线
(仿真方法为对ILOAD进行参数扫描-tool-Results browser-calculator-dcOpinfo-选中M9-选择gm和region-右键Append)
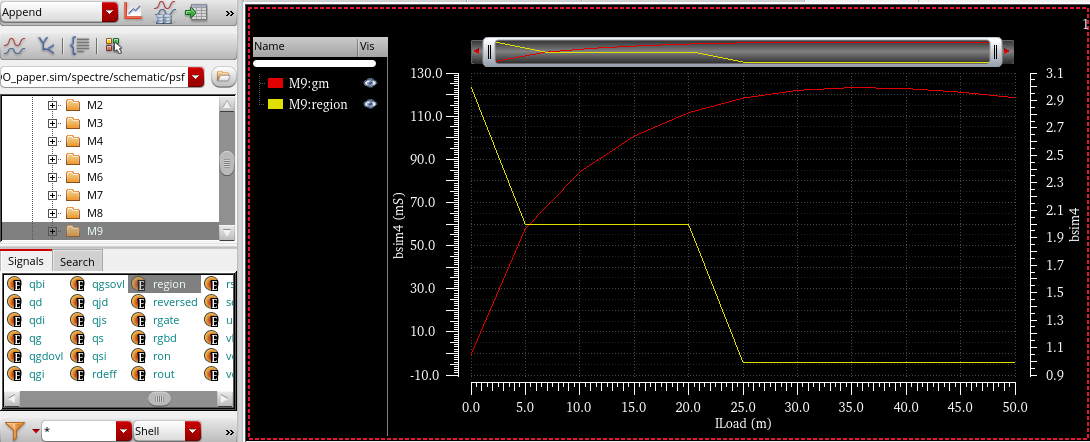
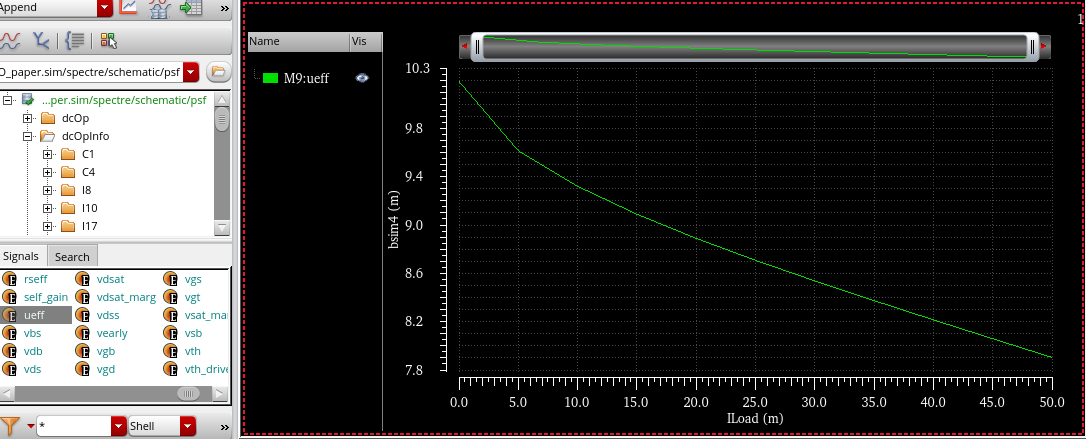
可见随着负载电流由0增大到5mA时功率管M9由亚阈值区进入饱和区跨导增大。随着负载电流继续增大到5mA时M9进入饱和区跨导随着过驱动电压增大而增大。在25mA负载电流时M9进入了线性区此时跨导开始下降这是因为由于过驱动电压增大受纵向电场影响MOS管实际载流子迁移率开始下降
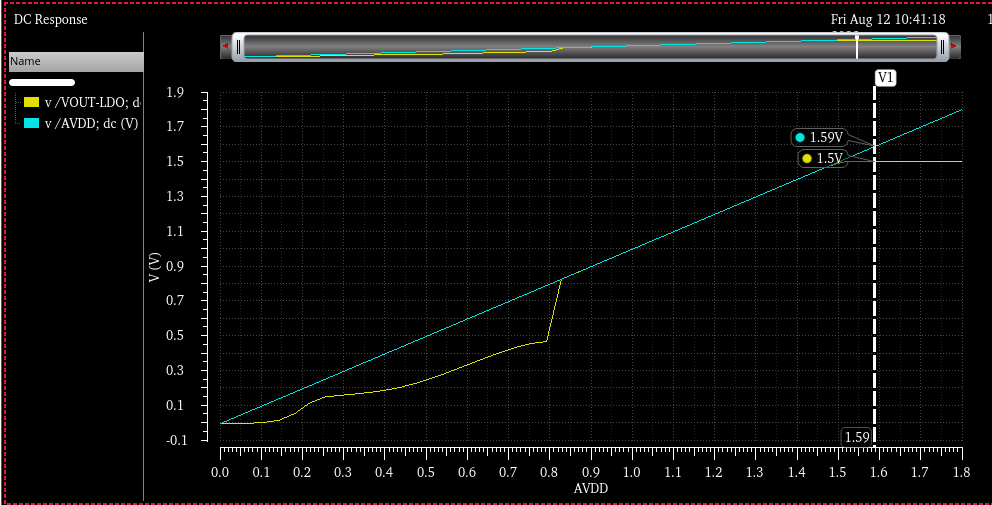
压差
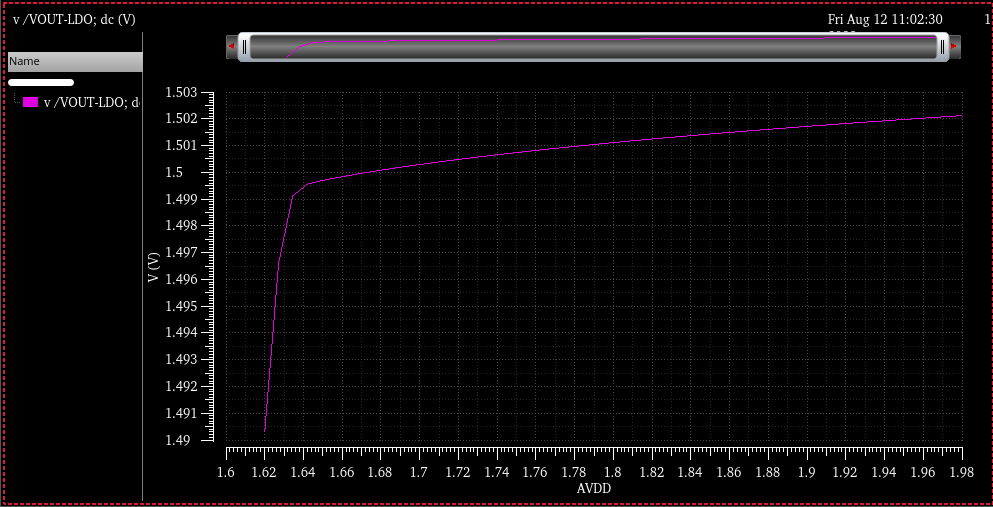
在0~1.8V范围内扫描电源电压
仿真得出压差约为90mV
线性调增率
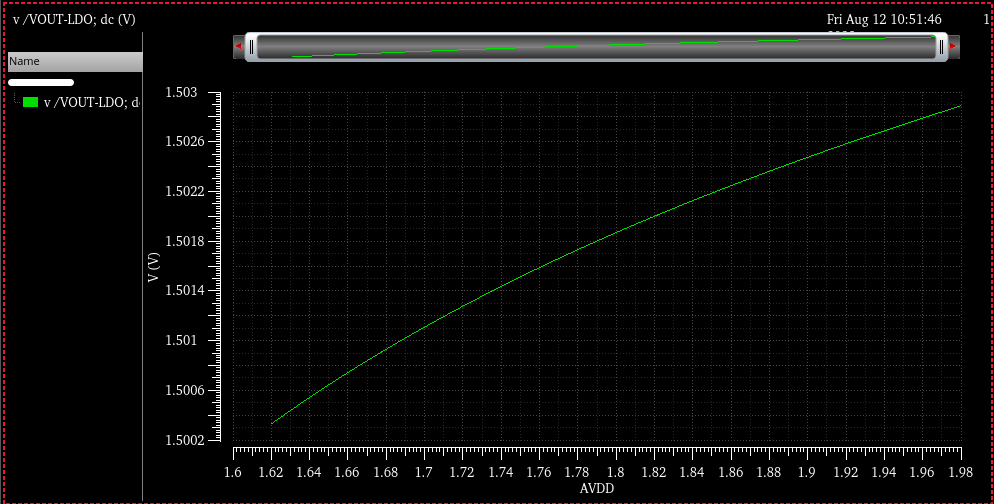
空载时在1.62V~1.98V范围内扫描电源电压
仿真得出空载时线性调整率为0.472%
重载时(50mA)在1.62V~1.98V范围内扫描电源电压
仿真得出重载时线性调整率为2.178%。


负载调整率
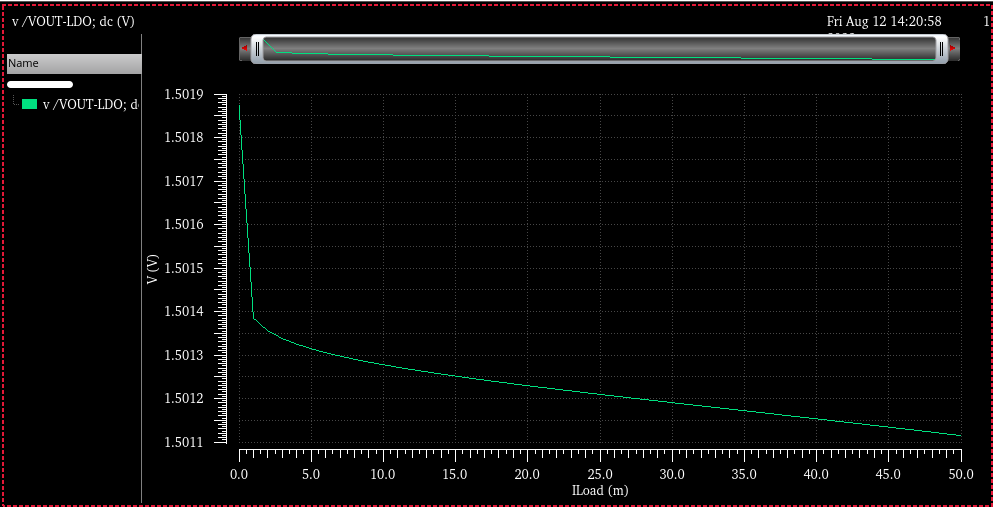
在(050mA)范围内扫描负载电流
仿真得出负载调整率为0.504%

4.2 stb仿真
环路稳定性
在主反馈环路添加iprobe见下图
空载时环路稳定性仿真结果如下


在(0,50mA)对ILOAD进行参数扫描输出环路增益曲线见下图:
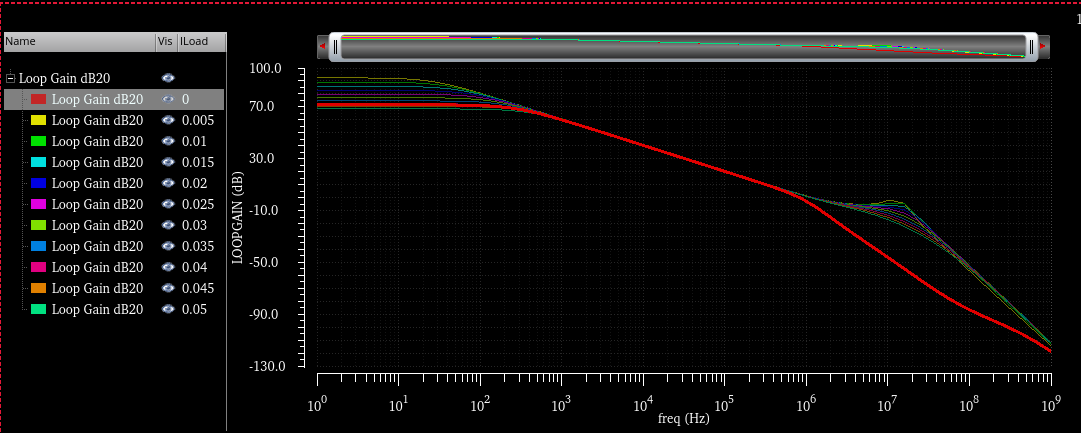
对于上图我们作以下分析
1.直流增益为什么先增大后减小
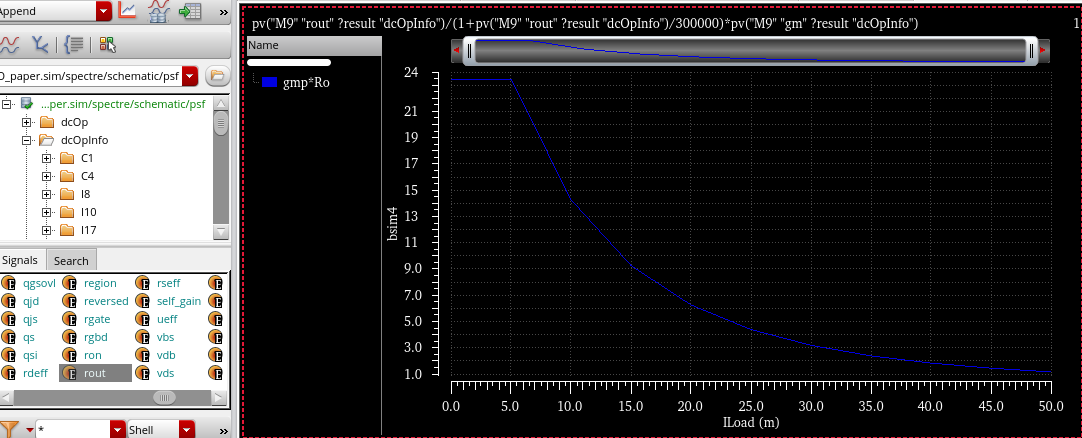
在3.3节小信号中我们推导出直流增益表达式为:βgm1gm6gmpRo2Ro4Ro,对gmpRo进行参数扫描
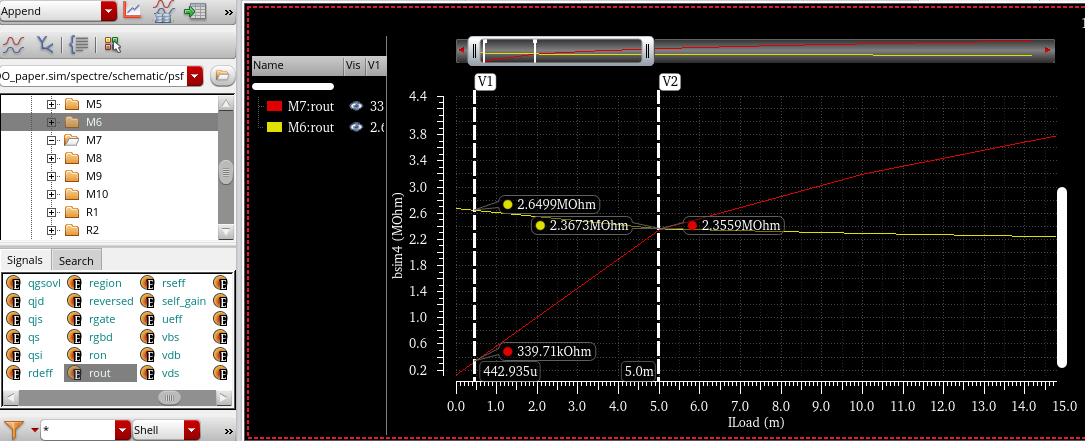
仿真发现gmpRo在轻载时并没有增加那么直流增益为什么会有近20dB的提升呢分析发现由于M9在空载时工作于亚阈值区这导致M9栅极电位很高使得M7工作于线性区RO4很小。画出M7与M6输出电阻:
可见Ro4在负载电流从0增大到5mA时电阻增大了近十倍直流增益增大近20dB。当负载电流继续增大时由于gmpRo≈2/λ(VGS-VTH)过驱动电压增大将导致gmpRo减小因此直流增益开始减小。
2.零极点是怎么移动的
在3.3节小信号分析可知随着负载电流增大主极点由于Ro2的增大而左移在Ro2值稳定后将随着gmpRo减小而右移。左零点为gm3/Cm位于GBW附近同时阻尼因子将随着负载电流增大而增大当阻尼因子大于1时左半平面两个共轭极点将变为实极点直流增益尖峰开始减小P2、P3极点分离程度增大此时环路次极点位于gm6/Cgdp附近P3极点随着负载电流增大右移。
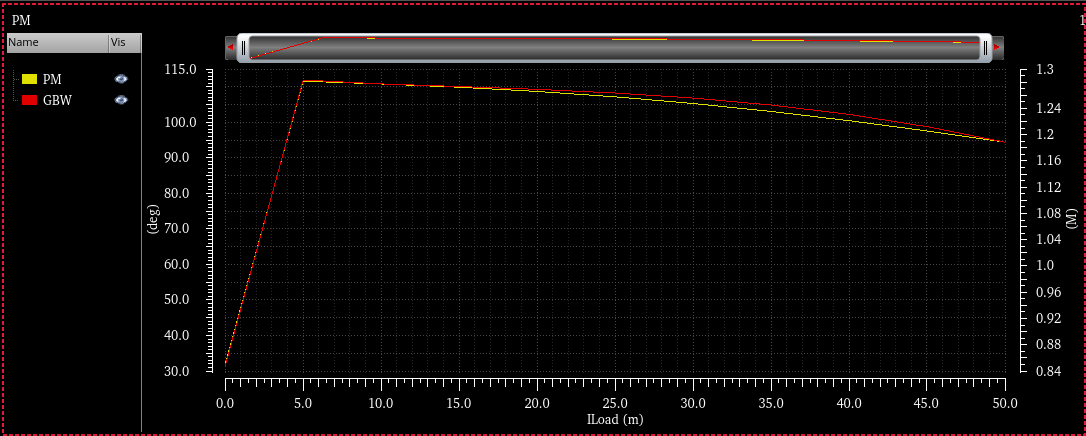
3.相位裕度PM和GBW为什么先增大后减小
轻载时由于主极点左移共轭极点向实极点转化次极点右移相位裕度将增大很多同时直流增益有近20dB的提升因此GBW也将增大。当电流负载电流继续增大时主极点右移而次极点位置近乎不变主极点向次极点靠近相位裕度减小同时直流增益将持续下降GBW也将减小。
4.3 ac仿真
电源抑制(PSR)
空载和满载PSR仿真结果如下

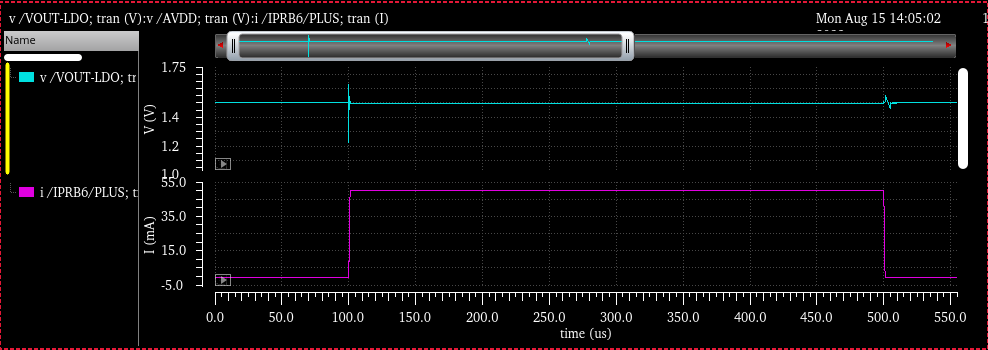
4.4 tran仿真
电流跳变
负载电源跳变用ipwl电源模拟设置ILOAD从0跳变到50mA跳变时间为1us。
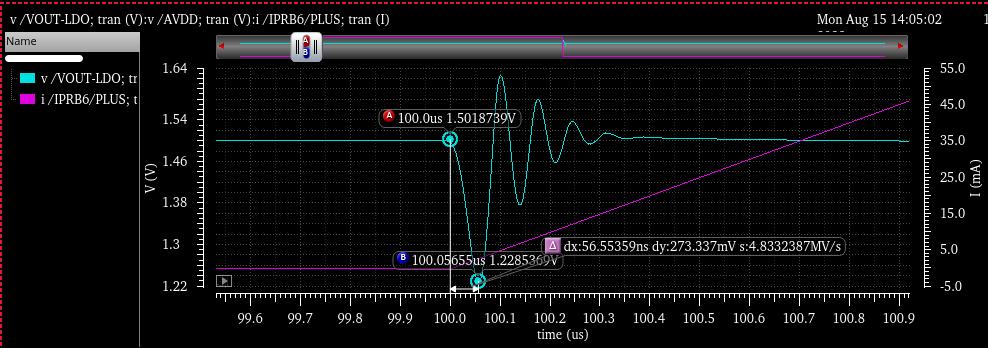
使用键盘A、B键可选取曲线上的两点
仿真得undershoot为273mV overshoot为56mV。

4.5 noise仿真
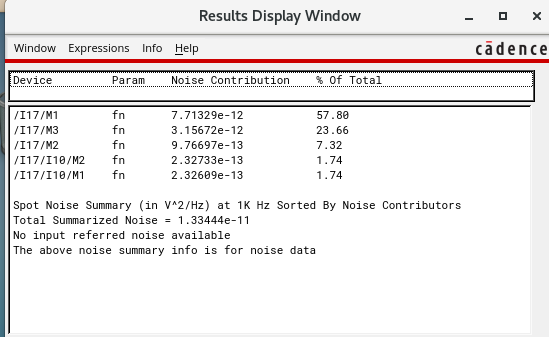
正如2.17节噪声分析那样带隙基准噪声占LDO噪声绝大部分。输出噪声曲线如下
对输出噪声曲线在1~100kHz范围内积分并开根号得输出噪声为

