Ubuntu20.04+MAVROS+PX4+Gazebo安装教程
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
Ubuntu20.04+MAVROS+PX4+Gazebo
安装PX4步骤
从github上clone源码
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
进入PX4-Autopilot文件夹继续下载未下载完的组件
cd PX4-Autopilot/
git submodule update --init --recursive
继续执行ubuntu.sh脚本
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh
中间出错的话执行指令
python3 -m pip install --upgrade pip
python3 -m pip install --upgrade Pillow
如果过程中有安装失败的地方可以再用
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh --fix-missing
更新一下完成后重启系统
测试一下
进入你下载的PX4-Autopilot文件夹内
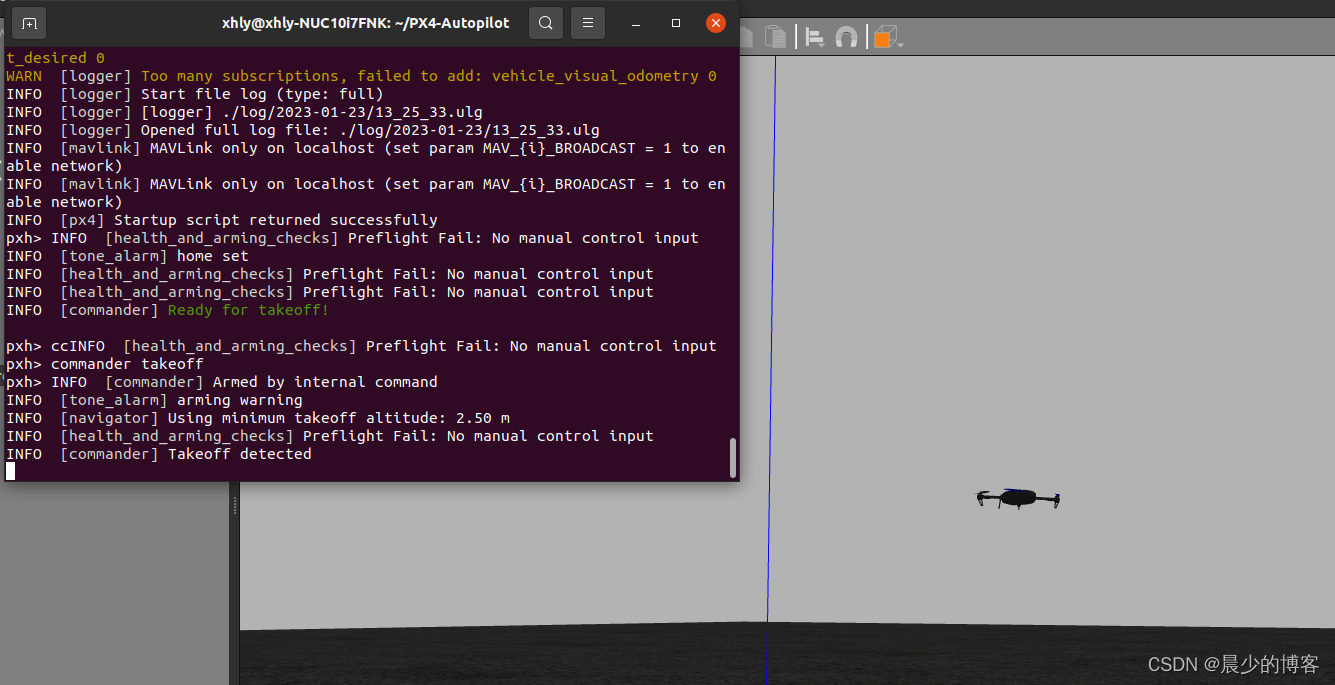
make px4_sitl_default gazebo
终端输入 commander takeoff 可以看到无人机起飞
终端输入 commander land 可以看到无人机降落
添加环境变量针对Ubuntu20.04
source ~/PX4-Autopilot/Tools/simulation/gazebo-classic/setup_gazebo.bash ~/PX4-Autopilot ~/PX4-Autopilot/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4-Autopilot/Tools/simulation/gazebo-classic/sitl_gazebo-classic
安装MAVROS
sudo apt-get install ros-melodic-mavros ros-melodic-mavros-extras
运行以下命令测试
roslaunch mavros px4.launch
如果出现以下报错
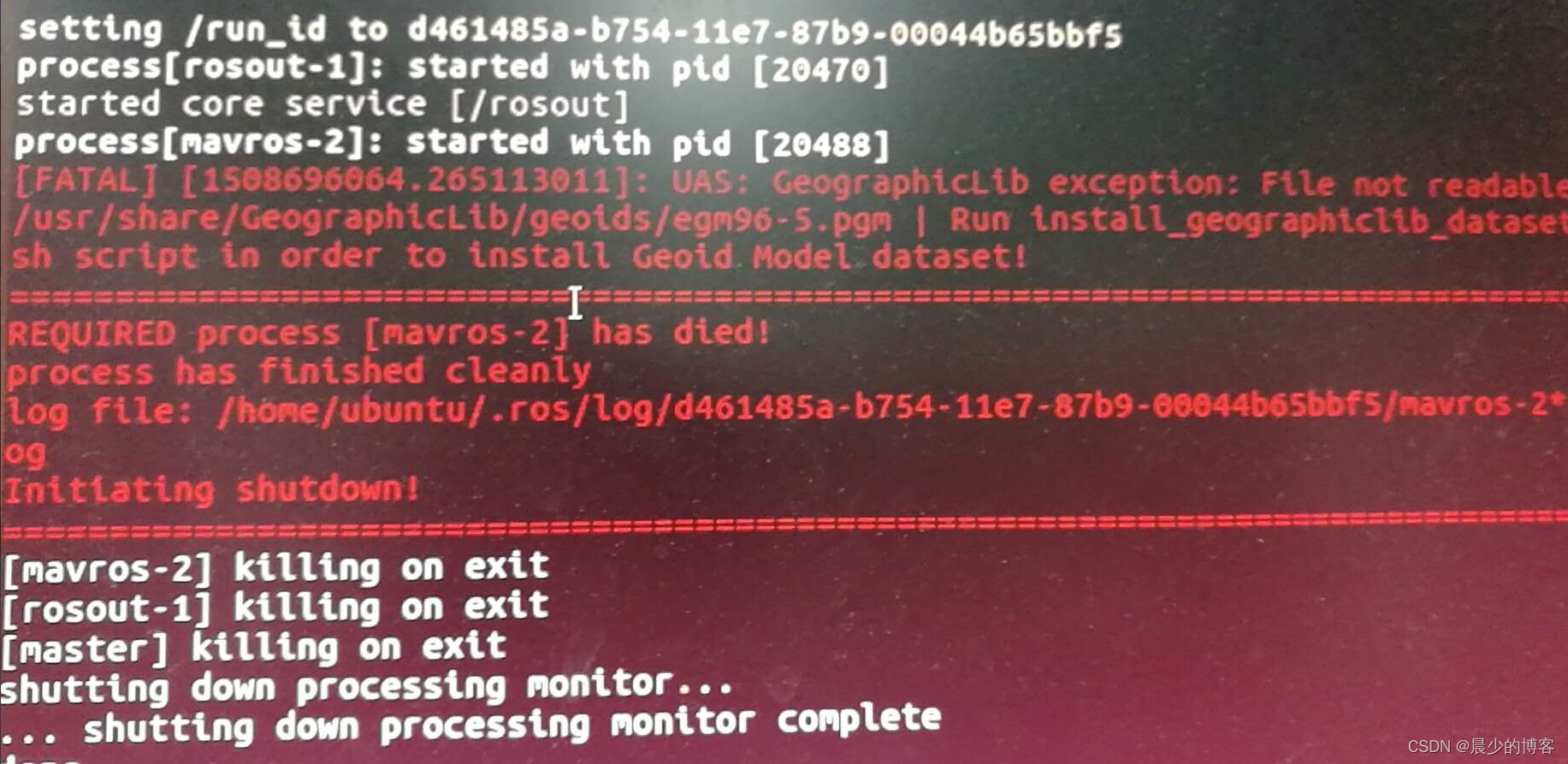 则运行
则运行
sudo /opt/ros/kinetic/lib/mavros/install_geographiclib_datasets.sh
安装QGC
参考网站https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html
PX4仿真
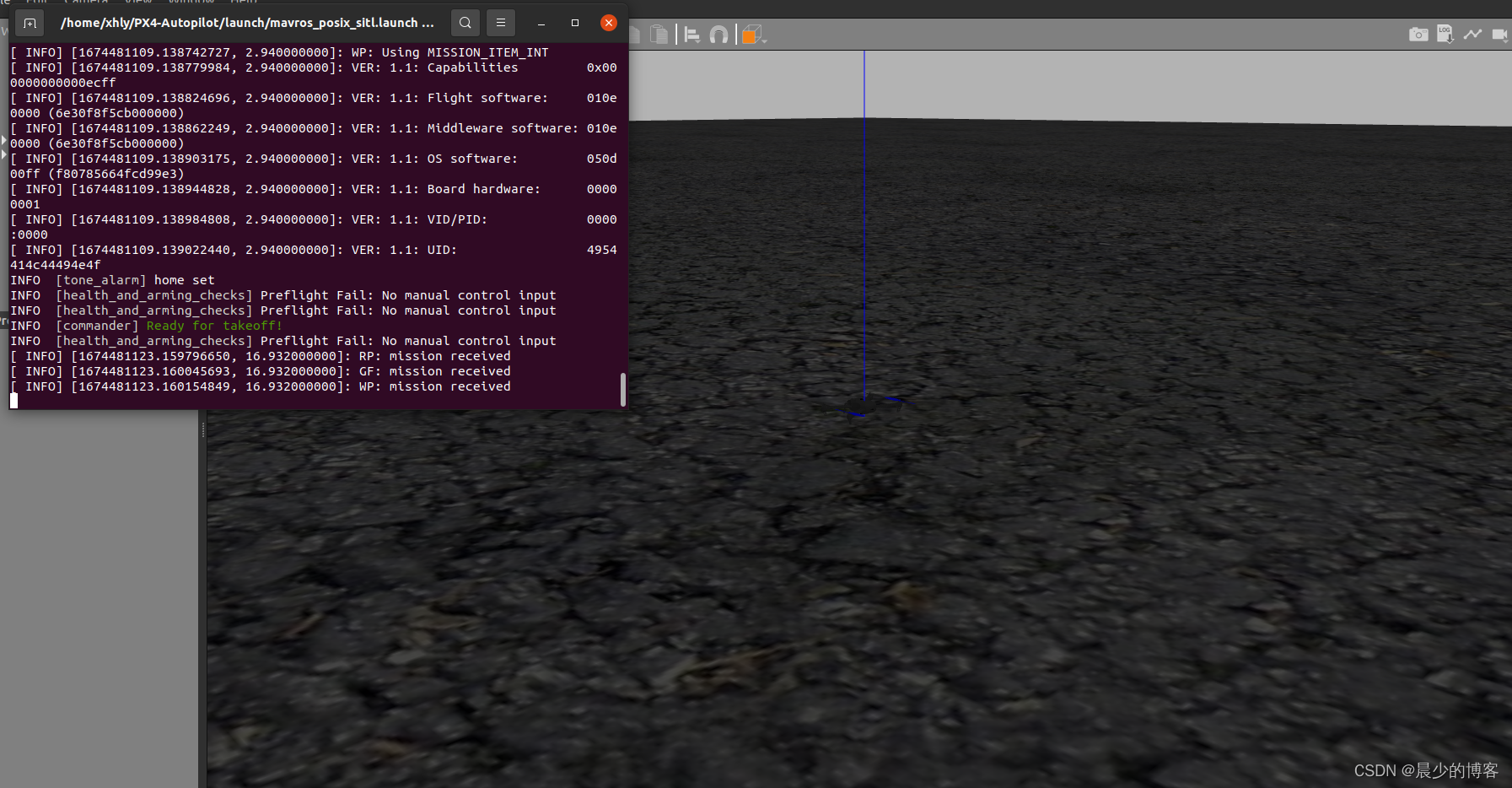
添加完环境变量后可以通过以下命令进行PX4仿真
roslaunch px4 mavros_posix_sitl.launch
该launch文件会启动gazebo、mavros、px4.launch等
查看mavros话题
rostopic list