

自动驾驶感知——物体检测与跟踪算法|4D毫米波雷达
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
文章目录
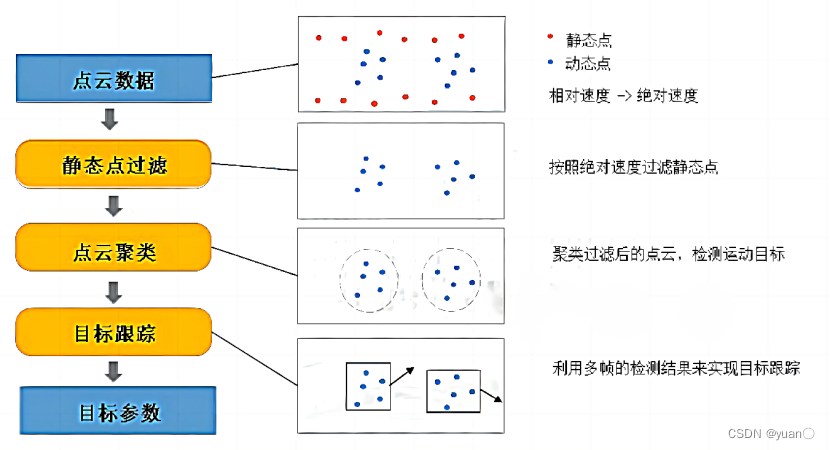
1. 物体检测与跟踪算法
1.1 DBSCAN
DBSCAN: Density Based Spatial Clustering of Applications with Noise;
DBSCAN是基于密度的聚类方法对样本分布的适应能力比K-Means更好。
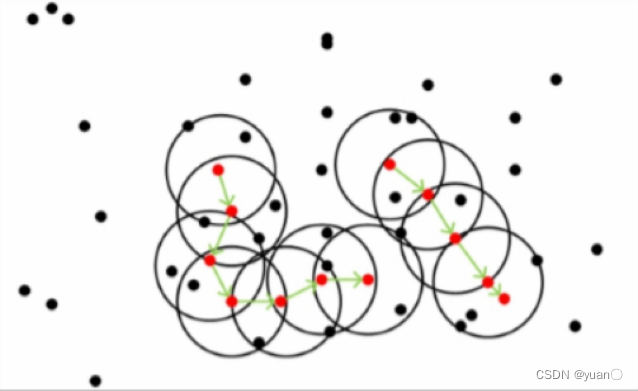
黑色的点是非核心对象
注意:距离的度量不限于点的空间距离还可以是其它点特征比如速度、反射强度等
基本思路
假定类别可以通过样本分布的紧密程度决定通过将紧密相连的样本分为一类得到不同的聚类类别。
基本概念
- ( ε , M i n P t s ) (\varepsilon ,MinPts) (ε,MinPts):用来描述邻域的密度;
- ε \varepsilon ε:描述了某一样本的邻域距离阈值;
- M i n P t s MinPts MinPts:描述了邻域中的最小样本数。
- 核心对象:对于任一样本其邻域至少包含MinPts个样本。
算法流程
- 找到所有的核心对象
- 对于每一个未处理的核心对象生成新的聚类;
- 搜索其 ε \varepsilon ε邻域将 ε \varepsilon ε邻域中的点加入该聚类;
- 不断重复以上步骤
DBSCAN的详细讲解可以参考这篇博文DBSCAN详解
K-Means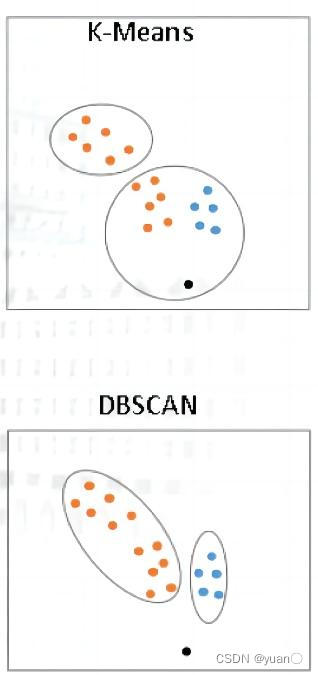
K-Means与DBSCAN 的对比
K-Means
- 需要手工指定cluster的数量
- 所有点都进行聚类不会去除outlier
- 各个方向同等重要只适合于球形的cluster
- 具有随机性每次运行结果不一致
DBSCAN
- 不需要指定cluster个数
- 可以排除outlier
- 对样本分布的适应性更好
- 每次运行结果是一致的
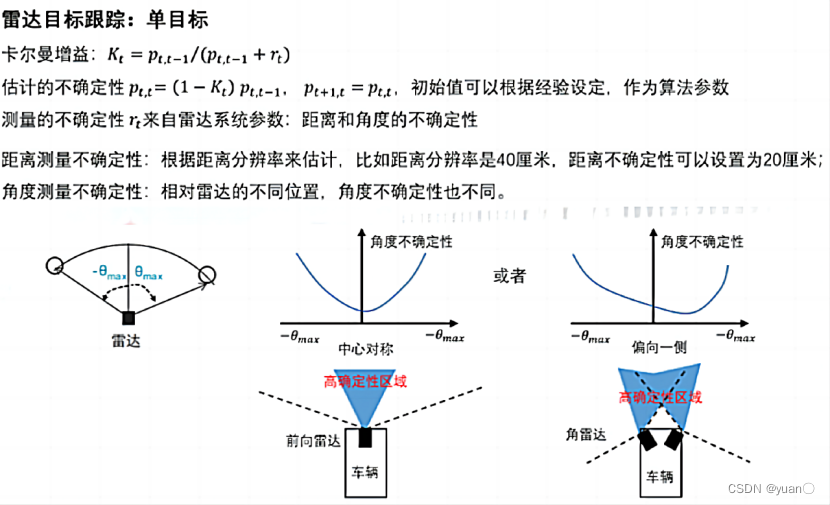
1.2 卡尔曼滤波
本节只是对卡尔曼滤波的应用进行介绍具体原理可见这篇博客——详解卡尔曼滤波原理以及https://www.kalmanfilter.net/
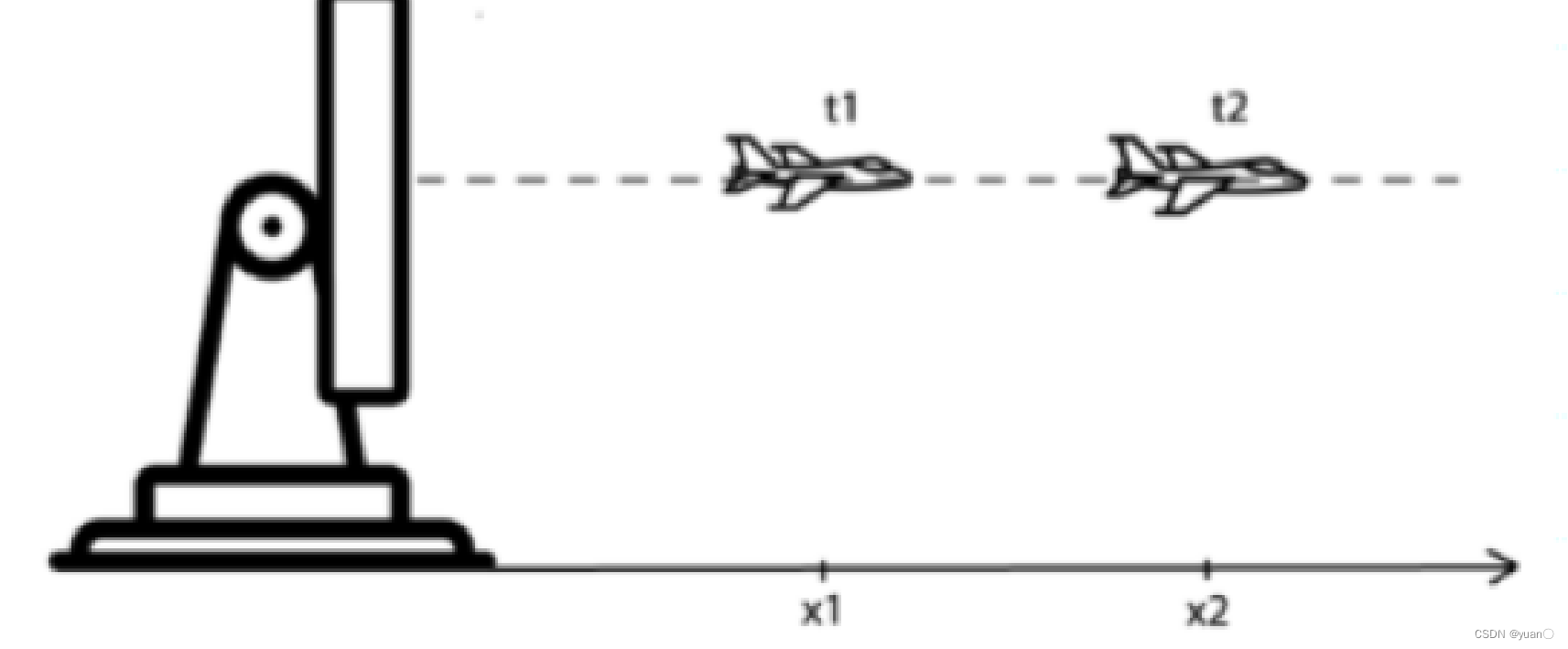
基本概念
以一维雷达测距为例假设速度恒定,
系统状态
x
t
x_t
xt:
t
t
t时刻飞机的航程;
测量值
z
t
z_t
zt:雷达测距结果;
系统状态的估计值
x
⃗
t
,
t
{\vec x_{t,t}}
xt,t:
t
t
t时 刻
x
x
x的估计值(根据
z
z
z估计) ;
系统状态的预测值
x
⃗
t
+
1
,
t
{\vec x_{t + 1,t}}
xt+1,t:
t
+
1
t+1
t+1时刻
x
x
x的预测值(根据速度预测)

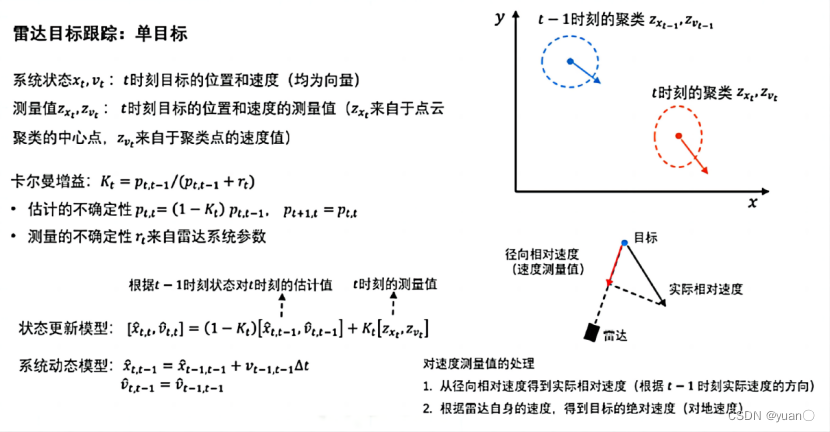
雷达目标跟踪:多目标.
Tracking-by-Detection
- 由聚类算法在单帧点云得到目标输出;
- 提取目标的特征包括统计特征(比如点位置的均值方差等)和运动特征(比如速度和加速度等) ;
- 根据特征计算当前帧的检测目标(detections)与已跟踪的多个目标(tracks)的相似度;
- 按照相似度将de tections分配给tracks;
- 卡尔曼滤波更新tracks的状态参数(位置、速度等)。
2. 毫米波雷达公开数据库的未来发展方向
未来发展方向
-
多模态数据
➢包括同步的图像激光雷达等数据用来进行多传感器融合的研究。 -
多数据类型
➢包括ADC数据RAD数据点云数据等为不同层次的算法研究和实际应用提供支持。 -
360度视场
➢需要多个雷达配合完成以满足多种自动驾驶应用的需求。8.01。 -
大规模数据
➢一般来说至少要有超过10万帧的不同场景不同天气条件下采集的数据。 -
丰富的标注信息
➢物体级:类别位置大小方向分割的mask
➢场景级:语义信息比如free space, occupied space等。
3. 4D毫米波雷达特点及发展趋势
3.1 4D毫米波雷达特点
4D指的是距离(Range) 水平角度(Azimuth) 俯仰角度( Elevation)和速度(Doppler) 。一般来说 4D 毫米波雷达的角度分辨率相对较高因此也经常被称为4D成像雷达。
4D毫米波雷达的两个主要特点是:
1)可以测量高度的信息;
2)角度分辨率较高。
为了更好的理解这两点首先要了解FMCW雷达角度分辨率的依赖因素,以及为了增加角度分辨率所采用的MIMO机制。
3.1.1 FMCW雷达角度分辨率
想要测量目标的方位角至少需要两个接收天线(RX).可以通过相位差来求得方位角
θ
=
sin
−
1
(
ω
λ
2
π
d
)
\theta = {\sin ^{ - 1}}(\frac{{\omega \lambda }}{{2\pi d}})
θ=sin−1(2πdωλ)
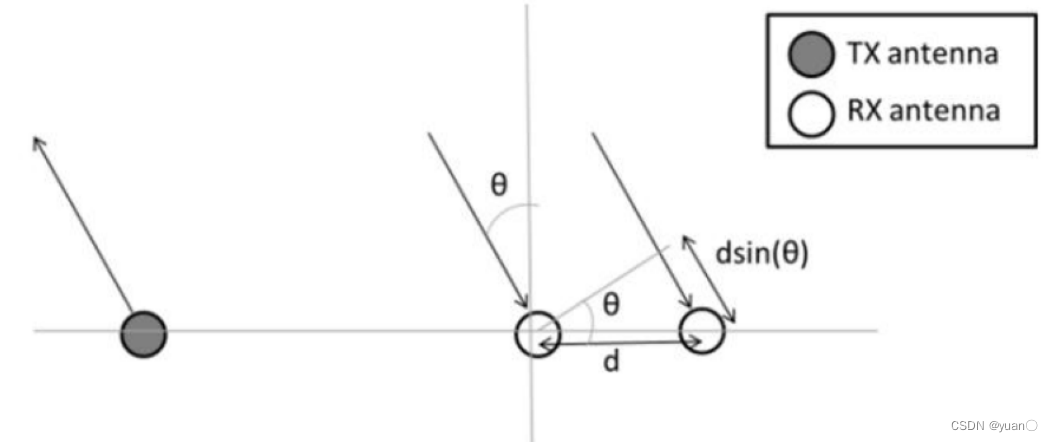
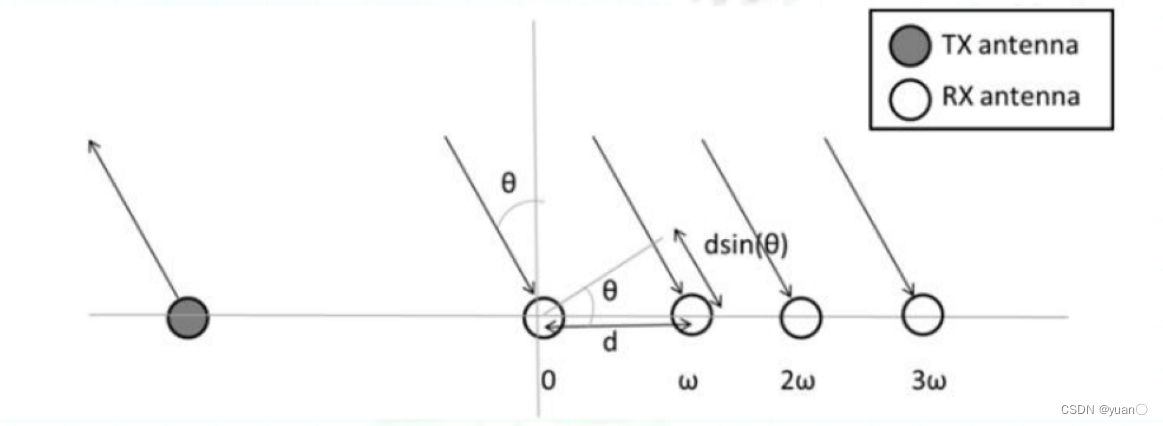
在有多个接收天线时每个接收信号与前一个接收信号之间的相位差都是
ω
\omega
ω。以下图为例假设有4个接收天线以第一个接收天线为基准4个接收信号的相位差分别为0
ω
\omega
ω2
ω
\omega
ω3
ω
\omega
ω。这个序列信号的变化频率就是
ω
\omega
ω因此我们通过FFT来提取这个分量(也就是角度FFT)。
如果场景中存在多个目标而且其距离和速度都相同,那么雷达能够区分这些目标的最小角度差称之为角度分辨率。假设有以下场景场景中有两个目标其方位角分别为
θ
\theta
θ和
θ
+
Δ
θ
\theta+\Delta\theta
θ+Δθ对应的相位差分别为
ω
1
\omega_1
ω1和
ω
2
\omega_2
ω2。
ω
1
=
2
π
λ
d
sin
(
θ
)
{\omega _1} = \frac{{2\pi }}{\lambda }d\sin (\theta )
ω1=λ2πdsin(θ)
ω
2
=
2
π
λ
d
sin
(
θ
+
Δ
θ
)
{\omega _2} = \frac{{2\pi }}{\lambda }d\sin (\theta + \Delta \theta )
ω2=λ2πdsin(θ+Δθ)
Δ
ω
=
ω
2
−
ω
1
=
2
π
d
λ
(
sin
(
θ
+
Δ
θ
)
−
sin
(
θ
)
)
\Delta \omega = {\omega _2} - {\omega _1} = \frac{{2\pi d}}{\lambda }(\sin (\theta + \Delta \theta ) - \sin (\theta ))
Δω=ω2−ω1=λ2πd(sin(θ+Δθ)−sin(θ))因为
sin
(
θ
)
\sin(\theta)
sin(θ)的导数为
cos
(
θ
)
\cos(\theta)
cos(θ)所以可得
Δ
ω
=
2
π
d
λ
(
cos
(
θ
)
Δ
θ
)
\Delta \omega = \frac{{2\pi d}}{\lambda }(\cos (\theta )\Delta \theta )
Δω=λ2πd(cos(θ)Δθ)根据傅里叶变换理论N点的FFT可以区分的频率分量最小为2π/N,这里的N就是接收天线的个数。这样我们就可以得到可以分辨的最小角度差也就是角度分辨率。
Δ
ω
>
2
π
N
\Delta \omega > \frac{{2\pi }}{N}
Δω>N2π
⇒
2
π
d
λ
(
cos
(
θ
)
Δ
θ
)
>
2
π
N
\Rightarrow \frac{{2\pi d}}{\lambda }(\cos (\theta )\Delta \theta ) > \frac{{2\pi }}{N}
⇒λ2πd(cos(θ)Δθ)>N2π
⇒
Δ
θ
>
λ
N
d
cos
(
θ
)
\Rightarrow \Delta \theta > \frac{\lambda }{{Nd\cos (\theta )}}
⇒Δθ>Ndcos(θ)λ通常来说我们取
d
=
λ
/
2
,
θ
=
0
d = λ/2, θ = 0
d=λ/2,θ=0 (boresight 方向也就是雷达的中心朝向)。这时角度分辨率公式为:
θ
R
E
S
=
2
N
{\theta _{RES}} = \frac{2}{N}
θRES=N2
从上面的推导可以看出角度分辨率主要依赖于两个因素: 1) 目标的方位角。在boresight方向分辨率最高。越靠近雷达FOV的边缘,角度分辨率越低。2)天线的个数。角度分辨率与天线个数城正比关系。第一个因素我们无法控制而提高FMCW雷达角度分辨率的主要手段就是增加天线个数。
3.1.2 MIMO ( Multiple Input Multiple Output)技术
从角度分辨率的计算公式中可以看到想要提高雷达的角度分辨率必须增加接收天线的个数。但是增加天线的个数会使天线体积变得很大此外每一个接收天线上都要附加一个单独的链路来处理信号比如混频器、IF滤波器和ADC。不仅硬件设计变得复杂而且成本也会增加。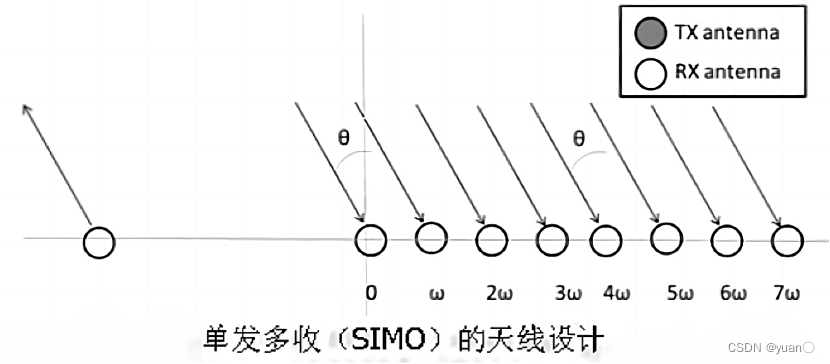
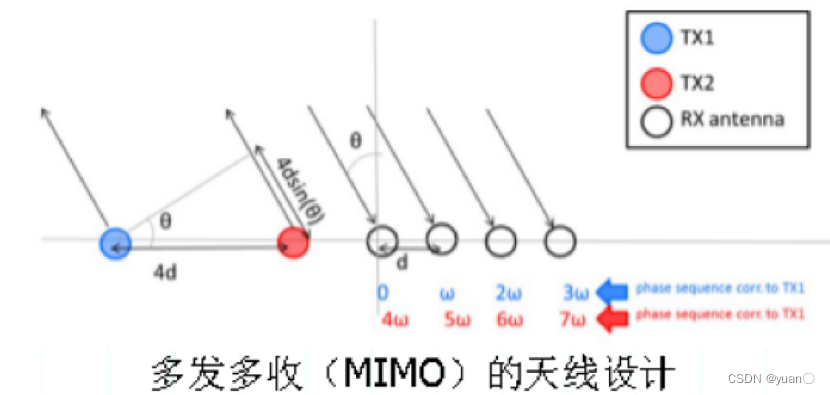
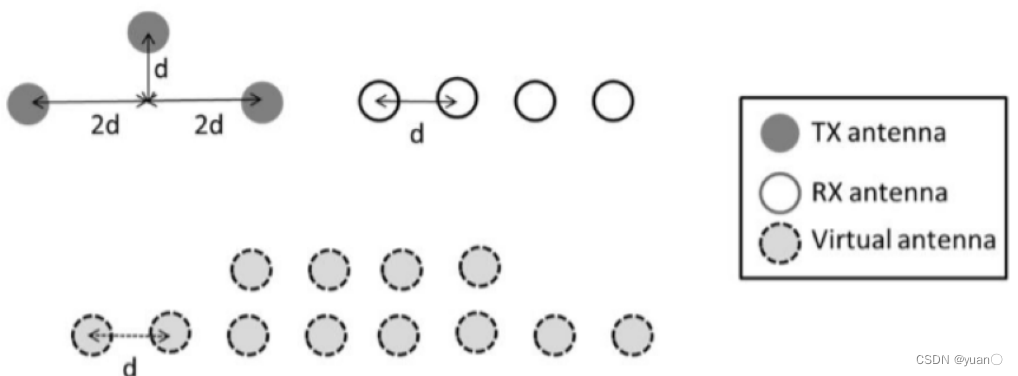
采用MIMO (多发多收)的天线设计来降低接收天线的个数。比如如果想要得到8个接收天线采用2个发射天线和4个接收天线这样就可以得到等效的8个虛拟接收天线阵列。一般来说不同的发射天线会间隔发射或者发射不同波形的信号这样接收天线就可以区分来自不同发射天线的信号。
当发射天线有垂直方向的分布时就可以测量目标的俯仰角度。下图就是一个典
型的3发4收的天线排列结构。等效的接收天线有12个垂直方向上有两个天线
可以用来测量俯仰角度。
3.2 4D毫米波雷达发展趋势
3.2.1 芯片级联
4D成像雷达的核心在于较高的水平和垂直角度分辨率这就需要增加发射和接收天线的个数。目前绝大多数毫米波雷达都是采用单片收发器通常只有3发4收也就是只有12个虛拟天线。一个增加虚拟天线的方案是基于现有的量产雷达将多个雷达芯片进行级联比如德国大陆的ARS540和华为的4D成像雷达。
ARS540采用4片级联的形式将4片NXP的77GHz毫米波雷达收发器(MMIC)MR3003进行级联。每个MR3003是3发4收4片联在一起就是12发16收这样就可以产生192个虚拟天线。ARS540是第一个具备能够真正测量目标高度的毫米波雷达其垂直角度分辨率可以达到2.3°水平角度分辨率可以达到1.2°
3.2.2 专用芯片
除了采用现有的量产雷达进行级联还有的公司直接将多发多收的天线嵌入到一个雷达芯片里比如Arbe, Vayyar 以及Mobileye。Arbe 提供的4D成像毫米波雷达Phoenix采用48发48收虚拟通道达到个2304个。Mobileye 同样也是48发48收的天线配置水平和垂直角分辨率可以做到0.5°和2°。
3.2.3 标准芯片+软件提升
这种方案基于标准的雷达芯片但是采用软件和AI的方法来提高雷达的分辨率。这里比较有代表性的是傲酷的虚拟孔径成像技术。传统FMCW雷达重复单一的发射波形相位差来自于多根实体接收天线而傲酷虚拟孔径成像雷达波形可以对发射波进行调频调相、调幅也就是说每根接收天线在不同时间产生不同的相位形成“虚拟天线孔径”。而且这种调整是可以根据当前环境进行自适应的也就是说根据上一帧的检测结果来调整当前帧的波形。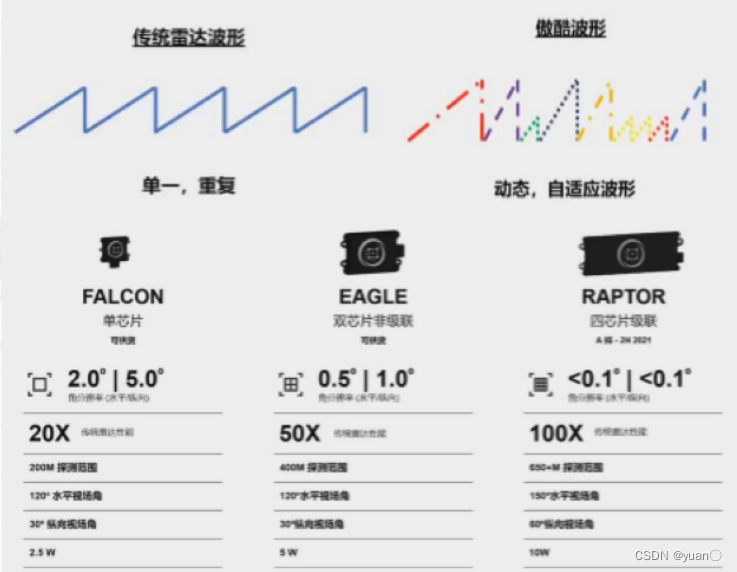
声明
本人所有文章仅作为自己的学习记录若有侵权联系立删。本系列文章主要参考了清华大学、北京理工大学、深蓝学院、百度Apollo等相关课程。