

自动驾驶之—2D到3D升维-CSDN博客
阿里云国际版折扣https://www.yundadi.com |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
前言
最近在学习自动驾驶方向的东西简单整理一些学习笔记学习过程中发现宝藏up 手写AI
- 3D卷积
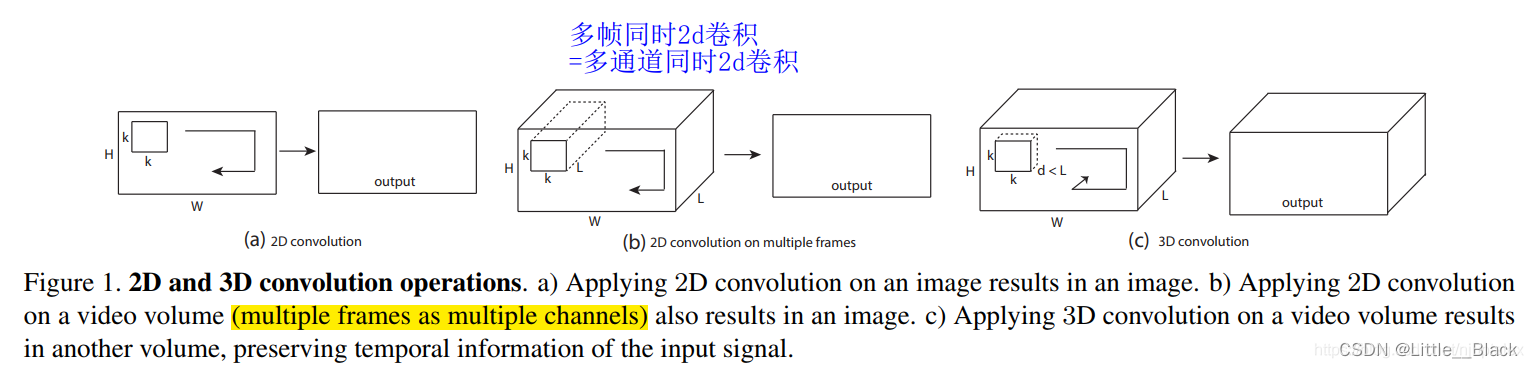
3D卷积的作用对于2DCNN我们知道可以很好的处理单张图片中的信息但是其对于视频这种由多帧图像组成的图片流以及CT****等一些医学上的3维图像就会显得束手无策。因为2D卷积没有考虑到图像之间时间维度上的物体运动信息的变化3维CT图像也可以近似看为是二维图像在时间上的变化。因此为了能够对视频包括3维医学图像信息进行特征提取以便用来分类及分割任务提出了3D卷积在卷积核中加入时间维度。
- pytorch中对应函数介绍
class torch.nn.Conv3d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)
说明
参数kernel_sizestridepaddingdilation可以是一个int的数据 - 卷积height和width值相同也可以是一个有三个int数据的tuple数组tuple的第一维度表示depth的数值tuple的第二维度表示height的数值tuple的第三维度表示width的数值
Parameters
in_channels(int) – 输入的通道数
out_channels(int) – 输出的通道数
kernel_size(int or tuple) - 卷积核的尺寸
stride(int or tuple, optional) - 卷积步长
padding(int or tuple, optional) - 边缘填充的像素个数
dilation(int or tuple, optional) – 卷积核元素之间的间距
groups(int, optional) – 卷积的组数
bias(bool, optional) - 如果bias=True添加偏置
举个栗子
# With square kernels and equal stride
m = nn.Conv3d(16, 33, 3, stride=2)
# non-square kernels and unequal stride and with padding
m = nn.Conv3d(16, 33, (3, 5, 2), stride=(2, 1, 1), padding=(4, 2, 0))
input = autograd.Variable(torch.randn(20, 16, 10, 50, 100))
output = m(input)
- 3D卷积图示
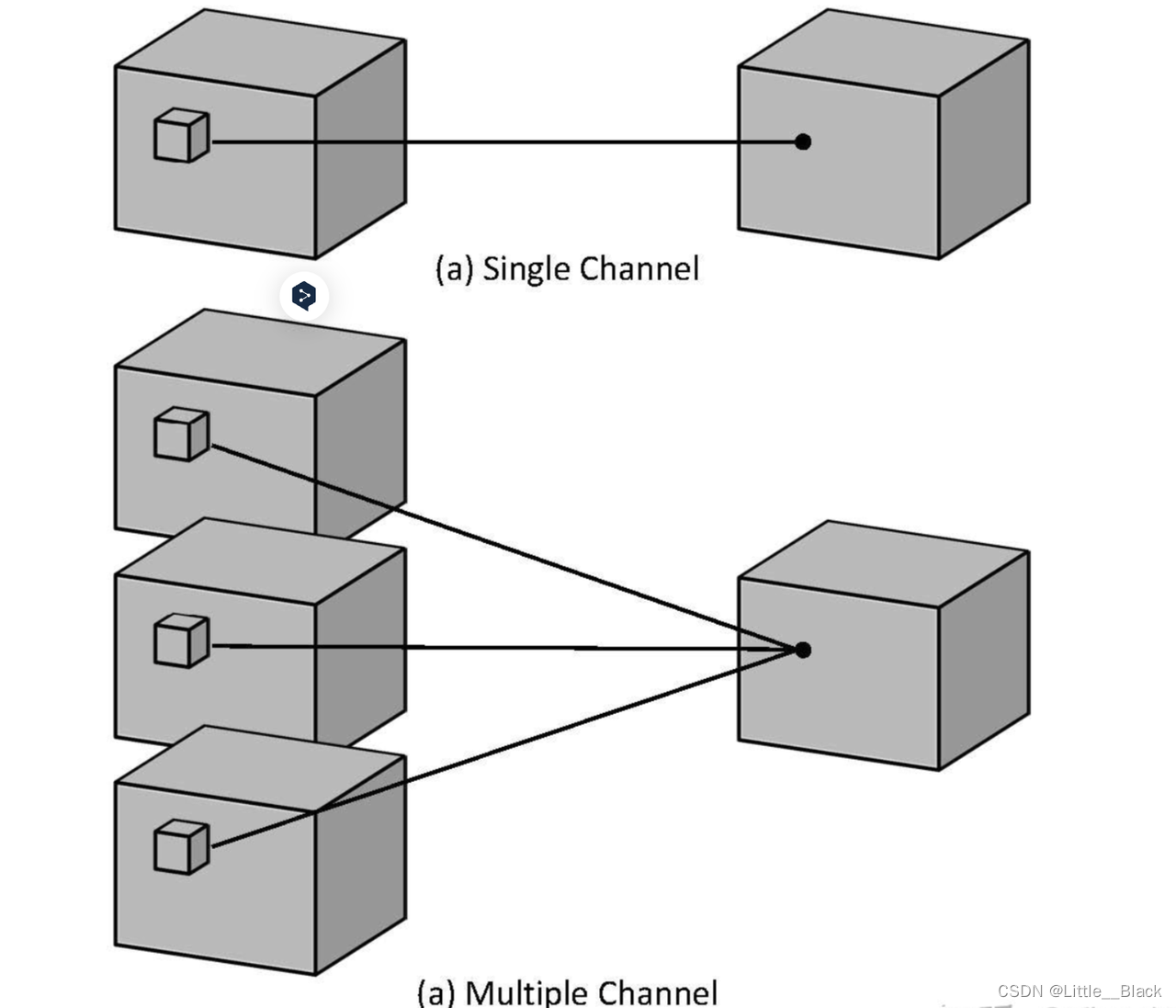
针对单通道与2D卷积不同之处在于输入图像多了一个 depth 维度故输入大小为(1, depth, height, width)卷积核也多了一个k_d维度因此卷积核在输入3D图像的空间维度height和width维和depth维度上均进行滑窗操作每次滑窗与 (k_d, k_h, k_w) 窗口内的values进行相关操作得到输出3D图像中的一个value.
针对多通道输入大小为(3, depth, height, width)则与2D卷积的操作一样每次滑窗与3个channels上的 (k_d, k_h, k_w) 窗口内的所有values进行相关操作得到输出3D图像中的一个value。
2.1 原理简介
使用两个或多个从不同角度拍摄的2D图像来估计每个像素的深度从而重建3D场景。.一般而言立体视觉系统需要有两个或者两个以上摄像头的支持也就正如人类的双眼一样。
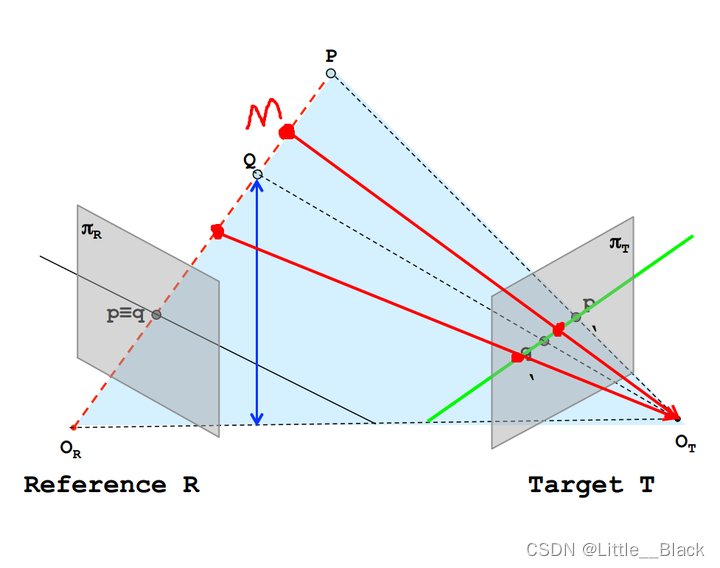
2.2 单目视觉
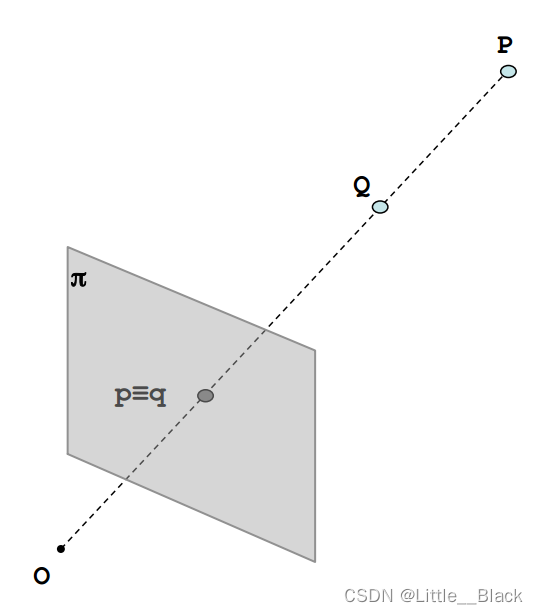
O点为相机的光心π是摄像头的成像平面。
从图中可以看出如果P点与Q点在同一条直线上那么他们在图像上的成像点就是同一个点也就是 p ≡ q p \equiv q p≡q 那么也就看不出来他们在距离上的差异也就无法知道Q在前还是P在前。
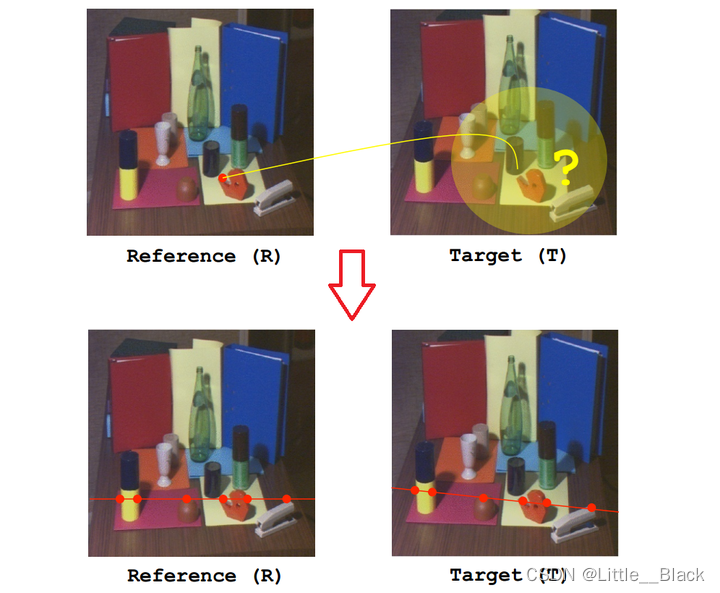
2.3 双目视觉
正是在发现了单目系统的缺陷之后我们将系统由一个摄像头增加到两个摄像头这样也就构成了一个立体系统。如果我们可以在两幅图像中找到对应点我们就可以通过三角测量的方法来求得深度
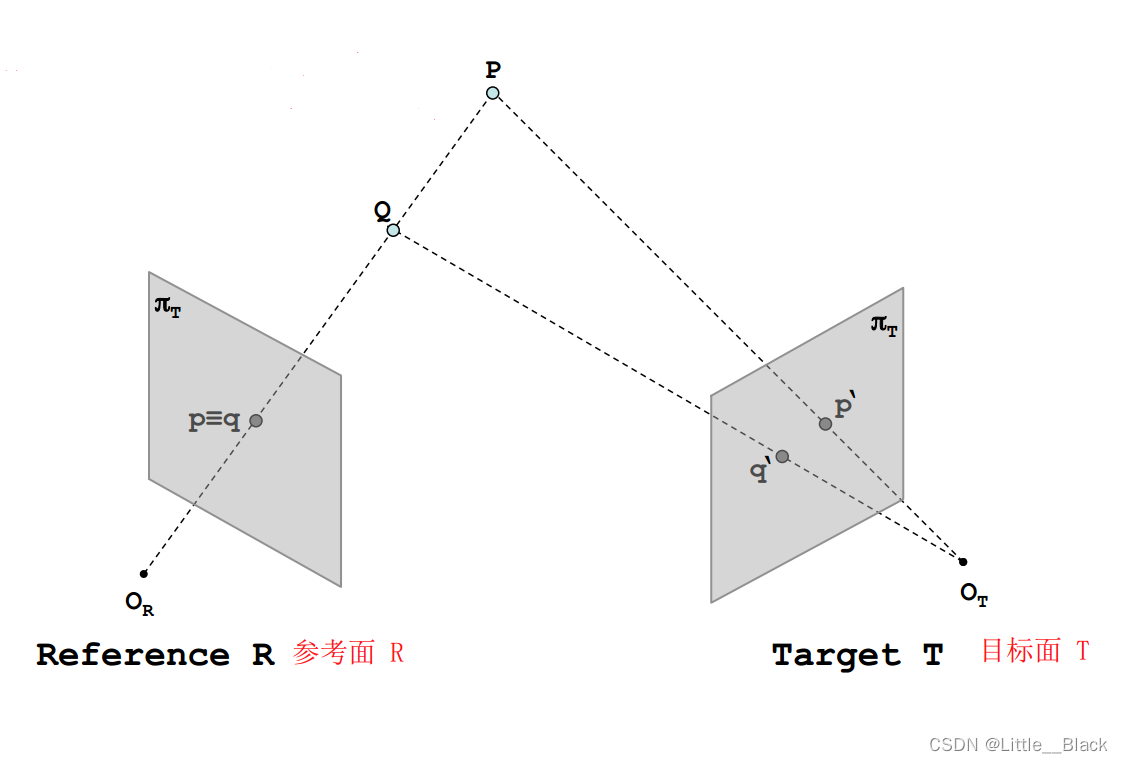
从图中可以很明显的看出在增加了一个摄像头之后P与Q在目标面T上的成像不在位于同一个点而是有自己分别的成像点也就是
q
′
q^{'}
q′ 与
p
′
p^{'}
p′。
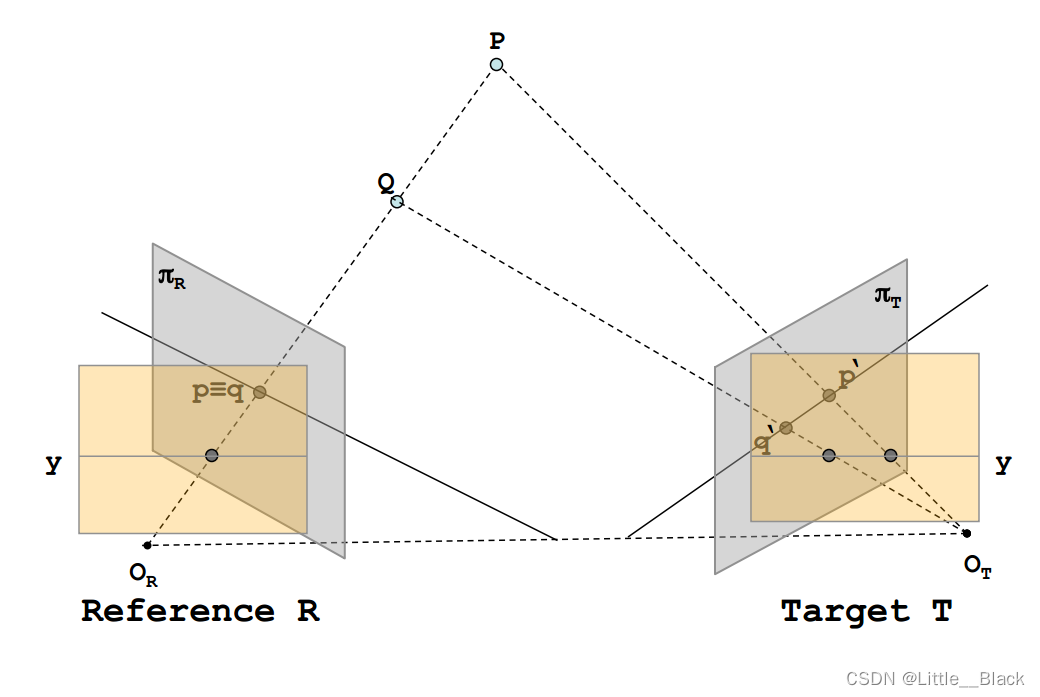
那么在我们给出了Reference与Target之后我们应该如何解决参考面与目标面之间的对应关系呢
这个时候就需要对极约束极线约束对极约束意味着一旦我们知道了立体视觉系统的对极几何之后对两幅图像间匹配特征的二维搜索就转变成了沿着极线的一维搜索。
图中黑色实线为R平面一条极线绿色为T平面一条极线。给定一幅图像上的一个特征它在另一幅图像上的匹配视图一定在对应的极线上图中将PQ视为特征可以看到在T上的成像在绿色直线上
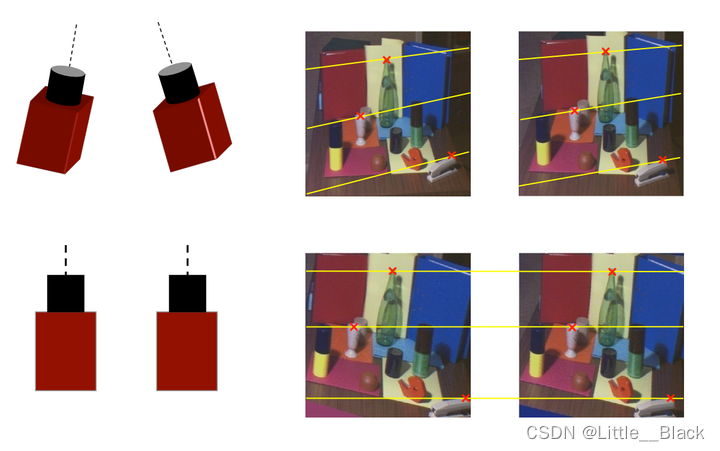
通常我们使用的立体视觉系统都是比较标准的系统如图所示
一旦我们知道了对应点的搜索区域就可以将其从2D降到1D这样就形成了更加方便的立体视觉对应点都被约束再同一条极线上也就是图中的y直线。下面给出一个实际的示例在理想情况下我们希望两个摄像头的参数是完全一致的并且两个相机的位置是平行的。
2.4 视差和深度计算原理
在我们已经确保两个摄像头的参数是完全一致的并且两者的位置是平行之后我们的关注点就落到了如何计算物体的深度信息这也是最重要最关键的地方。下面给出的是标准立体视觉系统下的计算原理。
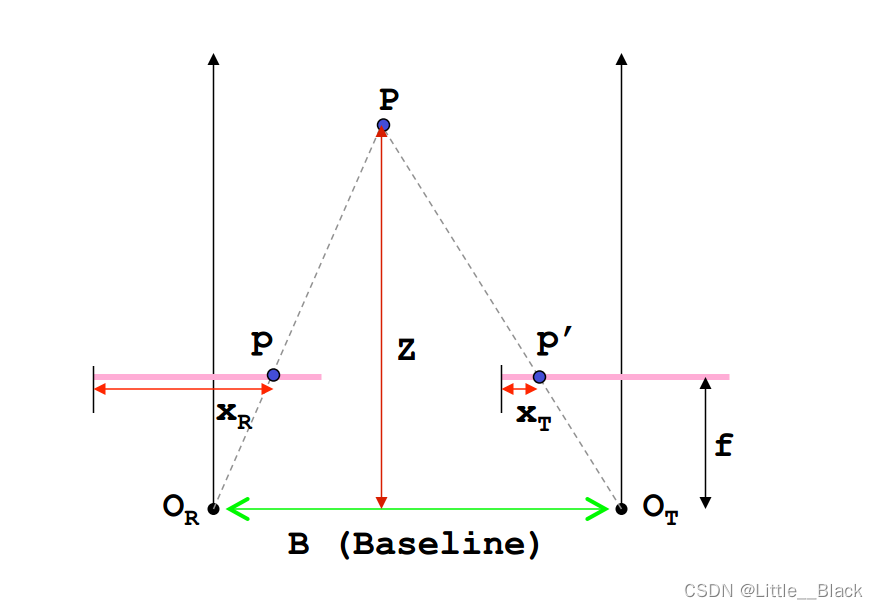
假设
P
P
P 为空间中的一点
O
R
O_R
OR为左边摄像头的光心
O
T
O_T
OT为右边摄像头的光心摄像头的焦距为
f
f
f(光心到成像平面的距离)成像平面在图中用粉色线表示
B
B
B表示两个摄像头光心之间的距离也称为基线
P
P
P在左右两个摄像机成像平面上的成像点分别为
p
p
p与
p
′
p'
p′
x
R
x_R
xR与
x
T
x_T
xT为成像点的水平方向距离(通常我们得到的是像素坐标系下的
x
x
x左边其单位为像素因此需要转换为实际的物理长度涉及到坐标系转换问题)
Z
Z
Z就是我们需要求的深度。
根据三角形相似定理( Δ P p p ′ \Delta Ppp' ΔPpp′~ Δ P O R O T \Delta PO_RO_T ΔPOROT):
B Z = B − ( x R − x T ) Z − f \frac{B}{Z}=\frac{B-(x_R-x_T)}{Z-f} ZB=Z−fB−(xR−xT)===> Z = B ⋅ f x R − x T = B ⋅ f D Z=\frac{B\cdot f}{x_R-x_T}=\frac{B\cdot f}{D} Z=xR−xTB⋅f=DB⋅f
其中 D = x R − x T D = x_R-x_T D=xR−xT 就是我们通常所说的视差(disparity)。
我们可以发现深度Z是跟视差D成反比关系的当视差D越小时Z越大物体离立体视觉系统也就越远 当视差D越大Z越小物体离立体视觉系统也就越近。这一点和我们人眼系统是一样的当我们观察离我们比较近的物体的时候视差很大可以获得的信息也就越多当物体离我们很远的时候视差很小我们获得的信息也就很少了。
在图像处理中我们通常用灰度值来表示视差信息视差越大其灰度值也就越大在视差图像的视觉效果上表现出来就是图像越亮物体离我们越远其视差越小灰度值也越小视差图像也就越暗。
2.5 深度估计
- 工作原理使用深度学习模型来预测2D图像中每个像素的深度
- 优势可以从单个2D图像中获得3D深度信息
- 应用增强现实、虚拟现实、3D重建
3.1
世界坐标系 —> 相机坐标系 —> 投影矩阵 —> 像素映射 —> 生成图片
- 世界坐标系和相机坐标系转换可以通过dcm矩阵计算求出
def dcm(origin: np.ndarray, target: np.ndarray):
"""
3 * 3 矩阵 {x,y,z}T 将origin坐标系转换到target坐标系的dcm旋转矩阵
Args:
origin:
target:
Returns:
"""
matrix = np.zeros((3, 3))
for i in range(3):
for j in range(3):
matrix[i, j] = np.dot(target[i], origin[j])
return matrix.T
- 投影矩阵可以参考pyrender.camera.py中的透视投影和正交投影矩阵也可以根据自己的需求定制
- 通过前两步计算出2d投影点会落在(-1, 1)范围内通过像素映射完成3d点到2d点的投影
完整代码
class Camera:
def __init__(self, scale, translation, resolution, znear=0.05, zfar=1000):
self.scale = np.array(scale) # 相机缩放
self.translation = np.array(translation) # 相机位移
self.resolution = np.array(resolution) # 2d 分辨率
self.znear = znear # 近平面
self.h_s = self.resolution / 2 # h/2 w/2
self.center = self.h_s # 2d投影面中心点
def camera_matrix(self):
"""
相机外参矩阵世界坐标系转相机坐标系
Returns:
"""
world = np.eye(3)
camera = np.eye(3)
camera[-1, -1] = -1
matrix = np.eye(4)
matrix[:3, :3] = dcm(world, camera)
return matrix
def get_projection_matrix(self) -> np.ndarray:
"""
投影矩阵 业务定制
Returns:
"""
P = np.eye(4)
P[0, 0] = self.scale[0]
P[1, 1] = self.scale[1]
P[0, 3] = self.translation[0] * self.scale[0]
P[1, 3] = -self.translation[1] * self.scale[1]
P[2, 2] = -1
return P
class Render:
def __init__(self, camera: Camera):
self.camera = camera
def p_point(self, point: np.ndarray):
"""
投影点坐标
Args:
point: 点 4D 例如[0.5,0.5,0.5,1] 3d点需要填充1
Returns:
"""
p = self.camera.get_projection_matrix().dot(self.camera.camera_matrix().dot(point))
p = p[:2] / p[-1] * self.camera.h_s * np.array([1, -1]) + self.camera.center
return p
3.2 2.5D表示
2D、2.5D和3D是描述物体和场景在空间中表示的三种方式2D(平面)与3D(立体)又称为二维和三维他们之间的区别是2D你只能看到一个面3D你能看到所有的面。
- 定义
- 2D(二维)在2D中物体或场景只有长度和宽度两个维度常见的2D表示有图片、图画和屏幕上的图像
- 2.5D(二点五维)介于2D和3D之间它通常描述的是一个场景从特定角度的深度信息一个2.5D图像例如深度图为每个像素提供了一个深度值。
- 3D(三维)3D表示考虑了长度、宽度和深度它为场景中的每个点提供了完整的三维坐标常见的3D表示包括3D模型、点云等。
- 区别
- 维度和信息完整性2D缺乏深度信息2.5D提供了从某个视角的深度信息3D提供了完整的三维坐标信息。
- 视角依赖性2.5D通常与特定的视角相关而3D表示是视角无关的
- 数据复杂性2D数据最简单只需要x和y坐标2.5D需要x、y和深度3D需要x、y和z三个坐标。
- 联系
- 从2D到2.5D: 如果你有一个2D图像和与之相关的深度信息你可以得到一个2.5D表示。例如使用深度相机如Kinect可以得到深度图。
- 从2D到3D: 通过多个2D图像和某种形式的结构从运动或立体视觉你可以重建出3D场景或物体。但这比从2.5D到3D更为复杂。
- 从2.5D到3D: 从深度图中可以重建3D信息例如生成一个点云。但由于2.5D信息通常是从一个视角获得的因此可能不能完全恢复物体或场景的所有3D信息。
- 简而言之2D、2.5D和3D代表了逐渐增加的空间信息和复杂性。2.5D是一个中间表示提供了比2D更多的深度信息但没有3D那么完整。
- 2D与2.5D的关系可以看成X轴与Y轴旋转了指定的角度后形成的新的屏幕
-
坐标旋转算法
-
-
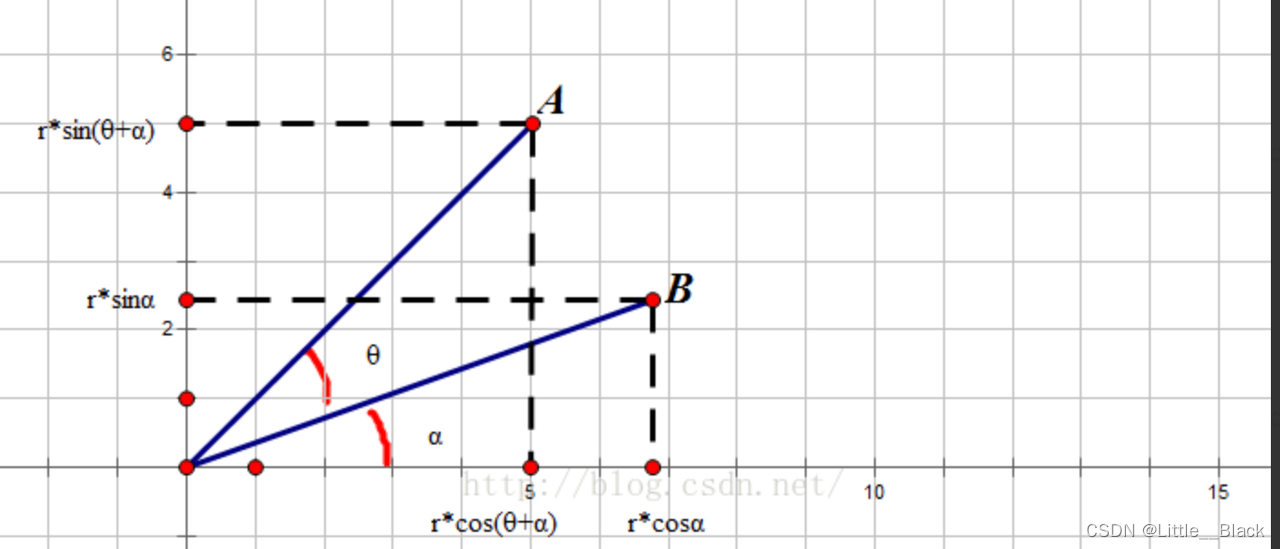
根据三角函数公式
-
sin ( A + B ) = sin A ∗ cos B + sin B ∗ cos A \sin(A+B) = \sin A * \cos B + \sin B * \cos A sin(A+B)=sinA∗cosB+sinB∗cosA
-
cos ( A + B ) = cos A ∗ cos B − sin A ∗ sin B \cos(A+B)=\cos A * \cos B - \sin A * \sin B cos(A+B)=cosA∗cosB−sinA∗sinB
-
线段由 B O BO BO转到 A O AO AO,旋转后的坐标计算公式如下
-
( x , y ) [ c o s θ s i n θ − s i n θ c o s θ ] = ( x ∗ c o s θ − y ∗ s i n θ , x ∗ s i n θ + y ∗ c o s θ ) (x,y) \left[ \begin{matrix} cos\theta &sin\theta \\ -sin\theta & cos\theta \end{matrix} \right]=(x*cos\theta-y*sin\theta, x*sin\theta+y*cos\theta) (x,y)[cosθ−sinθsinθcosθ]=(x∗cosθ−y∗sinθ,x∗sinθ+y∗cosθ)
-
通过矩阵的知识可以知道X轴的基向量为[1,0]Y轴的基向量为[0,1]。有X和Y轴基向量组成的矩阵是一个单位矩阵。所以常规的平面直角坐标系的任何一点可以表示为
( x , y ) [ 1 0 0 1 ] = ( x 1 , y 1 ) (x,y)\left[ \begin{matrix} 1 &0 \\ 0 & 1 \end{matrix} \right]=(x1, y1) (x,y)[1001]=(x1,y1)
为了将2D坐标映射到2.5D坐标需要定义2.5D坐标系统使用的基向量。因为2.5D坐标系实际上是通过旋转X与Y轴实现的所以通过旋转算法和上面的单位矩阵可以得到新坐标系的X和Y轴基向量
[ 1 0 0 1 ] [ c o s θ s i n θ − s i n α c o s α ] = [ c o s θ s i n θ − s i n α c o s α ] \left[ \begin{matrix} 1 &0 \\ 0 & 1 \end{matrix} \right]\left[ \begin{matrix} cos\theta &sin\theta \\ -sin\alpha & cos\alpha \end{matrix} \right]=\left[ \begin{matrix} cos\theta &sin\theta \\ -sin\alpha & cos\alpha \end{matrix} \right] [1001][cosθ−sinαsinθcosα]=[cosθ−sinαsinθcosα]
可以看出将2D坐标系中的基向量转换为2.5D坐标系统的基向量时结果其实就是旋转矩阵本身这个旋转矩阵就是2.5D坐标系中的X和Y轴基向量。
注意这里分别使用θ和α是因为X和Y轴可以旋转不同的角度。如果 θ+α=90度那么Sin(α)=Cos( θ )Cos(α)=Sin( θ )。上面的矩阵可以被替换为
[ c o s θ s i n θ − c o s θ s i n θ ] \left[ \begin{matrix} cos\theta &sin\theta \\ -cos\theta & sin\theta \end{matrix} \right] [cosθ−cosθsinθsinθ]
现在定义2D坐标系为W(x,y)2.5D坐标系为G(x,y)。2D坐标系的X轴相对于2.5D坐标系X轴顺时针旋转30°Y轴旋转60°。通过上面的公式可以得到W(x,y)对应的G(x,y)
G x = ( W x − W y ) ∗ c o s θ G_x = (W_x-W_y) * cos\theta Gx=(Wx−Wy)∗cosθ
G y = ( W x + W y ) ∗ s i n θ G_y = (W_x+W_y) * sin\theta Gy=(Wx+Wy)∗sinθ
2.5D坐标只需利用上面的工作进行逆运算就能得到
W x = ( G x ∗ s i n θ + G y ∗ c o s θ ) / 2 ∗ s i n θ ∗ c o s θ W_x = (G_x*sin\theta+G_y*cos\theta)/2*sin\theta*cos\theta Wx=(Gx∗sinθ+Gy∗cosθ)/2∗sinθ∗cosθ
W y = ( G y ∗ c o s θ − G x ∗ s i n θ ) / 2 ∗ s i n θ ∗ c o s θ W_y = (G_y*cos\theta-G_x*sin\theta)/2*sin\theta*cos\theta Wy=(Gy∗cosθ−Gx∗sinθ)/2∗sinθ∗cosθ
4.1 多视图网络
- 工作原理使用从不同角度的多个2D视图的信息来提取3D特征。
- 应用3D物体识别、3D重建。
- 优点能够从不同的2D视图中捕获3D信息。
4.2 融合2D和3D特征
- 工作原理将2D图像特征与3D数据特征例如点云结合起来。
- 应用3D物体检测、场景分割。
- 优点利用了2D图像和3D结构的强大信息。
阿里云国际版折扣https://www.yundadi.com |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |