

动手深度学习-欠拟合和过拟合
| 阿里云国内75折 回扣 微信号:monov8 |
| 阿里云国际,腾讯云国际,低至75折。AWS 93折 免费开户实名账号 代冲值 优惠多多 微信号:monov8 飞机:@monov6 |
目录
参考教程:https://courses.d2l.ai/zh-v2/
训练误差和泛化误差
训练误差(training error是指 模型在训练数据集上计算得到的误差。 泛化误差(generalization error是指 模型在新数据上的误差。
K-折交叉验证
当训练数据稀缺时我们甚至可能无法提供足够的数据来构成一个合适的验证集。 这里我们采用K-折交叉验证的方法:将训练数据分割成K块使用第i(0<i<=k块作为验证数据集其余的作为验证数据集 最后通过对K次实验的结果取平均来估计训练和验证误差。
欠拟合和过拟合
过拟合是指模型能很好地拟合训练样本但对新数据的预测准确性很差。
欠拟合是指模型不能很好地拟合训练样本且对新数据的预测准确性也不好。
是否过拟合或欠拟合可能取决于模型复杂性和可用训练数据集的大小。
模型复杂性
高阶多项式函数比低阶多项式函数复杂得多。 高阶多项式的参数较多模型函数的选择范围较广。 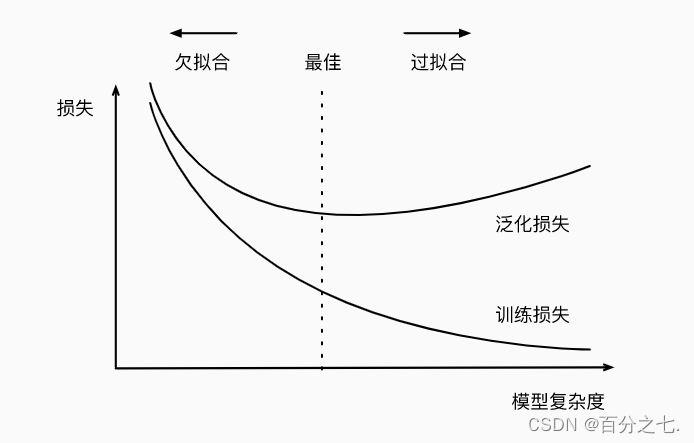
数据集大小
训练数据集中的样本越少我们就越有可能(且更严重地过拟合。 随着训练数据量的增加泛化误差通常会减小。对于固定的任务和数据分布模型复杂性和数据集大小之间通常存在关系。 给出更多的数据我们可能会尝试拟合一个更复杂的模型。 能够拟合更复杂的模型可能是有益的。 如果没有足够的数据简单的模型可能更有用。 对于许多任务深度学习只有在有数千个训练样本时才优于线性模型。 从一定程度上来说深度学习目前的生机要归功于 廉价存储、互联设备以及数字化经济带来的海量数据集。
权重衰减
我们总是可以通过去收集更多的训练数据来缓解过拟合。 但这可能成本很高耗时颇多或者完全超出我们的控制因而在短期内不可能做到。 假设我们已经拥有尽可能多的高质量数据我们便可以将重点放在正则化技术上。权重衰减(weight decay是最广泛使用的正则化的技术之一 它通常也被称为L2正则化。
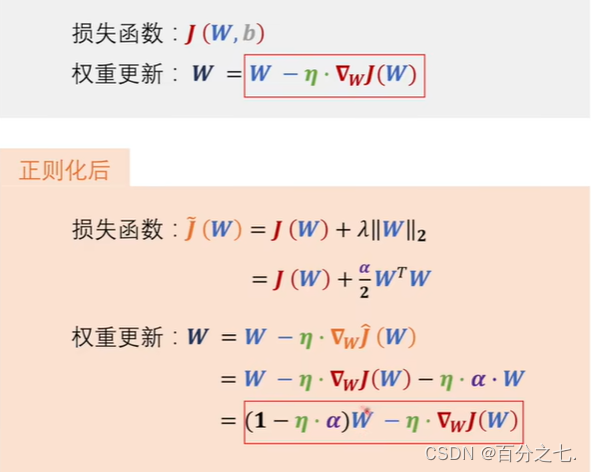
每一次权重更新也就是每一次梯度下降法的学习w的权重都要进行一些缩小也叫做w的系数衰减。
使用L2范数的一个原因是它对权重向量的大分量施加了巨大的惩罚。 在实践中这可能使它们对单个变量中的观测误差更为稳定。 相比之下L1惩罚会导致模型将权重集中在一小部分特征上 而将其他权重清除为零。
权重衰减简洁实现
def train_concise(wd):
net = nn.Sequential(nn.Linear(num_inputs, 1))
for param in net.parameters():
param.data.normal_()
loss = nn.MSELoss(reduction='none')
num_epochs, lr = 100, 0.003
trainer = torch.optim.SGD([
{"params":net[0].weight,'weight_decay': wd},#实例化优化器时直接通过weight_decay指定weight decay超参数
{"params":net[0].bias}], lr=lr)
animator = d2l.Animator(xlabel='epochs', ylabel='loss', yscale='log',
xlim=[5, num_epochs], legend=['train', 'test'])
for epoch in range(num_epochs):
for X, y in train_iter:
trainer.zero_grad()
l = loss(net(X), y)
l.mean().backward()
trainer.step()
if (epoch + 1) % 5 == 0:
animator.add(epoch + 1,
(d2l.evaluate_loss(net, train_iter, loss),
d2l.evaluate_loss(net, test_iter, loss)))
print('w的L2范数:', net[0].weight.norm().item())
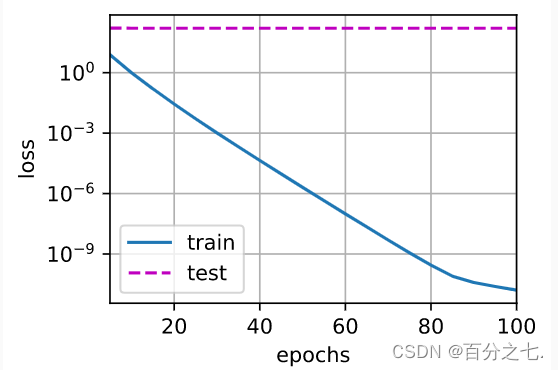
train_concise(0)
#w的L2范数: 14.670721054077148
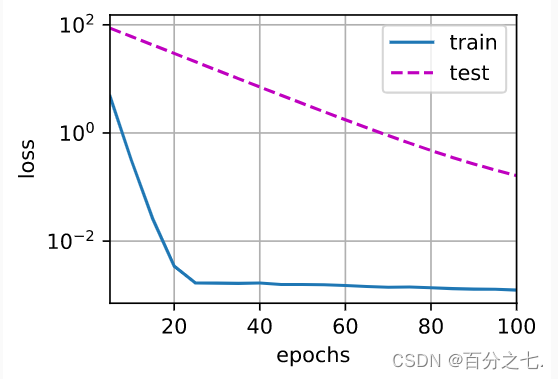
train_concise(3)
#w的L2范数: 0.3454631567001343
wd=0:
wd=3:
- 正则化是处理过拟合的常用方法:在训练集的损失函数中加入惩罚项以降低学习到的模型的复杂度。
暂退法(Dropout
暂退法在前向传播过程中计算每一内部层的同时注入噪声这已经成为训练神经网络的常用技术。 这种方法之所以被称为暂退法因为我们从表面上看是在训练过程中丢弃(drop out一些神经元。 在整个训练过程的每一次迭代中标准暂退法包括在计算下一层之前将当前层中的一些节点置零。
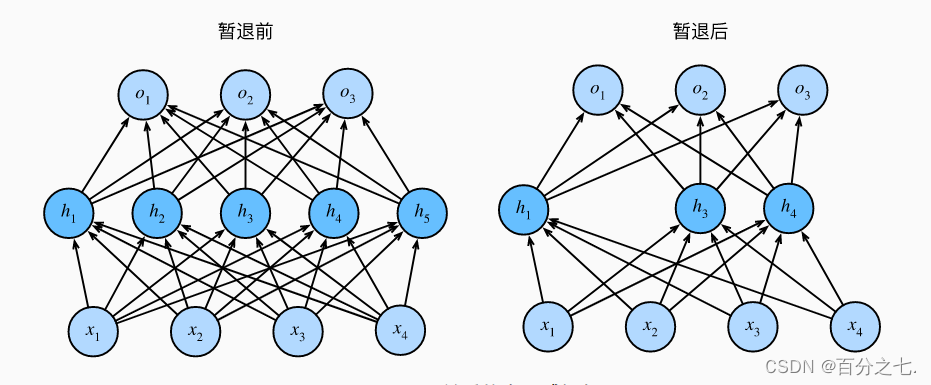
图中删除了h2和h5 因此输出的计算不再依赖于h2或h5并且它们各自的梯度在执行反向传播时也会消失。 这样输出层的计算不能过度依赖于h1,…h5的任何一个元素。通常我们在测试时不用暂退法。 给定一个训练好的模型和一个新的样本我们不会丢弃任何节点因此不需要标准化。
在标准暂退法正则化中通过按保留(未丢弃的节点的分数进行规范化来消除每一层的偏差。 换言之每个中间活性值h以暂退概率p由随机变量h′替换如下所示:
h
′
=
{
0
概率为
p
h
1
−
p
其他情况
h^{\prime}= \begin{cases}0 & \text { 概率为 } p \\ \frac{h}{1-p} & \text { 其他情况 }\end{cases}
h′={01−ph 概率为 p 其他情况
根据此模型的设计其期望值保持不变即E[h′]=h。
- 丢弃法将一些输出项随机置0来控制模型复杂度
- 常作用在多层感知机的隐藏层输出上
- 丢弃概率在控制模型复杂度的超参数中设置(0<p<1
从零开始实现Dropout
def dropout_layer(X, dropout):
assert 0 <= dropout <= 1
# 在本情况中所有元素都被丢弃
if dropout == 1:
return torch.zeros_like(X)
# 在本情况中所有元素都被保留
if dropout == 0:
return X
mask = (torch.rand(X.shape) > dropout).float()
return mask * X / (1.0 - dropout)
简洁实现
我们只需在每个全连接层之后添加一个Dropout层 将暂退概率作为唯一的参数传递给它的构造函数。 在训练时Dropout层将根据指定的暂退概率随机丢弃上一层的输出(相当于下一层的输入。 在测试时Dropout层仅传递数据。
net = nn.Sequential(nn.Flatten(),
nn.Linear(784, 256),
nn.ReLU(),
# 在第一个全连接层之后添加一个dropout层
nn.Dropout(dropout1),
nn.Linear(256, 256),
nn.ReLU(),
# 在第二个全连接层之后添加一个dropout层
nn.Dropout(dropout2),
nn.Linear(256, 10))
def init_weights(m):
if type(m) == nn.Linear:
nn.init.normal_(m.weight, std=0.01)
net.apply(init_weights);
- 暂退法在前向传播过程中计算每一内部层的同时随机丢弃一些神经元。
- 暂退法可以避免过拟合它通常与控制权重向量的维数和大小结合使用的。